一种无人驾驶纯电动宽体车用驱动悬置支架的制作方法
本发明涉及无人驾驶相关,尤其涉及一种无人驾驶纯电动宽体车用驱动悬置支架。
背景技术:
1、目前,矿用汽车正向大型化、智能化和无人化发展;目前常见的无人驾驶纯电动宽体车的新能源驱动悬置系统有些直接将驱动总成固定在车架横梁上,该布置方式在驱动总成落装时较为困难;有些采用四点悬置时在驱动总成附近无横梁的布置,由于车架上驱动总成附近无横梁固定,导致车架结构强度较低;现有的悬置支架与悬置软垫连接大多采用螺栓连接,安装操作不够简单,导致安装困难。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有无人驾驶纯电动宽体车用驱动总成不便于固定安装在车架上的问题,提出了本发明。
3、为解决上述技术问题,本发明提供如下技术方案:一种无人驾驶纯电动宽体车用驱动悬置支架,包括,
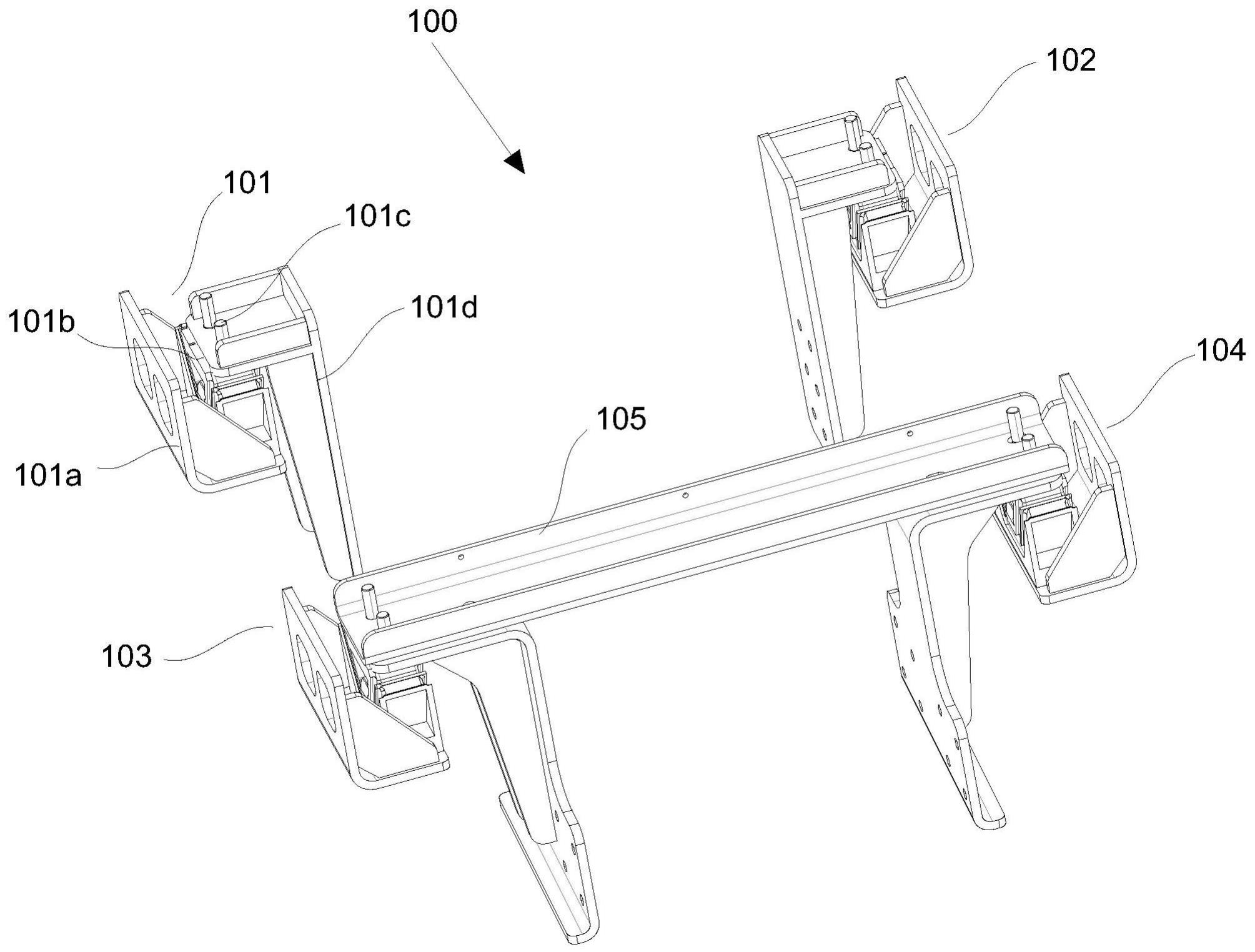
4、支架总成,包括左上前支架组件、对称设置在所述左上前支架组件一侧的右上前支架组件、设置在所述左上前支架组件一侧的左上后支架组件,以及对称设置在所述左上后支架组件一侧的右上后支架组件;
5、其中,所述左上前支架组件、右上前支架组件、左上后支架组件和右上后支架组件结构相同,且两两对称设置。
6、作为本发明所述无人驾驶纯电动宽体车用驱动悬置支架的一种优选方案,其中:所述左上前支架组件包括悬置下支架、设置在所述悬置下支架上的软垫、设置在所述软垫上的双头螺柱,以及设置在所述软垫上并与所述双头螺柱套接的安装架。
7、作为本发明所述无人驾驶纯电动宽体车用驱动悬置支架的一种优选方案,其中:所述左上后支架组件与所述右上后支架组件之间连接有横梁。
8、作为本发明所述无人驾驶纯电动宽体车用驱动悬置支架的一种优选方案,其中:所述悬置下支架上设有用于固定所述软垫的锁紧单元;
9、所述锁紧单元包括设置在所述悬置下支架上的定位柱、设置在所述定位柱上的下压定位组件,以及设置在所述定位柱内部的内径锁紧组件。
10、作为本发明所述无人驾驶纯电动宽体车用驱动悬置支架的一种优选方案,其中:所述下压定位组件包括设置在所述定位柱上的滑动套、设置在所述滑动套顶端的下压结构、设置在所述滑动套内部两侧的第一楔形块和第二楔形块、设置在所述定位柱内部的固定筒、设置在所述固定筒上的异形滑块、设置在所述固定筒内部并所述固定筒滑动连接的升降轴,以及设置在所述定位柱上的翻转结构;
11、其中,所述异形滑块贯穿所述固定筒和所述升降轴,所述异形滑块的两端分别与第一楔形块和第二楔形块匹配。
12、作为本发明所述无人驾驶纯电动宽体车用驱动悬置支架的一种优选方案,其中:所述下压结构包括设置在所述定位柱顶端两侧的固定架、设置在所述固定架之间的转轴、设置在所述转轴上的凸轮,以及设置在所述转轴上并位于所述凸轮两侧的手柄。
13、作为本发明所述无人驾驶纯电动宽体车用驱动悬置支架的一种优选方案,其中:所述翻转结构包括设置在所述定位柱侧壁上的若干个第一通槽、设置在所述第一通槽内部的两个抵压杆、设置在两个所述抵压杆之间的齿轮、设置在所述齿轮一侧的齿条,以及设置在所述齿条一侧并与齿条固定连接的连接杆;
14、其中,两个所述抵压杆之间连接有轴杆,所述齿轮固定在所述轴杆上,所述连接杆一端与所述升降轴连接。
15、作为本发明所述无人驾驶纯电动宽体车用驱动悬置支架的一种优选方案,其中:所述内径锁紧组件包括设置在所述定位柱内部的滑动件、设置在所述滑动件上端并与所述滑动套连接的推杆、开设在所述滑动套侧壁上的若干个第二通槽,以及设置在所述第二通槽内部的橡胶垫;
16、其中,所述橡胶垫与所述滑动件下表面之间连接有铰接杆。
17、作为本发明所述无人驾驶纯电动宽体车用驱动悬置支架的一种优选方案,其中:所述锁紧单元还包括限位组件,所述限位组件包括设置在所述滑动件底端的转动轴、设置在所述转动轴底端的限位套、设置在所述定位柱内部的限位齿槽,以及设置在所述转动轴上并与所述限位齿槽匹配的定位齿。
18、作为本发明所述无人驾驶纯电动宽体车用驱动悬置支架的一种优选方案,其中:所述限位套与所述定位柱转动连接,所述限位套底端延伸至所述悬置下支架下方,所述转动轴与所述限位套滑动卡接。
19、本发明的有益效果:通过将支架总成由四组支架组件组成,使得整体强度高,可靠性强,零件统一度高,可提升车架结构强度,所有安装支架均为钣金结构件,无需开模,且安装更加简单快捷;通过在悬置下支架上设置锁紧单元,可以便于对软垫进行快速安装锁定,且不需要采用辅助工具,操作简单,避免采用螺栓连接带来的操作不便的现象。
技术特征:
1.一种无人驾驶纯电动宽体车用驱动悬置支架,其特征在于:包括,
2.根据权利要求1所述的无人驾驶纯电动宽体车用驱动悬置支架,其特征在于:所述左上前支架组件(101)包括悬置下支架(101a)、设置在所述悬置下支架(101a)上的软垫(101b)、设置在所述软垫(101b)上的双头螺柱(101c),以及设置在所述软垫(101b)上并与所述双头螺柱(101c)套接的安装架(101d)。
3.根据权利要求2所述的无人驾驶纯电动宽体车用驱动悬置支架,其特征在于:所述左上后支架组件(103)与所述右上后支架组件(104)之间连接有横梁(105)。
4.根据权利要求2或3所述的无人驾驶纯电动宽体车用驱动悬置支架,其特征在于:所述悬置下支架(101a)上设有用于固定所述软垫(101b)的锁紧单元(200);
5.根据权利要求4所述的无人驾驶纯电动宽体车用驱动悬置支架,其特征在于:所述下压定位组件(202)包括设置在所述定位柱(201)上的滑动套(202a)、设置在所述滑动套(202a)顶端的下压结构(202b)、设置在所述滑动套(202a)内部两侧的第一楔形块(202c)和第二楔形块(202d)、设置在所述定位柱(201)内部的固定筒(202e)、设置在所述固定筒(202e)上的异形滑块(202f)、设置在所述固定筒(202e)内部并所述固定筒(202e)滑动连接的升降轴(202g),以及设置在所述定位柱(201)上的翻转结构(202h);
6.根据权利要求5所述的无人驾驶纯电动宽体车用驱动悬置支架,其特征在于:所述下压结构(202b)包括设置在所述定位柱(201)顶端两侧的固定架(202b-1)、设置在所述固定架(202b-1)之间的转轴(202b-2)、设置在所述转轴(202b-2)上的凸轮(202b-4),以及设置在所述转轴(202b-2)上并位于所述凸轮(202b-4)两侧的手柄(202b-3)。
7.根据权利要求6所述的无人驾驶纯电动宽体车用驱动悬置支架,其特征在于:所述翻转结构(202h)包括设置在所述定位柱(201)侧壁上的若干个第一通槽(202h-1)、设置在所述第一通槽(202h-1)内部的两个抵压杆(202h-2)、设置在两个所述抵压杆(202h-2)之间的齿轮(202h-3)、设置在所述齿轮(202h-3)一侧的齿条(202h-4),以及设置在所述齿条(202h-4)一侧并与齿条(202h-4)固定连接的连接杆(202h-5);
8.根据权利要求5或7所述的无人驾驶纯电动宽体车用驱动悬置支架,其特征在于:所述内径锁紧组件(203)包括设置在所述定位柱(201)内部的滑动件(203a)、设置在所述滑动件(203a)上端并与所述滑动套(202a)连接的推杆(203b)、开设在所述滑动套(202a)侧壁上的若干个第二通槽(203d),以及设置在所述第二通槽(203d)内部的橡胶垫(203e);
9.根据权利要求8所述的无人驾驶纯电动宽体车用驱动悬置支架,其特征在于:所述锁紧单元(200)还包括限位组件(204),所述限位组件(204)包括设置在所述滑动件(203a)底端的转动轴(204a)、设置在所述转动轴(204a)底端的限位套(204b)、设置在所述定位柱(201)内部的限位齿槽(204c),以及设置在所述转动轴(204a)上并与所述限位齿槽(204c)匹配的定位齿(204d)。
10.根据权利要求9所述的无人驾驶纯电动宽体车用驱动悬置支架,其特征在于:所述限位套(204b)与所述定位柱(201)转动连接,所述限位套(204b)底端延伸至所述悬置下支架(101a)下方,所述转动轴(204a)与所述限位套(204b)滑动卡接。
技术总结
本发明公开了一种无人驾驶纯电动宽体车用驱动悬置支架,包括,支架总成,包括左上前支架组件、对称设置在所述左上前支架组件一侧的右上前支架组件、设置在所述左上前支架组件一侧的左上后支架组件,以及对称设置在所述左上后支架组件一侧的右上后支架组件;其中,所述左上前支架组件、右上前支架组件、左上后支架组件和右上后支架组件结构相同,且两两对称设置。本发明通过将支架总成由四组支架组件组成,使得整体强度高,可靠性强,零件统一度高,可提升车架结构强度,所有安装支架均为钣金结构件,无需开模,且安装更加简单快捷;通过在悬置下支架上设置锁紧单元,可以便于对软垫进行快速安装锁定。
技术研发人员:李树学,郑安,李继,张波,张集,赵耀忠,王英凯,常宏虎
受保护的技术使用者:华能伊敏煤电有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!