一种自动驾驶汽车的车速精准控制方法及系统与流程
本发明涉及自动驾驶,具体而言,涉及一种自动驾驶汽车的车速精准控制方法及系统。
背景技术:
1、随着汽车技术的快速发展,自动驾驶技术得到了快速的发展,目前l2级别的驾驶辅助技术已经得到了较为广泛的应用,l3级别的驾驶辅助技术也在部分车型上得以应用。
2、车速控制是自动驾驶的重要内容,现有技术中自动驾驶车辆的车速控制主要是通过比对目标车速(即指令车速)与实测车速的差值进而输出速度修正指令来实现,然而,这种方式会导致车辆的车速控制难以快速达标,而且修正次数会较多,导致车速控制系统的算力大幅增加。
技术实现思路
1、为了解决上述背景技术中存在的技术问题,本发明提供了一种自动驾驶汽车的车速精准控制方法、系统、电子设备及计算机存储介质。
2、本发明的第一方面提供了一种自动驾驶汽车的车速精准控制方法,包括如下步骤:
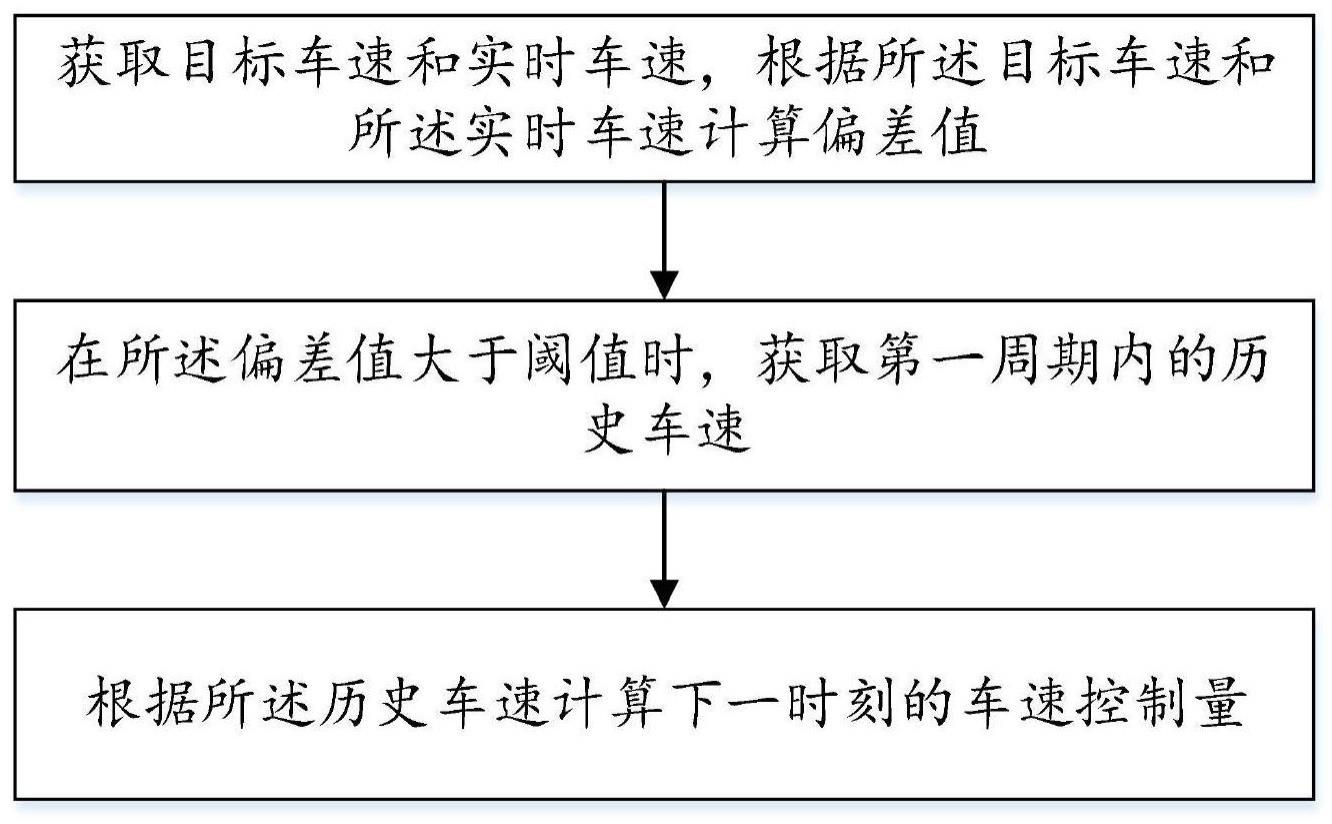
3、获取目标车速和实时车速,根据所述目标车速和所述实时车速计算偏差值;
4、在所述偏差值大于阈值时,获取第一周期内的历史车速;
5、根据所述历史车速计算下一时刻的车速控制量。
6、作为一种优选,在所述获取第一周期内的历史车速之前,还包括:
7、获取所述自动驾驶汽车的环境探测数据,根据所述环境探测数据确定行驶环境分类;
8、根据所述行驶环境分类确定所述阈值的大小。
9、作为一种优选,所述根据所述行驶环境分类确定所述阈值的大小,包括:
10、通过查表确定所述行驶环境分类对应的危险度值;
11、根据所述危险度值确定所述阈值的大小;
12、其中,所述阈值与所述危险度值成正比。
13、作为一种优选,所述第一周期的长度与所述阈值成正比。
14、作为一种优选,所述根据所述历史车速计算下一时刻的车速控制量,包括:
15、根据所述历史车速和目标车速计算得出若干历史偏差值;
16、根据所述历史偏差值计算得出等效偏差值;
17、根据所述等效偏差值修正所述车速控制量模型;
18、将所述实时车速和历史车速输入修正后的所述车速控制量模型,所述车速控制量模型输出所述车速控制量。
19、作为一种优选,所述根据所述等效偏差值修正所述车速控制量模型,包括:
20、对所述等效偏差值进行处理,以得到修正微分项;
21、将所述车速控制量模型中的微分项替换为所述修正微分项。
22、作为一种优选,所述等效偏差值通过下式计算得出:
23、
24、式中,为等效偏差值,e(t-n)为第t-n个历史数据的偏差值,n为历史车速的个数;
25、所述修正微分项为:
26、
27、
28、式中,为修正微分项,t为对应于历史数据的采样的时间序号的最大值,γn为调节系数,根据第一周期的长度和历史车速的个数确定;
29、所述修正后的所述车速控制量模型为:
30、
31、式中,kp为比例系数,ki为积分系数,kd为微分系数,t为积分时间长度。
32、本发明的第二方面提供了一种自动驾驶汽车的车速精准控制系统,包括处理模块、存储模块、通信模块,所述处理模块与所述存储模块、所述通信模块连接;其中,
33、所述存储模块(102),用于存储可执行的计算机程序代码;
34、所述通信模块(103),用于获取目标车速和实时车速并传输给所述处理模块,并输出所述处理模块(101)输出的车速控制量;
35、所述处理模块,用于通过调用所述存储模块中的所述可执行的计算机程序代码,执行如前任一项所述的方法。
36、本发明的第三方面提供了一种电子设备,包括:
37、存储有可执行程序代码的存储器;
38、与所述存储器耦合的处理器;
39、所述处理器调用所述存储器中存储的所述可执行程序代码,执行如前任一项所述的方法。
40、本发明的第四方面提供了一种计算机存储介质,该存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如上任一项所述的方法。
41、本发明的方案,获取目标车速和实时车速,根据所述目标车速和所述实时车速计算偏差值;在所述偏差值大于阈值时,获取第一周期内的历史车速;根据所述历史车速计算下一时刻的车速控制量。本发明根据能够反映自动驾驶车辆对目标车速的实际执行情况的历史车速来确定出更为合理的车速控制量,使得目标车速和实时车速更为接近,从而避免了车速反复修正的问题。
技术特征:
1.一种自动驾驶汽车的车速精准控制方法,其特征在于,包括如下步骤:获取目标车速和实时车速,根据所述目标车速和所述实时车速计算偏差值;在所述偏差值大于阈值时,获取第一周期内的历史车速;根据所述历史车速计算下一时刻的车速控制量。
2.根据权利要求1所述的一种自动驾驶汽车的车速精准控制方法,其特征在于:在所述获取第一周期内的历史车速之前,还包括:获取所述自动驾驶汽车的环境探测数据,根据所述环境探测数据确定行驶环境分类;根据所述行驶环境分类确定所述阈值的大小。
3.根据权利要求2所述的一种自动驾驶汽车的车速精准控制方法,其特征在于:所述根据所述行驶环境分类确定所述阈值的大小,包括:通过查表确定所述行驶环境分类对应的危险度值;根据所述危险度值确定所述阈值的大小;其中,所述阈值与所述危险度值成正比。
4.根据权利要求3所述的一种自动驾驶汽车的车速精准控制方法,其特征在于:所述第一周期的长度与所述阈值成正比。
5.根据权利要求1或4所述的一种自动驾驶汽车的车速精准控制方法,其特征在于:所述根据所述历史车速计算下一时刻的车速控制量,包括:根据所述历史车速和目标车速计算得出若干历史偏差值;根据所述历史偏差值计算得出等效偏差值;根据所述等效偏差值修正所述车速控制量模型;将所述实时车速和历史车速输入修正后的所述车速控制量模型,所述车速控制量模型输出所述车速控制量。
6.根据权利要求5所述的一种自动驾驶汽车的车速精准控制方法,其特征在于:所述根据所述等效偏差值修正所述车速控制量模型,包括:对所述等效偏差值进行处理,以得到修正微分项;将所述车速控制量模型中的微分项替换为所述修正微分项。
7.根据权利要求6所述的一种自动驾驶汽车的车速精准控制方法,其特征在于:所述等效偏差值通过下式计算得出:
8.一种自动驾驶汽车的车速精准控制系统,包括处理模块、存储模块、通信模块,所述处理模块与所述存储模块、所述通信模块连接;其中,所述存储模块(102),用于存储可执行的计算机程序代码;其特征在于:所述处理模块,用于通过调用所述存储模块中的所述可执行的计算机程序代码,执行如权利要求1-7任一项所述的方法。
9.一种电子设备,包括:存储有可执行程序代码的存储器;与所述存储器耦合的处理器;其特征在于:所述处理器调用所述存储器中存储的所述可执行程序代码,执行如权利要求1-7任一项所述的方法。
10.一种计算机存储介质,该存储介质上存储有计算机程序,其特征在于:该计算机程序被处理器运行时执行如权利要求1-7任一项所述的方法。
技术总结
本发明提供了一种自动驾驶汽车的车速精准控制方法及系统。其中,所述方法包括:获取目标车速和实时车速,根据所述目标车速和所述实时车速计算偏差值;在所述偏差值大于阈值时,获取第一周期内的历史车速;根据所述历史车速计算下一时刻的车速控制量;本发明根据能够反映自动驾驶车辆对目标车速的实际执行情况的历史车速来确定出更为合理的车速控制量,使得目标车速和实时车速更为接近,从而避免了车速反复修正的问题。
技术研发人员:俞陆祥
受保护的技术使用者:杭州期铭新能源科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!