一种行走轮安装装置和机器人的制作方法
本发明涉及机器人,尤其是一种行走轮安装装置和机器人。
背景技术:
1、自主移动机器人用于对货物进行承载运输,在仓储物流行业应用较为普遍,自主移动机器人通常包括底盘,底盘上安装驱动轮和万向轮,电机驱动驱动轮转动以带动整个底盘行驶,电机、驱动轮通过安装于浮动架上,浮动架和底盘之间连接弹簧,可以保证浮动架能够随地形变化而上下浮动,但在浮动的过程中,驱动轮容易左右移动、打滑、发生磨损。
技术实现思路
1、本申请人针对上述现有生产技术中的缺点,提供一种行走轮安装装置和机器人。
2、本发明所采用的技术方案如下:一种行走轮安装装置,包括行走轮、轮安装架、限位架、杠杆组件和弹性组件,行走轮安装于轮安装架上, 杠杆组件的一端与弹性组件相连、另一端与轮安装架活动连接,轮安装架为可升降式,轮安装架和限位架构成升降导向配合。
3、作为上述技术方案的进一步改进:
4、所述杠杆组件包括中心轴和至少两个杠杆,所述行走轮安装装置还包括固定座,中心轴安装于固定座上,所有杠杆可转动式套设在中心轴上,杠杆的一端与弹性组件相连、另一端与轮安装架活动连接。
5、所述限位架包括两个间距布置的限位座,限位座上开设限位槽,轮安装架的两侧边缘延伸至限位槽中构成升降导向配合。
6、所述轮安装架上开设至少一个安插孔,所述杠杆的另一端可活动式安插至安插孔中。
7、所述弹性组件包括至少两个弹性单元,每个杠杆配备一个弹性单元,弹性单元包括底座、弹簧和连接组件,弹簧的一端安装在底座上、另一端通过连接组件和杠杆相连。
8、所述连接组件包括压盖、螺柱和至少一个螺母,螺柱固定于压盖上,弹簧的另一端抵靠在压盖上,杠杆的一端设有套筒,套筒内壁设有内螺纹,套筒套设在螺柱的外部并通过螺母锁住。
9、所述行走轮安装装置还包括驱动电机,驱动电机安装于轮安装架上,行走轮由驱动电机驱动。
10、一种机器人,包括多个行走轮安装装置,还包括底盘、门架和取放货组件,取放货组件通过门架安装于底盘上,所述行走轮安装装置设置于底盘中。
11、作为上述技术方案的进一步改进:
12、所述行走轮安装装置中的行走轮为底盘的驱动轮,驱动轮由驱动电机驱动,底盘上还安装多个万向轮。
13、所述取放货组件配置为在门架上可升降,所述门架配置为在底盘上可侧向伸出或缩回,所述行走轮安装装置为两个且分别为第一行走轮安装装置和第二行走轮安装装置,第一行走轮安装装置、第二行走轮安装装置沿着门架伸出方向间距布置,第一行走轮安装装置和第二行走轮安装装置分布在底盘回转中心的两侧。
14、第一行走轮安装装置中的行走轮到底盘回转中心的距离小于第二行走轮安装装置中的行走轮到底盘回转中心的距离。
15、所述底盘中设有压板,压板布置于邻近弹性组件所在端的杠杆组件的上方,压板中设置螺纹孔。
16、本发明的有益效果如下:本申请行走轮安装装置中,杠杆组件的一端由弹性组件顶起,利用杠杆原理,杠杆组件的另一端压住轮安装架,从而使行走轮始终贴紧地面,以适应地面的凹凸不平。其中,杠杆组件的端部和轮安装架活动连接,并且限位架对轮安装架的升降进行导向限位,使得轮安装架沿固定方向升降,不会发生横向偏移,即保证行走轮不会发生横向偏移,不会打滑,也不会发生磨损,行走轮使用寿命较长,采用行走轮安装装置的机器人行驶过程平稳可控。
技术特征:
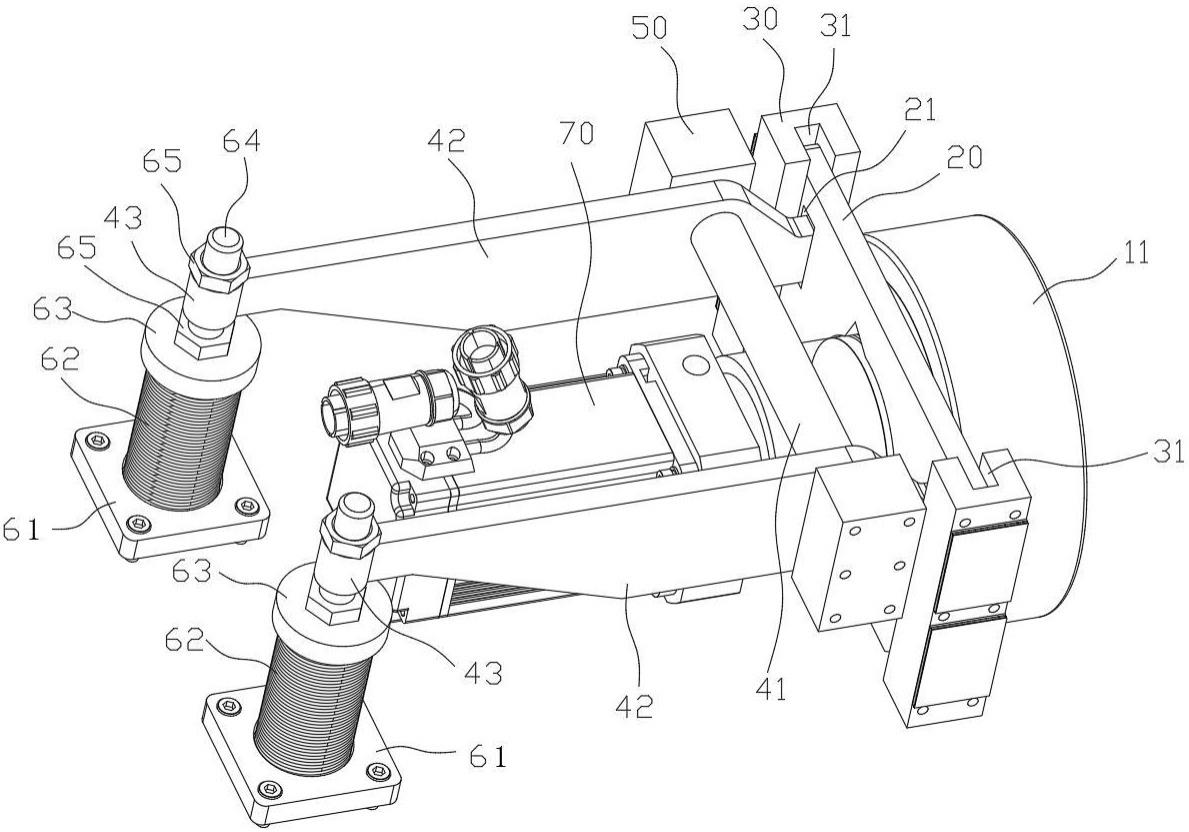
1.一种行走轮安装装置,其特征在于:包括行走轮、轮安装架(20)、限位架(30)、杠杆组件和弹性组件,行走轮安装于轮安装架(20)上, 杠杆组件的一端与弹性组件相连、另一端与轮安装架(20)活动连接,轮安装架(20)为可升降式,轮安装架(20)和限位架(30)构成升降导向配合。
2.如权利要求1所述的行走轮安装装置,其特征在于:所述杠杆组件包括中心轴(41)和至少两个杠杆(42),所述行走轮安装装置还包括固定座(50),中心轴(41)安装于固定座(50)上,所有杠杆(42)可转动式套设在中心轴(41)上,杠杆(42)的一端与弹性组件相连、另一端与轮安装架(20)活动连接。
3.如权利要求2所述的行走轮安装装置,其特征在于:所述限位架(30)包括两个间距布置的限位座,限位座上开设限位槽(31),轮安装架(20)的两侧边缘延伸至限位槽(31)中构成升降导向配合。
4.如权利要求2所述的行走轮安装装置,其特征在于:所述轮安装架(20)上开设至少一个安插孔(21),所述杠杆(42)的另一端可活动式安插至安插孔(21)中。
5.如权利要求2所述的行走轮安装装置,其特征在于:所述弹性组件包括至少两个弹性单元,每个杠杆(42)配备一个弹性单元,弹性单元包括底座(61)、弹簧(62)和连接组件,弹簧(62)的一端安装在底座(61)上、另一端通过连接组件和杠杆(42)相连。
6.如权利要求5所述的行走轮安装装置,其特征在于:所述连接组件包括压盖(63)、螺柱(64)和至少一个螺母(65),螺柱(64)固定于压盖(63)上,弹簧(62)的另一端抵靠在压盖(63)上,杠杆(42)的一端设有套筒(43),套筒(43)内壁设有内螺纹,套筒(43)套设在螺柱(64)的外部并通过螺母(65)锁住。
7.如权利要求1所述的行走轮安装装置,其特征在于:所述行走轮安装装置还包括驱动电机(70),驱动电机(70)安装于轮安装架(20)上,行走轮由驱动电机(70)驱动。
8.一种机器人,其特征在于:包括多个如权利要求1-7任一项所述行走轮安装装置,还包括底盘(80)、门架(90)和取放货组件(100),取放货组件(100)通过门架(90)安装于底盘(80)上,所述行走轮安装装置设置于底盘(80)中。
9.如权利要求8所述的机器人,其特征在于:所述行走轮安装装置中的行走轮为底盘(80)的驱动轮(11),驱动轮(11)由驱动电机(70)驱动,底盘(80)上还安装多个万向轮(12)。
10.如权利要求9所述的机器人,其特征在于:所述取放货组件(100)配置为在门架(90)上可升降,门架(90)配置为在底盘(80)上可侧向伸出或缩回,所述行走轮安装装置为两个且分别为第一行走轮安装装置(110)和第二行走轮安装装置(120),第一行走轮安装装置(110)、第二行走轮安装装置(120)沿着门架(90)伸出方向间距布置,第一行走轮安装装置(110)和第二行走轮安装装置(120)分布在底盘(80)回转中心的两侧。
11.如权利要求10所述的机器人,其特征在于:所述第一行走轮安装装置(110)中的行走轮到底盘(80)回转中心的距离小于第二行走轮安装装置(120)中的行走轮到底盘(80)回转中心的距离。
12.如权利要求8所述的机器人,其特征在于:所述底盘(80)中设有压板(81),压板(81)布置于邻近弹性组件所在端的杠杆组件的上方,压板(81)中设置螺纹孔(811)。
技术总结
本发明涉及机器人技术领域,尤其是一种行走轮安装装置和机器人,包括行走轮、轮安装架、限位架、杠杆组件和弹性组件,行走轮安装于轮安装架上,杠杆组件的一端与弹性组件相连、另一端与轮安装架活动连接,轮安装架为可升降式,轮安装架和限位架构成升降导向配合,本申请行走轮安装装置中,杠杆组件的一端由弹性组件顶起,杠杆组件的另一端压住轮安装架,使行走轮始终贴紧地面,以适应地面的凹凸不平,限位架对轮安装架的升降进行导向限位,使得轮安装架沿固定方向升降,不会发生横向偏移,即保证行走轮不会发生横向偏移,不会打滑,也不会发生磨损,行走轮使用寿命较长,采用行走轮安装装置的机器人行驶过程平稳可控。
技术研发人员:芮心刚,卢敬铭,沈鹭
受保护的技术使用者:浙江凯乐士科技集团股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!