行车辅助控制方法、系统、电子设备及存储介质与流程
本发明涉及辅助驾驶,具体而言,涉及一种行车辅助控制方法、系统、电子设备及存储介质。
背景技术:
1、目前l2以及l2以上的自动驾驶辅助系统在主流汽车上应用广泛,能够实现自适应巡航(acc),车道保持(lka)等功能。这些功能的安全实现基于传感器能准确对周围环境的变化的感知。
2、目前在自动驾驶辅助系统常用的传感器包括摄像头、毫米波雷达和超声波雷达,但是这些传感器会极大的受到环境因素的影响,例如:黑夜、雨天、雾天等环境会极大影响摄像头的拍摄效果,而温度等因素则会影响雷达信号的传播速度,进而对车辆的驾驶安全性造成了一定的影响。目前,尚无适用于恶劣天气的汽车驾驶辅助方法。
技术实现思路
1、为了解决上述技术问题,本申请实施例提供了一种行车辅助控制方法、装置、电子设备及存储介质。
2、第一方面,本申请实施例提供了一种行车辅助控制方法,应用于行车辅助控制系统,所述行车辅助控制系统包括多个环境传感器,所述方法包括:
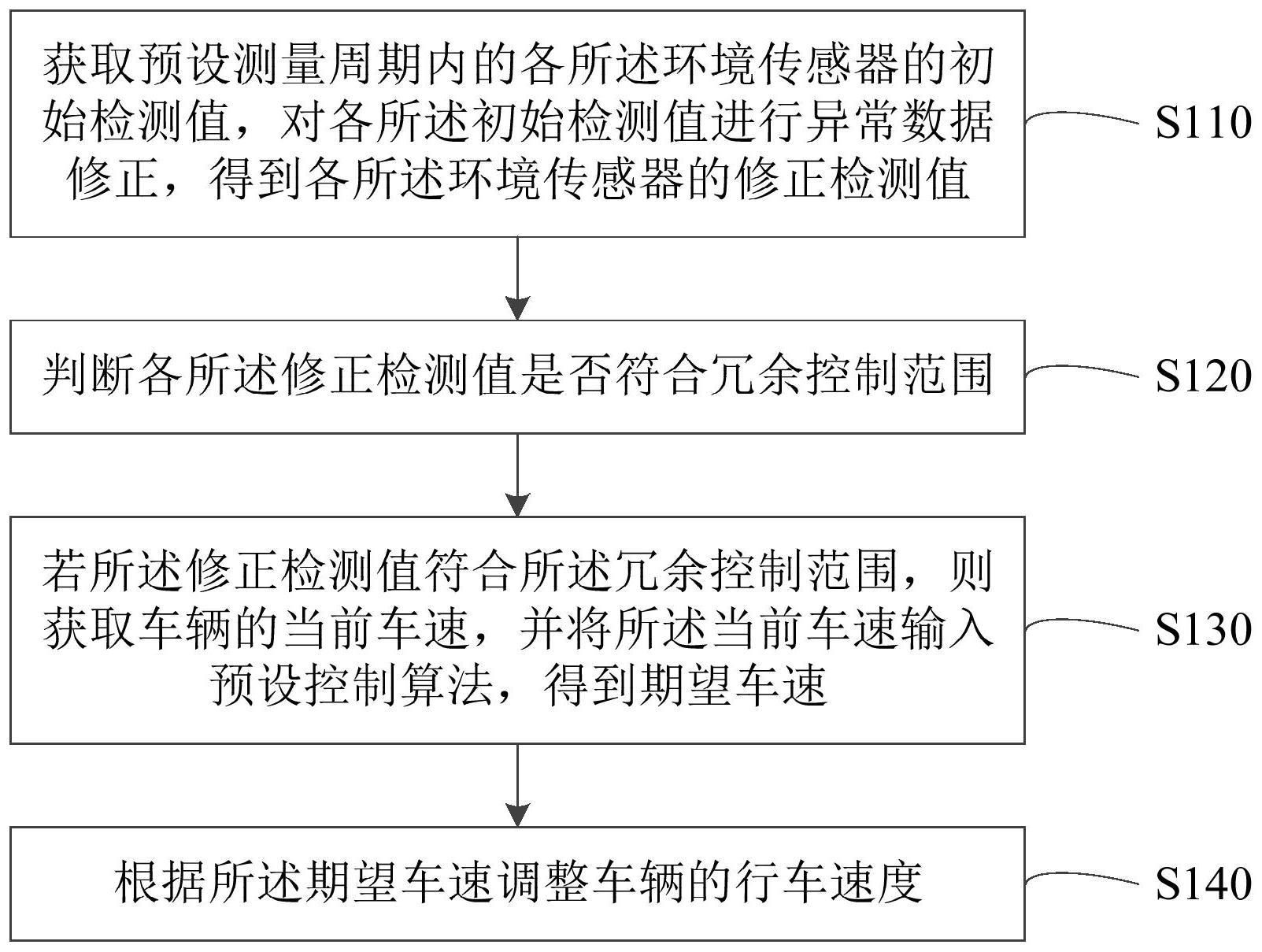
3、获取预设测量周期内的各所述环境传感器的初始检测值,对各所述初始检测值进行异常数据修正,得到各所述环境传感器的修正检测值;
4、判断各所述修正检测值是否符合冗余控制范围;
5、若所述修正检测值符合所述冗余控制范围,则获取车辆的当前车速,并将所述当前车速输入预设控制算法,得到期望车速;
6、根据所述期望车速调整车辆的行车速度。
7、在一实施方式中,所述预设测量周期包括多个采样周期,所述初始检测值为各所述采样周期传回的数据的集合,所述获取预设测量周期内的各所述环境传感器的初始检测值,对各所述初始检测值进行异常数据修正,得到各所述环境传感器的修正检测值,包括:
8、判断当前采样周期传回的数据是否符合预设有效范围,若符合,则确定所述当前采样周期传回的数据为有效数据;
9、若所述当前采样周期传回的数据为有效数据,则计算下一采样周期传回的数据相对于所述当前采样周期传回的数据的波动幅度;
10、若所述波动幅度小于预设波动阈值,则确定所述下一采样周期传回的数据为有效数据;
11、计算一个预设测量周期内全部所述有效数据的平均值,得到所述修正检测值。
12、在一实施方式中,多个所述传感器包括光线传感器、温度传感器和雨量传感器,所述修正检测值包括对应光线传感器的第一修正检测值、对应温度传感器的第二修正检测值和对应雨量传感器的第三修正检测值,所述冗余控制范围包括摄像头冗余控制范围、超声波雷达冗余控制范围和毫米波雷达冗余控制范围。
13、在一实施方式中,所述预设控制算法包括二维标定表,所述若所述修正检测值符合所述冗余控制范围,则获取车辆的当前车速,并将所述当前车速输入预设控制算法,得到期望车速,包括:
14、若所述第一修正检测值和所述第二修正检测值符合所述摄像头冗余控制范围,则将所述当前车速输入所述二维标定表,得到对应的期望车速;其中,所述二维标定表由历史实验数据得到。
15、在一实施方式中,所述预设控制算法还包括第一一维标定表,所述若所述修正检测值符合所述冗余控制范围,则获取车辆的当前车速,并将所述当前车速输入预设控制算法,得到期望车速,包括:
16、若所述第二修正检测值符合所述超声波雷达冗余控制范围,则将所述当前车速输入所述第一一维标定表,得到对应的期望车速;其中,所述第一一维标定表由历史实验数据得到。
17、在一实施方式中,所述预设控制算法还包括第二一维标定表,所述若所述修正检测值符合所述冗余控制范围,则获取车辆的当前车速,并将所述当前车速输入预设控制算法,得到期望车速,包括:
18、若所述第三修正检测值符合所述毫米波雷达冗余控制范围,则将所述当前车速输入所述第二一维标定表,得到对应的期望车速;其中,所述第二一维标定表由历史实验数据得到。
19、在一实施方式中,所述方法还包括:若所述期望车速存在多个值,则将所述期望车速中的最小值作为最终输出的期望车速。
20、第二方面,本申请实施例提供了一种行车辅助控制装置,所述行车辅助控制系统包括:
21、修正模块,用于获取预设测量周期内的各所述环境传感器的初始检测值,对各所述初始检测值进行异常数据修正,得到各所述环境传感器的修正检测值;
22、判断模块,用于判断各所述修正检测值是否符合冗余控制范围;
23、输入模块,用于若所述修正检测值符合所述冗余控制范围,则获取车辆的当前车速,并将所述当前车速输入预设控制算法,得到期望车速;
24、调整模块,用于根据所述期望车速调整车辆的行车速度。
25、第三方面,本申请实施例提供了一种电子设备,包括存储器以及处理器,所述存储器用于存储计算机程序,所述计算机程序在所述处理器运行时执行第一方面提供的行车辅助控制方法。
26、第四方面,本申请实施例提供了一种计算机可读存储介质,其存储有计算机程序,所述计算机程序在处理器上运行时执行第一方面提供的行车辅助控制方法。
27、上述本申请提供的行车辅助控制方法,通过多种传感器感知环境因素,并根据环境因素调整车速,来控制车辆的主动降速或者制动,提高了车辆行驶的安全性。
技术特征:
1.一种行车辅助控制方法,其特征在于,应用于行车辅助控制系统,所述行车辅助控制系统包括多个环境传感器,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述预设测量周期包括多个采样周期,所述初始检测值为各所述采样周期传回的数据的集合,所述获取预设测量周期内的各所述环境传感器的初始检测值,对各所述初始检测值进行异常数据修正,得到各所述环境传感器的修正检测值,包括:
3.根据权利要求1所述的方法,其特征在于,多个所述环境传感器包括光线传感器、温度传感器和雨量传感器,所述修正检测值包括对应光线传感器的第一修正检测值、对应温度传感器的第二修正检测值和对应雨量传感器的第三修正检测值,所述冗余控制范围包括摄像头冗余控制范围、超声波雷达冗余控制范围和毫米波雷达冗余控制范围。
4.根据权利要求3所述的方法,其特征在于,所述预设控制算法包括二维标定表,所述若所述修正检测值符合所述冗余控制范围,则获取车辆的当前车速,并将所述当前车速输入预设控制算法,得到期望车速,包括:
5.根据权利要求3所述的方法,其特征在于,所述预设控制算法还包括第一一维标定表,所述若所述修正检测值符合所述冗余控制范围,则获取车辆的当前车速,并将所述当前车速输入预设控制算法,得到期望车速,包括:
6.根据权利要求3所述的方法,其特征在于,所述预设控制算法还包括第二一维标定表,所述若所述修正检测值符合所述冗余控制范围,则获取车辆的当前车速,并将所述当前车速输入预设控制算法,得到期望车速,包括:
7.根据权利要求4-6任一项所述的方法,其特征在于,所述方法还包括:若所述期望车速存在多个值,则将所述期望车速中的最小值作为最终输出的期望车速。
8.一种行车辅助控制系统,其特征在于,所述行车辅助控制系统包括:
9.一种电子设备,其特征在于,包括存储器以及处理器,所述存储器存储有计算机程序,所述计算机程序在所述处理器运行时执行权利要求1至7中任一项所述的行车辅助控制方法。
10.一种计算机可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序在处理器上运行时执行权利要求1至7中任一项所述的行车辅助控制方法。
技术总结
本发明实施例提供了一种行车辅助控制方法、系统、电子设备及存储介质,涉及辅助驾驶技术领域,所述方法包括:获取预设测量周期内的各所述传感器的初始检测值,对各所述初始检测值进行异常数据修正,得到各所述环境传感器的修正检测值;判断各所述修正检测值是否符合冗余控制范围;若所述修正检测值符合所述冗余控制范围,则获取车辆的当前车速,将所述当前车速输入预设控制算法,得到期望车速;根据所述期望车速调整车辆的行车速度。本申请提供的行车辅助控制方法,通过多种传感器感知环境因素,并根据环境因素调整车速,来控制车辆的主动降速或者制动,提高了车辆行驶的安全性。
技术研发人员:彭炳顺,何天翼
受保护的技术使用者:北斗星通智联科技有限责任公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!