自适应远光灯控制方法、车辆及计算机可读存储介质与流程
本发明涉及车辆辅助驾驶,特别涉及一种自适应远光灯控制方法、车辆及计算机可读存储介质。
背景技术:
1、随着用户对新功能不断的追求,以及为顾客提供更安全的照明性能的需求,目前许多车型开始逐步搭载自适应远光灯。为避免对向车辆驾驶员产生炫目,自适应远光灯需要在对向车辆区域取消远光灯照明。
2、然而,目前现有技术中,自适应远光灯的对向车辆检测大多基于平面检测,导致目前光线照明无法达到最大区域,因此无法提供最大限度的照明,影响驾驶体验,存在风险隐患。
技术实现思路
1、本发明的主要目的是提供一种自适应远光灯控制方法、车辆及计算机可读存储介质,旨在解决现有技术中自适应远光灯的对向车辆检测大多基于平面检测,导致目前光线照明无法达到最大区域,因此无法提供最大限度的照明,影响驾驶体验,存在风险隐患问题。
2、为实现上述目的,本发明提出一种自适应远光灯控制方法,所述自适应远光灯控制方法包括:
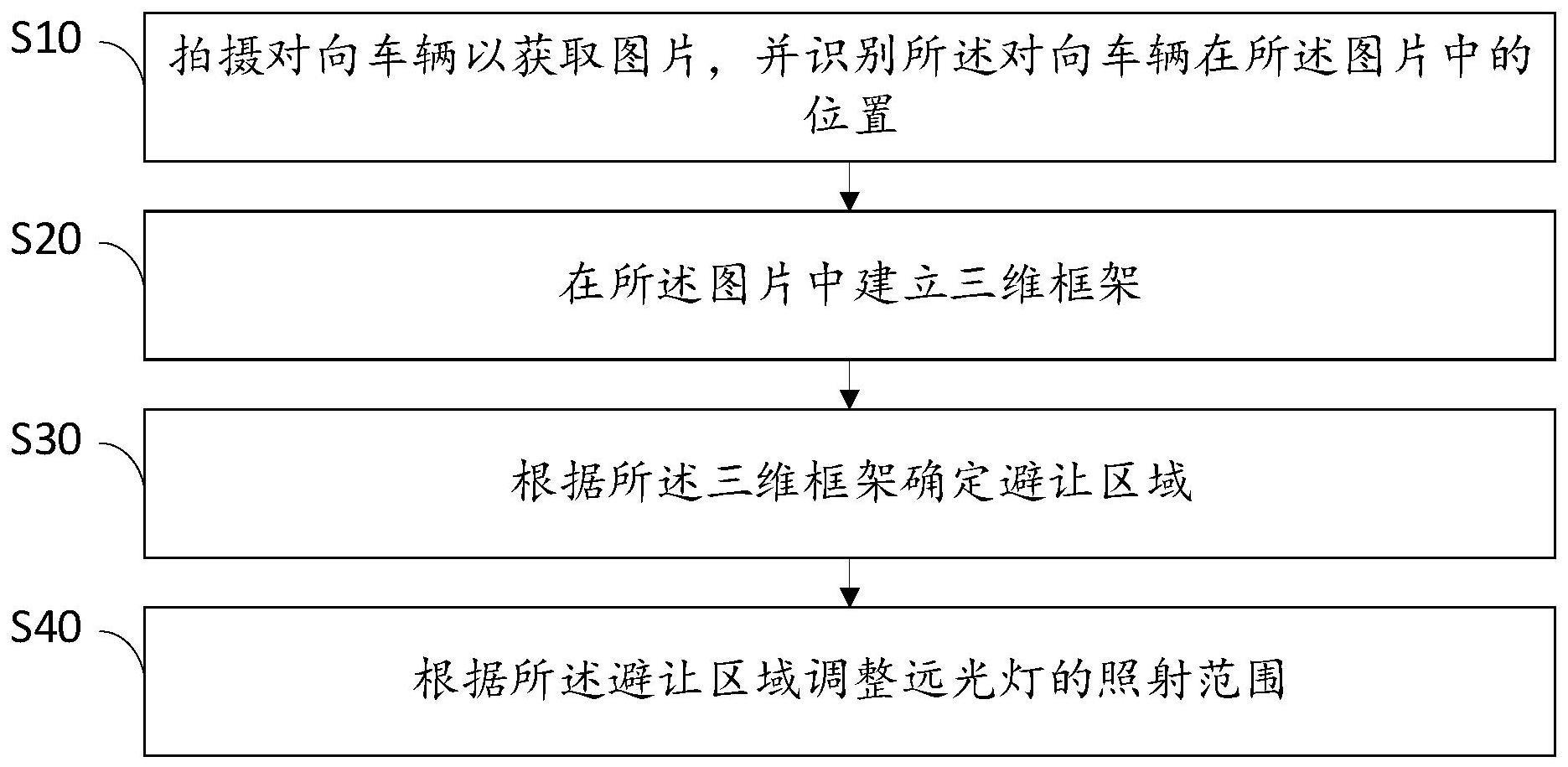
3、拍摄对向车辆以获取图片,并识别所述对向车辆在所述图片中的位置;
4、在所述图片中建立三维框架,其中,所述三维框架的位置与所述对向车辆在所述图片中的位置相对应;
5、根据所述三维框架确定避让区域;
6、根据所述避让区域调整远光灯的照射范围。
7、可选地,在所述图片中建立三维框架的步骤包括:
8、获取所述对向车辆在所述图片中的尺寸信息;
9、根据所述尺寸信息生成对应的所述三维框架;
10、将所述三维框架显示在所述对向车辆位于所述图片中的位置处,以使所述三维框架包绕在所述对向车辆的外围。
11、可选地,所述三维框架为长方体,根据所述三维框架确定避让区域的步骤包括:
12、建立三维坐标系,其中,所述坐标系的x轴与所述对向车辆的长度方向一致,y轴与所述对向车辆的宽度方向一致,z轴与所述对向车辆的高度方向一致;
13、获取所述三维框架上第一顶点的第一坐标值,以及第二顶点的第二坐标值,其中,所述第一顶点与所述第二顶点的连线与所述y轴一致;
14、根据所述第一坐标值以及所述第二坐标值确定所述避让区域。
15、可选地,根据所述第一坐标值以及所述第二坐标值确定所述避让区域的步骤包括:
16、根据所述第一坐标值获取第一y轴数值;
17、根据所述第二坐标值获取第二y轴数值;
18、根据所述第一y轴数值与所述第二y轴数值确定所述避让区域。
19、可选地,所述远光灯内具有多个沿所述y轴间隔设置的灯珠;根据所述避让区域调整远光灯的照射范围的步骤包括:
20、获取所述灯珠对应的子光照范围;
21、判断所述子光照范围是否与所述避让区域重叠;
22、当所述子光照范围与所述避让区域重叠时,将所述子光照范围对应的所述灯珠关闭,以调整所述远光灯的照射范围。
23、可选地,获取每个所述灯珠对应的子光照范围的步骤包括:
24、定义所述灯珠的照射范围在所述y轴方向上的边界值分别为第三y轴数值及第四y轴数值;
25、根据所述第三y轴数值与所述第四y轴数值确定所述子光照范围;
26、判断所述子光照范围是否与所述避让区域重叠的步骤包括:
27、判断所述第三y轴数值是否大于所述第一y轴数值且小于所述第二y轴数值;或者判断所述第四y轴数值是否大于所述第一y轴数值且小于所述第二y轴数值;
28、当所述第三y轴数值大于所述第一y轴数值且小于所述第二y轴数值时;或者所述第四y轴数值大于所述第一y轴数值且小于所述第二y轴数值时,确定所述子光照范围与所述避让区域重叠。
29、可选地,获取对向车辆的图片,并识别所述对向车辆在所述图片中的位置的步骤之前,还包括:
30、建立数学模型,将预设图片导入至所述数学模型中学习,以获取所述数学模型的特征参数。
31、在所述图片中建立三维框架的步骤包括:
32、通过所述数学模型以及所述特征参数在所述图片中建立三维框架。
33、可选地,获取对向车辆的图片,并识别所述对向车辆在所述图片中的位置的步骤之前,还包括:
34、获取远光灯的工作模式;
35、当所述工作模式为自适应模式时,执行获取对向车辆的图片的步骤。
36、此外,为解决上述问题,本发明还提出了一种车辆,所述车辆包括摄像头、远光灯、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的自适应远光灯控制程序,其中:
37、所述摄像头用于拍摄对向车辆以获取图片;
38、所述自适应远光灯控制程序被所述处理器执行时实现如上述的自适应远光灯控制方法的步骤。
39、此外,为解决上述问题,本发明还提出了一种计算机可读存储介质,所述计算机可读存储介质上存储有自适应远光灯控制程序,所述自适应远光灯控制程序被处理器执行时实现如上述的自适应远光灯控制方法的步骤。
40、本发明技术方案拍摄对向车辆的图片,并通过图片分析的方式,在该图片上建立所述三维框架,从而通过三维立体的方式对对向车辆进行检测,以正确识别对向车辆的所述避让区域。在避免远光灯照射对向车辆的前提下,提供最大限度的照明范围,提高驾驶体验。
技术特征:
1.一种自适应远光灯控制方法,其特征在于,所述自适应远光灯控制方法包括:
2.根据权利要求1所述的自适应远光灯控制方法,其特征在于,在所述图片中建立三维框架的步骤包括:
3.根据权利要求1所述的自适应远光灯控制方法,其特征在于,所述三维框架为长方体,根据所述三维框架确定避让区域的步骤包括:
4.根据权利要求3所述的自适应远光灯控制方法,其特征在于,根据所述第一坐标值以及所述第二坐标值确定所述避让区域的步骤包括:
5.根据权利要求4所述的自适应远光灯控制方法,其特征在于,所述远光灯内具有多个沿所述y轴间隔设置的灯珠;根据所述避让区域调整远光灯的照射范围的步骤包括:
6.根据权利要求5的自适应远光灯控制方法,其特征在于,获取每个所述灯珠对应的子光照范围的步骤包括:
7.根据权利要求1~5中任一项所述的自适应远光灯控制方法,其特征在于,获取对向车辆的图片,并识别所述对向车辆在所述图片中的位置的步骤之前,还包括:
8.根据权利要求1~5中任一项所述的自适应远光灯控制方法,其特征在于,获取对向车辆的图片,并识别所述对向车辆在所述图片中的位置的步骤之前,还包括:
9.一种车辆,其特征在于,所述车辆包括摄像头、远光灯、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的自适应远光灯控制程序,其中:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有自适应远光灯控制程序,所述自适应远光灯控制程序被处理器执行时实现如权利要求1至8中任一项所述的自适应远光灯控制方法的步骤。
技术总结
本发明提供了一种自适应远光灯控制方法、车辆及计算机可读存储介质,所述自适应远光灯控制方法包括拍摄对向车辆以获取图片,并识别所述对向车辆在所述图片中的位置;在所述图片中建立三维框架,其中,所述三维框架的位置与所述对向车辆在所述图片中的位置相对应;根据所述三维框架确定避让区域;根据所述避让区域调整远光灯的照射范围。本发明技术方案拍摄对向车辆的图片,并通过图片分析的方式,在该图片上建立所述三维框架,从而通过三维立体的方式对对向车辆进行检测,以正确识别对向车辆的所述避让区域。在避免远光灯照射对向车辆的前提下,提供最大限度的照明范围,提高驾驶体验。
技术研发人员:田轩屹
受保护的技术使用者:广汽丰田汽车有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!