使用多电池单元状态估计的电动化车辆控制的制作方法
本发明涉及根据在电池单元级估计的牵引电池的状态来控制电动化车辆的牵引电池。
背景技术:
1、一种电动化车辆包括用于提供动力以推进车辆的牵引电池。牵引电池由通常以阵列布置的电池单元组成。为了可维护性,存在移除具体阵列并用新阵列更换该阵列的技术。以这种方式,可更换一个或多个阵列而不是更换整个牵引电池。因此,牵引电池可变得由不同老化程度的电池单元阵列组成。
技术实现思路
1、一种对象包括用于牵引电池的控制策略,其中所述控制策略在检测牵引电池的状态(例如,荷电状态(soc)、健康状态(soh)和/或电力状态(sop))时考虑所述牵引电池的电池单元的阵列之间的寿命差异。
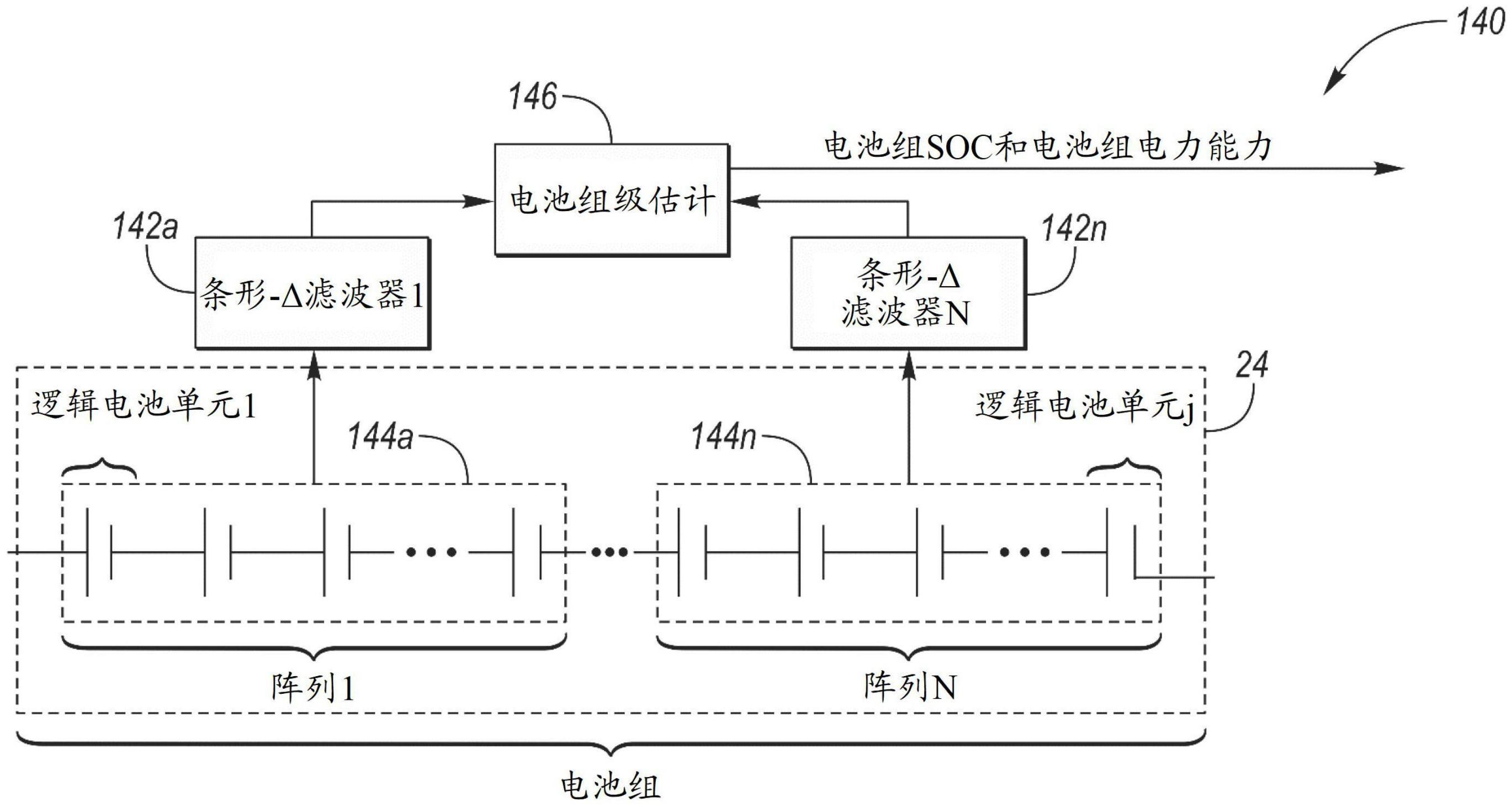
2、提供了一种具有牵引电池和控制器的系统。所述牵引电池包括电池单元的第一阵列和第二阵列。所述控制器被编程为实现第一条形-δ滤波器和第二条形-δ滤波器,所述滤波器被配置成分别从所述第一阵列和所述第二阵列的模型生成指示所述第一阵列和所述第二阵列的soc的输出。所述控制器还被编程为根据由所述第一阵列和所述第二阵列的所述soc限定的电力极限对所述牵引电池进行充电和/或放电。
3、所述第一条形-δ滤波器和所述第二条形-δ滤波器还被配置成分别从所述第一阵列和所述第二阵列的模型生成指示所述第一阵列和所述第二阵列的soh的输出。电力极限可由第一阵列和第二阵列的soh进一步限定。
4、所述第一条形-δ滤波器和所述第二条形-δ滤波器还被配置成分别从所述第一阵列和所述第二阵列的模型生成指示所述第一阵列和所述第二阵列的sop的输出。电力极限可由第一阵列和第二阵列的sop进一步限定。
5、牵引电池还可包括电池单元的第三阵列。在这种情况下,所述控制器还被编程为实现第三条形-δ滤波器,所述滤波器被配置成从所述第三阵列的模型生成指示所述第三阵列的soc的输出,并且根据由所述第一阵列、所述第二阵列和所述第三阵列的所述soc限定的电力极限对所述牵引电池进行充电和/或放电。
6、指示所述第一阵列的所述soc的输出可部分地基于第一阵列的电池单元的测量的平均电压与来自第一阵列的模型的电池单元的估计的平均电压的比较。
7、指示所述第一阵列的所述soc的输出还可部分地基于第一阵列的电池单元中的一个的测量的电压与来自第一阵列的模型的电池单元中的一个的估计的电压的比较。
8、响应于第一阵列的电池单元的测量的平均电压与来自第一阵列的模型的电池单元的估计的平均电压之间的第一差值,可根据所述第一差值更新所述第一条形-δ滤波器的条形滤波器部分的参数。响应于第一阵列的电池单元中的一个的测量的电压与来自第一阵列的模型的电池单元中的一个的估计的电压之间的第二差值,可根据所述第二差值更新所述第一条形-δ滤波器的δ滤波器部分的参数。来自第一阵列的模型的电池单元中的一个的估计的电压取决于所述第一条形-δ滤波器的条形滤波器部分的输出。
9、还提供了一种方法。所述方法包括经由第一条形-δ滤波器从牵引电池的电池单元的第一阵列的模型生成指示所述第一阵列的soc的输出,以及经由第二条形-δ滤波器从牵引电池的电池单元的第二阵列的模型生成指示所述第二阵列的soc的输出。所述方法还包括根据由所述第一阵列和所述第二阵列的soc限定的电力极限对牵引电池进行充电和/或放电。
10、还提供了一种包括控制器的汽车控制系统。所述控制器被编程为根据由牵引电池的电池单元的第一阵列和第二阵列中的每一个的soc限定的电力极限对所述牵引电池进行充电和/或放电,并且实现第一滤波器和第二滤波器,它们被配置成分别从第一阵列和第二阵列的模型生成指示所述第一阵列和所述第二阵列的soc的输出。所述滤波器中的一个可能是条形-δ滤波器,或者两个滤波器都可能是条形-δ滤波器。
技术特征:
1.一种系统,其包括:
2.如权利要求1所述的系统,其中:
3.如权利要求1所述的系统,其中:
4.如权利要求1所述的系统,其中:
5.如权利要求1所述的系统,其中:
6.如权利要求1所述的系统,其中:
7.如权利要求6所述的系统,其中:
8.如权利要求7所述的系统,其中:
9.如权利要求8所述的系统,其中:
10.一种方法,其包括:
11.如权利要求10所述的方法,其还包括:
12.如权利要求10所述的方法,其还包括:
13.如权利要求10所述的方法,其中:
14.一种汽车控制系统,其包括:
15.如权利要求14所述的汽车控制系统,其中:
技术总结
本公开提供了“使用多电池单元状态估计的电动化车辆控制”。一种系统包括牵引电池和控制器。所述牵引电池包括电池单元的第一阵列和第二阵列。所述控制器被编程为实现第一滤波器和第二滤波器,诸如第一条形‑Δ滤波器和第二条形‑Δ滤波器,所述滤波器被配置成分别从所述第一阵列和所述第二阵列的模型生成指示所述第一阵列和所述第二阵列的荷电状态(SOC)的输出。所述控制器还被编程为根据由所述第一阵列和所述第二阵列的所述SOC限定的电力极限对所述牵引电池进行充电和/或放电。
技术研发人员:M·阿罗约泽维尔,J·T·休斯
受保护的技术使用者:福特全球技术公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!