预测轨迹的生成方法及其装置、控制器、介质及移动设备与流程
本申请涉及自动驾驶,尤其涉及一种预测轨迹的生成方法及其装置、控制器、介质及移动设备。
背景技术:
1、自动驾驶系统通常包括预测模块以及规划模块等功能模块,规划模块需要预测模块输出的关于环境中各个障碍物在未来一定时间范围内的预测轨迹作为数据基础。
2、预测模块会采用多条轨迹或者轨迹点的高斯不确定性来保证预测的多样性,从而保证规划模块的稳定运行。
3、相关技术中,可以在已有预测轨迹和每个预测轨迹点的高斯分布的基础上,将其映射到栅格地图上,然后计算出每个栅格的概率,输出至规划模块使用。
4、但是,栅格化处理不会生成完整的预测轨迹,且会受到栅格地图的精度限制,无法准确反映出实际的运动轨迹,从而影响路径规划和决策的准确性。
技术实现思路
1、为克服相关技术中存在的问题,本申请提供一种预测轨迹的生成方法及其装置、控制器、介质及移动设备,能够不受栅格地图精度的限制的前提下增加预测轨迹的多样性。
2、本申请第一方面提供一种预测轨迹的生成方法,包括:
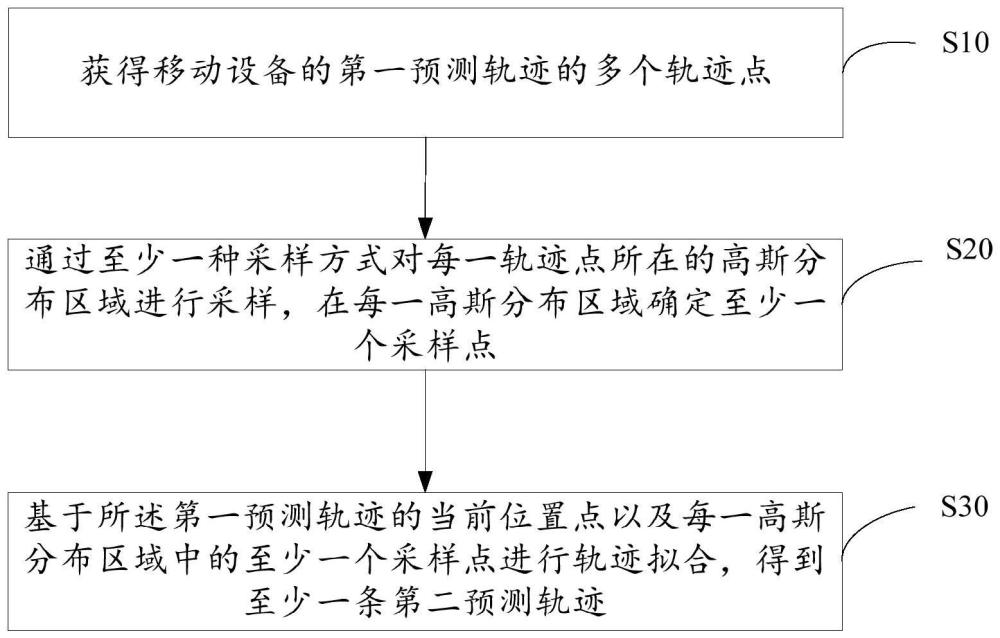
3、获得移动设备的第一预测轨迹的多个轨迹点;
4、通过至少一种采样方式对每一轨迹点所在的高斯分布区域进行采样,在每一高斯分布区域确定至少一个采样点;
5、基于所述第一预测轨迹的当前位置点以及每一高斯分布区域中的至少一个采样点进行轨迹拟合,得到至少一条第二预测轨迹;其中,任意一条第二预测轨迹中各个采样点的采样方式相同。
6、本申请第二方面提供一种预测轨迹的生成装置,包括:
7、获得模块,用于获得移动设备的第一预测轨迹的多个轨迹点;
8、采样模块,用于通过至少一种采样方式对每一轨迹点所在的高斯分布区域进行采样,在每一高斯分布区域确定至少一个采样点;
9、生成模块,用于基于所述第一预测轨迹的当前位置点以及每一高斯分布区域中的至少一个采样点进行轨迹拟合,得到至少一条第二预测轨迹;其中,任意一条第二预测轨迹中各个采样点的采样方式相同。
10、本申请第三方面提供一种控制器,包括:
11、处理器;以及
12、存储器,其上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行如上所述的一种预测轨迹的生成方法。
13、本申请第四方面提供一种非暂时性机器可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如上所述的一种预测轨迹的生成方法。
14、本申请第五方面提供一种移动设备,包括上述的控制器。
15、本申请提供的技术方案可以包括以下有益效果:
16、本申请技术方案提供一种预测轨迹的生成方法及其装置、控制器、介质及移动设备,所述生成方法首先获得移动设备的第一预测轨迹的多个轨迹点;然后通过至少一种采样方式对每一轨迹点所在的高斯分布区域进行采样,在每一高斯分布区域确定至少一个采样点;最后基于所述第一预测轨迹的当前位置点以及每一高斯分布区域中的至少一个采样点进行轨迹拟合,得到至少一条第二预测轨迹;其中,任意一条第二预测轨迹中各个采样点的采样方式相同。可见,利用第一预测轨迹中的多个轨迹点在表征不确定性信息的高斯分布区域内采样出多个采样点,并拟合成至少一条第二预测轨迹,无需依靠栅格地图,在符合移动设备的实际运动轨迹的前提下,增加了预测轨迹的多样性。
17、还能够对第二预测轨迹进行符合运动学约束的边界筛选,保证了运动状态的合理性。
18、还能够通过多种采样方式,保证第二预测轨迹的多样性和可解释性。
19、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种预测轨迹的生成方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,还包括:
3.根据权利要求2所述的方法,其特征在于,还包括:
4.根据权利要求1所述的方法,其特征在于,所述通过至少一种采样方式对每一轨迹点所在的高斯分布区域进行采样,在每一高斯分布区域确定至少一个采样点,包括:
5.根据权利要求4所述的方法,其特征在于,所述基于每一轨迹点的位置确定每一轨迹点所在的高斯分布区域的采样线,包括:
6.根据权利要求4所述的方法,其特征在于,所述基于每一轨迹点的位置确定每一轨迹点所在的高斯分布区域的采样线,包括:
7.根据权利要求4所述的方法,其特征在于,所述基于比例系数在每一所述采样线中确定每一高斯分布区域中的至少一个采样点,包括:
8.根据权利要求1所述的方法,其特征在于,所述获得移动设备的第一预测轨迹的多个轨迹点,包括:
9.根据权利要求3所述的方法,其特征在于,所述计算所述第二预测轨迹簇中各条第二预测轨迹的概率值,包括:
10.一种预测轨迹的生成装置,其特征在于,包括:
11.一种控制器,其特征在于,包括:
12.一种非暂时性机器可读存储介质,其特征在于,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如权利要求1-9中任一项所述的预测轨迹的生成方法。
13.一种移动设备,其特征在于,包括权利要求11所述的控制器。
技术总结
本申请属于自动驾驶技术领域,提供一种预测轨迹的生成方法及其装置、控制器、介质及移动设备,所述生成方法首先获得移动设备的第一预测轨迹的多个轨迹点;然后通过至少一种采样方式对每一轨迹点所在的高斯分布区域进行采样,在每一高斯分布区域确定至少一个采样点;最后基于所述第一预测轨迹的当前位置点以及每一高斯分布区域中的至少一个采样点进行轨迹拟合,得到至少一条第二预测轨迹。因此,本申请能够利用第一预测轨迹中的多个轨迹点在表征不确定性信息的高斯分布区域内采样出多个采样点,并拟合成至少一条第二预测轨迹,无需依靠栅格地图,在符合移动设备的实际运动轨迹的前提下,增加了预测轨迹的多样性。
技术研发人员:张富强
受保护的技术使用者:合肥智行者科技有限公司
技术研发日:
技术公布日:2024/11/7
- 还没有人留言评论。精彩留言会获得点赞!