用于控制电机的损耗模式的方法和系统与流程
本说明书涉及用于操作混合动力车辆的电机的方法和系统。
背景技术:
1、电动车辆和混合动力车辆包括用于推进的电驱动系统。电驱动系统可以包括电机,所述电机作为马达操作以向传动系提供正扭矩。替代地,电机可以以发电机模式操作以产生电力。当电机以发电机模式操作时,电机可以向电能存储装置提供电力和/或向电力消耗器供电。由电机生成的电功率量可以是请求的制动扭矩、电能存储装置荷电状态、电机温度、电能存储装置温度和其他车辆工况的函数。可能期望在电机以发电机模式操作时以峰值效率操作电机,使得更大量的车辆动能可以转换成电能并且存储在电能存储装置中。然而,有时可能会请求电机以再生制动模式操作并且使车辆以电机可以生成可能无法存储在电能存储装置内的足够电荷的速率减速。另外,可能期望电驱动系统在提供期望水平的再生制动的同时减少电能存储装置充电的置信度水平增加。
技术实现思路
1、本文的发明人已经认识到上述问题并且已经开发了一种用于操作电驱动系统的方法,所述方法包括:经由控制器生成用于电驱动系统的额外操作功率损耗命令;并且响应于闭环额外操作功率损耗误差而调整电驱动系统的操作。
2、通过生成用于电驱动系统的额外操作功率损耗命令并且响应于闭环额外操作功率损耗误差量而调整电驱动系统的操作,可以提供提供可重复且准确的功率损耗的技术结果,使得可以提供期望水平的电机充电和再生制动。具体地,可以估计实际系统功率损耗,并且可以应用实际系统功率损耗作为反馈以生成操作功率损耗误差。可以应用操作功率损耗误差来调整电驱动系统电流,使得电驱动系统效率允许电驱动系统满足充电和再生制动要求。
3、本说明书可提供若干优点。具体地,所述方法可以允许电驱动系统提供对系统损耗的更准确的控制,使得可以改善电能存储装置充电。此外,所述方法可以在提供期望水平的电能存储装置充电的同时允许期望水平的再生制动。另外,对电驱动系统损耗的闭环控制可以补偿在宽范围的工况下可能难以量化的温度和转子损耗变化。
4、当单独地或结合附图来理解时,根据以下具体实施方式,将容易明白本说明书的以上优点和其他优点以及特征。
5、提供以上
技术实现要素:
是为了以简化的形式介绍在具体实施方式中进一步描述的一系列概念。其并不意味着确定所要求保护的主题的关键或必要特征,主题的范围由具体实施方式之后的权利要求唯一地限定。此外,所要求保护的主题不限于解决上文或本公开的任何部分中提及的任何缺点的实施方式。
技术特征:
1.一种用于操作电驱动系统的方法,其包括:
2.如权利要求1所述的方法,其中经由从所述额外操作功率损耗命令中减去估计的实际额外操作功率损耗来生成所述闭环额外操作功率损耗误差。
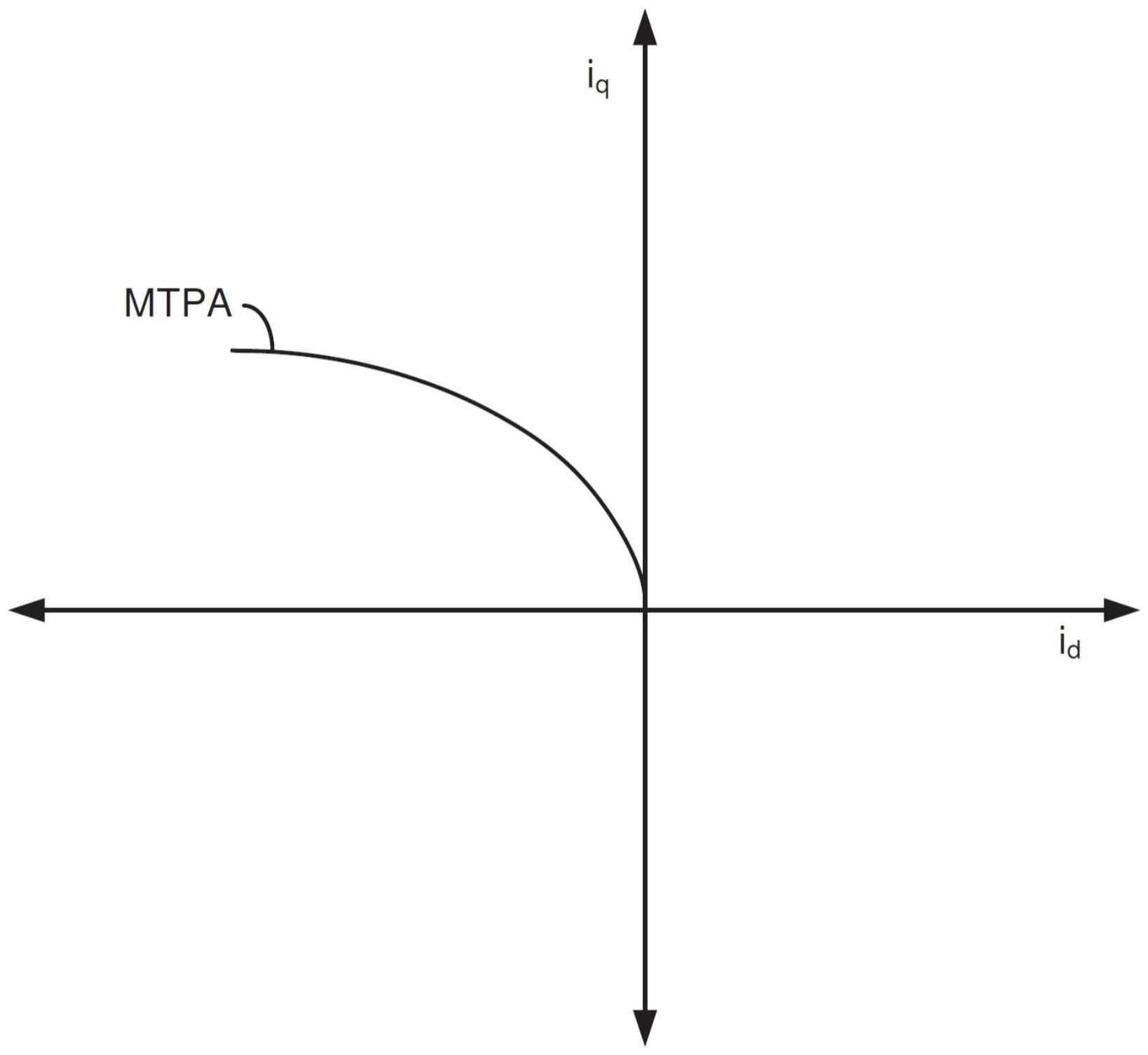
3.如权利要求1所述的方法,其中调整所述电驱动系统的操作包括经由正交电流命令和直流电流命令来命令所述电驱动系统。
4.如权利要求1所述的方法,其还包括对所述闭环额外操作功率损耗误差进行积分。
5.如权利要求1所述的方法,其中所述电驱动系统包括电机,并且所述方法还包括:
6.如权利要求5所述的方法,其还包括基于所述驱动系统功率损耗值来估计实际额外操作功率损耗。
7.如权利要求6所述的方法,其中经由从所述驱动系统功率损耗值中减去预期操作功率损耗值来生成所述实际额外操作功率损耗。
8.一种系统,其包括:
9.如权利要求8所述的系统,其中输入到所述驱动系统的所述电功率量与经由所述驱动系统生成的所述机械功率量之间的所述差值是驱动系统功率损耗值,并且所述系统还包括:
10.如权利要求9所述的系统,其中从所述驱动系统功率损耗值中减去所述预期驱动系统功率损耗值产生估计的实际额外操作功率损耗值,并且所述系统还包括:
11.如权利要求8所述的系统,其中所述额外操作功率损耗命令值是基于请求的制动扭矩和电能存储装置的充电功率极限。
12.如权利要求8所述的系统,其还包括电流传感器和用于进行以下操作的附加指令:估计输入到所述驱动系统的所述电功率量。
13.如权利要求8所述的系统,其还包括用于进行以下操作的附加指令:基于所述额外操作功率损耗命令值与估计的实际额外操作功率损耗值之间的差值来估计正交电流。
14.如权利要求8所述的系统,其还包括用于进行以下操作的附加指令:基于所述额外操作功率损耗命令值与估计的实际额外操作功率损耗值之间的差值来估计直流电流。
15.如权利要求14所述的系统,其中所述直流电流是磁通电流。
技术总结
本公开提供“用于控制电机的损耗模式的方法和系统”。描述了用于操作电动或混合动力车辆的电驱动系统的系统和方法。在一个示例中,驱动系统被操作以在选定的车辆工况期间提供额外损耗,使得可以生成更大量的再生制动而不必将更大量的电能存储在电能存储装置中。
技术研发人员:塞思·洛维尔,小洼俊介,布兰登·戴蒙德,乔纳森·海尔
受保护的技术使用者:福特全球技术公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!