车辆的控制方法、装置、电子设备和可读存储介质与流程
本发明涉及车辆控制,尤其是涉及一种车辆的控制方法、装置、电子设备和可读存储介质。
背景技术:
1、在操作员不断老化与施工环境恶劣的背景下,挖掘机的智能化已经成为一个趋势,其中对挖掘机底盘的移动控制是一项关键性的技术,对底盘移动的精确控制能够拓展自动化施工的场景。
2、现有技术中,对挖掘机底盘控制的进行移动控制的研究是一般是基于电动机构而非液压机构的,电动机构能够获取到挖掘机的轮速信息,从而可以对挖掘机的移动进行准确控制;液压机构的挖掘机由于难以安装轮速传感器,因此难以获取到准确的挖掘机的轮速信息。
3、然而,在实际使用中的挖掘机一般是采用液压机构的,由于液压机构的挖掘机难以获取到准确的挖掘机的轮速信息,因此,现有技术难以对挖掘机的移动进行准确控制。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种车辆的控制方法、装置、电子设备和可读存储介质,无需安装轮速传感器也可以准确控制挖掘机的移动,从而提高挖掘机控制的准确性。
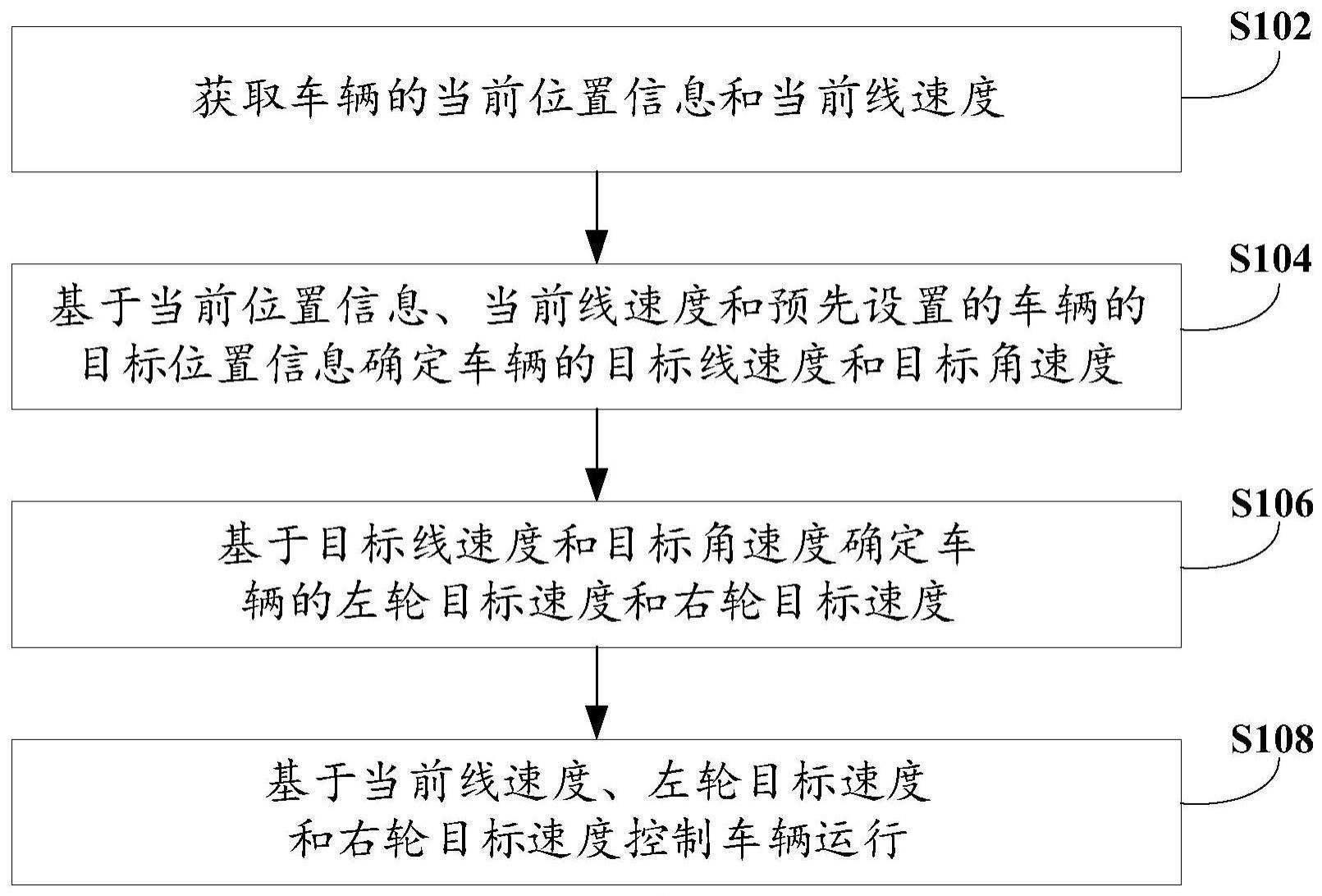
2、第一方面,本发明实施例提供了一种车辆的控制方法,方法包括:获取车辆的当前位置信息和当前线速度;基于当前位置信息、当前线速度和预先设置的车辆的目标位置信息确定车辆的目标线速度和目标角速度;基于目标线速度和目标角速度确定车辆的左轮目标速度和右轮目标速度;基于当前线速度、左轮目标速度和右轮目标速度控制车辆运行。
3、第二方面,本发明实施例还提供一种车辆的控制装置,装置包括:当前位置信息和当前线速度获取模块,用于获取车辆的当前位置信息和当前线速度;目标线速度和目标角速度确定模块,用于基于当前位置信息、当前线速度和预先设置的车辆的目标位置信息确定车辆的目标线速度和目标角速度;左轮目标速度和右轮目标速度确定模块,用于基于目标线速度和目标角速度确定车辆的左轮目标速度和右轮目标速度;车辆运行控制模块,用于基于当前线速度、左轮目标速度和右轮目标速度控制车辆运行。
4、第三方面,本发明实施例还提供一种电子设备,包括处理器和存储器,存储器存储有能够被处理器执行的计算机可执行指令,处理器执行计算机可执行指令以实现上述的车辆的控制方法的步骤。
5、第四方面,本发明实施例还提供一种计算机可读存储介质,计算机可读存储介质存储有计算机可执行指令,计算机可执行指令在被处理器调用和执行时,计算机可执行指令促使处理器实现上述的车辆的控制方法的步骤。
6、本发明实施例带来了以下有益效果:
7、本发明实施例提供了一种车辆的控制方法、装置、电子设备和可读存储介质,基于车辆的当前位置信息、当前线速度和预先设置的车辆的目标位置信息确定车辆的目标线速度和目标角速度;基于目标线速度和目标角速度确定车辆的左轮目标速度和右轮目标速度,并基于当前线速度、左轮目标速度和右轮目标速度控制车辆运行。无需在车辆上安装轮速传感器也可以准确控制车辆的移动,从而提高车辆控制的准确性。
8、本公开的其他特征和优点将在随后的说明书中阐述,或者,部分特征和优点可以从说明书推知或毫无疑义地确定,或者通过实施本公开的上述技术即可得知。
9、为使本公开的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种车辆的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,获取车辆的当前位置信息和当前线速度,包括:
3.根据权利要求1所述的方法,其特征在于,基于所述当前位置信息、所述当前线速度和预先设置的所述车辆的目标位置信息确定所述车辆的目标线速度和目标角速度,包括:
4.根据权利要求3所述的方法,其特征在于,基于所述当前位置信息、所述目标线速度和预先设置的所述车辆的目标位置信息确定所述车辆的目标角速度,包括:
5.根据权利要求1所述的方法,其特征在于,基于所述目标线速度和所述目标角速度确定所述车辆的左轮目标速度和右轮目标速度,包括:
6.根据权利要求1所述的方法,其特征在于,基于所述当前线速度、所述左轮目标速度和右轮目标速度控制所述车辆运行,包括:
7.根据权利要求6所述的方法,其特征在于,获取所述车辆的当前角速度,包括:
8.根据权利要求1所述的方法,其特征在于,获取车辆的当前位置信息和当前线速度之前,所述方法还包括:
9.一种车辆的控制装置,其特征在于,所述装置包括:
10.一种电子设备,其特征在于,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的计算机可执行指令,所述处理器执行所述计算机可执行指令以实现权利要求1-8任一项所述的车辆的控制方法。
11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令在被处理器调用和执行时,所述计算机可执行指令促使处理器实现权利要求1-8任一项所述的车辆的控制方法。
技术总结
本发明提供了一种车辆的控制方法、装置、电子设备和可读存储介质。其中,方法包括:获取车辆的当前位置信息和当前线速度;基于当前位置信息、当前线速度和预先设置的车辆的目标位置信息确定车辆的目标线速度和目标角速度;基于目标线速度和目标角速度确定车辆的左轮目标速度和右轮目标速度;基于当前线速度、左轮目标速度和右轮目标速度控制车辆运行。无需在车辆上安装轮速传感器也可以准确控制车辆的移动,从而提高车辆控制的准确性。
技术研发人员:陈伟,陈广大,陈赢峰,范长杰,胡志鹏
受保护的技术使用者:网易(杭州)网络有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!