在自适应巡航中控制车辆的控制装置、方法和计算机可读介质与流程
本发明涉及对车辆的控制,更具体地,涉及对处于自适应巡航中的车辆的操作模式的控制。
背景技术:
1、相比于定速巡航的自动驾驶技术,自适应巡航(acc)可以根据路况、交通状况等信息自动控制车辆的动力从而控制车辆的速度,其进一步提升了用户的自动驾驶体验。在自适应巡航中,可以通过诸如雷达、摄像头的监测设备监测路况和交通状况,以便确定车辆的目标加速度。如果监测到前方有其他车辆或其他障碍物,则设定新的目标加速度以使车辆减速。如果监测到前方没有障碍物,同时如果车辆还未达到用户预设的目标速度,则设定新的目标加速度使车辆加速。通过车辆的实测纵向加速度,可以得到目标加速度与实测加速度之间的差值。根据该差值控制诸如发动机、电机、制动系统的动力部件,以控制车辆的动力,这被称作偏差控制。例如,如果目标加速度大于实测加速度,则需要通过增加发动机或电机的转速以增加车辆动力;如果目标加速度小于实测加速度,则需要通过降低发动机或电机的转速或者通过制动系统增加制动力来减小车辆动力。
2、通常,在路面平坦、道路笔直的行驶工况下,实测加速度平滑变化,其与目标加速度的差值也平滑变化,此时偏差控制对于车辆动力的控制是平稳的。但是在一些异常工况下,实测加速度会出现忽大忽小的波动,实测加速度可能在某个测量时刻小于目标加速度,而在下一测量时刻又突然大于目标加速度,这导致在偏差控制中车辆先加速又突然制动,给驾驶用户带来顿挫感,从而降低了驾驶舒适度。
3、因此,仍然期望提供改进的对处于自适应巡航中的车辆的控制。
技术实现思路
1、本发明提供了改进的对处于自适应巡航中的车辆的控制,其在偏差控制中考虑了异常工况的存在,并且在确定异常工况开始时能够终止当前偏差控制模式,例如,退出当前偏差控制模式或调整当前偏差控制,以避免在当前偏差控制中因实测加速度的波动而导致的车辆的突然加速和制动,从而提升用户的驾驶舒适度。
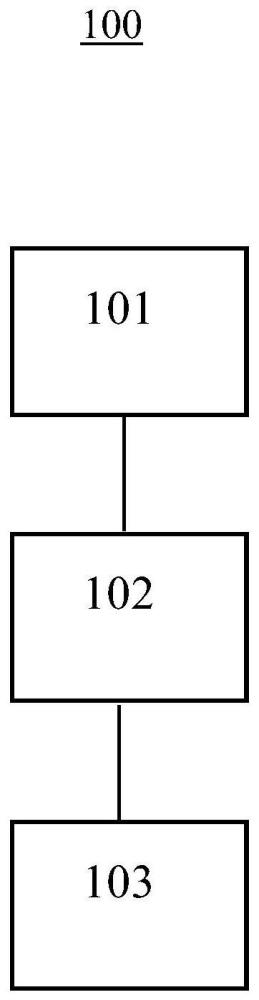
2、根据本发明的一个方面,提出了一种在自适应巡航的第一操作模式中控制车辆的控制装置,在所述第一操作模式中,基于目标加速度与测量的纵向加速度之间的差值来控制所述车辆的动力,所述装置包括:接收单元,其用于接收所述车辆的行驶状态信息;确定单元,其用于基于所述行驶状态信息确定所述第一操作模式的终止条件;以及操作模式切换单元,其用于响应于所述终止条件而将所述第一操作模式切换到不同于所述第一操作模式的第二操作模式。
3、根据本发明的另一方面,提出了一种在自适应巡航的第一操作模式中控制车辆的控制方法,在所述第一操作模式中,基于目标加速度与测量的纵向加速度之间的差值来控制所述车辆的动力,所述方法包括:接收所述车辆的行驶状态信息;基于所述行驶状态信息确定所述第一操作模式的终止条件;以及响应于所述终止条件而将所述第一操作模式切换到不同于所述第一操作模式的第二操作模式。
4、根据本发明的又一方面,提出了一种存储有指令的计算机可读介质,所述指令当由处理器运行时令所述处理器执行根据本发明的任意实施例的方法。
5、在车辆处于自适应巡航的偏差控制模式中时,如果车辆的行驶工况正常(例如路面平坦且道路笔直),车辆的加速或减速也能够被平稳控制。然而,当车辆进入异常工况,异常工况会导致利用当前的车载传感器以及加速度测量方法测量的加速度产生波动。由于没有区别地考虑异常工况和正常工况,在正常工况下表现良好的偏差控制会由于异常工况下的加速度波动而导致车辆的突然加速和制动,从而给驾驶用户带来顿挫感,这降低了用户的驾驶舒适度。因此,在检测到终止条件(该终止条件例如指示异常工况)时,本发明提出通过退出或修改当前的偏差控制,以避免车辆的突然加速和制动,从而提升用户的驾驶舒适度。
6、本领域技术人员在阅读和理解以下详细描述之后将认识到本发明的其他优点。
技术特征:
1.一种在自适应巡航的第一操作模式中控制车辆的控制装置,在所述第一操作模式中,基于目标加速度与测量的纵向加速度之间的差值来控制所述车辆的动力,所述装置包括:
2.根据权利要求1所述的装置,
3.根据权利要求2所述的装置,
4.根据权利要求1所述的装置,还包括计算单元,
5.根据权利要求1所述的装置,
6.根据权利要求5所述的装置,
7.根据权利要求1所述的装置,
8.根据权利要求1所述的装置,
9.根据权利要求1-8中的任一项所述的装置,其中,在所述第二操作模式中,固定所述车辆的动力。
10.根据权利要求1-4中的任一项所述的装置,还包括:
11.一种在自适应巡航的第一操作模式中控制车辆的控制方法,在所述第一操作模式中,基于目标加速度与测量的纵向加速度之间的差值来控制所述车辆的动力,所述方法包括:
12.根据权利要求11所述的方法,
13.根据权利要求11-12中的任一项所述的方法,其中,在所述第二操作模式中,固定所述车辆的动力。
14.根据权利要求11-12中的任一项所述的方法,还包括:
15.一种存储有指令的计算机可读介质,所述指令当由处理器运行时令所述处理器执行根据权利要求11-14中的任一项所述的方法。
技术总结
提出了一种在自适应巡航的第一操作模式中控制车辆的控制装置,在所述第一操作模式中,基于目标加速度与测量的纵向加速度之间的差值来控制所述车辆的动力,所述装置包括:接收单元,其用于接收所述车辆的行驶状态信息;确定单元,其用于基于所述行驶状态信息确定所述第一操作模式的终止条件;以及操作模式切换单元,其用于响应于所述终止条件而将所述第一操作模式切换到不同于所述第一操作模式的第二操作模式。响应于指示车辆进入异常工况的终止条件,将第一操作模式切换到第二操作模式,能够避免在第一操作模式中对车辆的动力的不当控制,以提高用户在驾驶过程中的舒适度。
技术研发人员:盛申,景陶敬
受保护的技术使用者:罗伯特·博世有限公司
技术研发日:
技术公布日:2024/12/5
- 还没有人留言评论。精彩留言会获得点赞!