本发明涉及驾驶辅助,具体为一种基于车载毫米波雷达的驾驶辅助控制方法。
背景技术:
1、驾驶辅助是当前汽车领域热门话题,包括碰撞预警、自动泊车、紧急刹车、自适应巡航控制等,能够有效降低驾驶难度、减少驾驶员负担以及事故的发生,是下一代智能车辆的标配。
2、驾驶辅助系统主要通过传感器(雷达或摄像头)获取当前车辆周围障碍物信息,结合车辆行驶状态,由控制系统决策出是否预警或加速、制动、转向等动作,以提示或辅助驾驶员控制车辆。
3、驾驶车辆往往受到前方一个或多个车辆的限制,目前控制系统主要以传感器获取的离自车最近障碍物的状态为输入,缺乏对车辆周围全局环境的考虑,尤其在高级别驾驶辅助系统中,如果缺少对被遮挡车辆状态的考虑,控制器决策出的超车、制动、转向、跟随等动作并不全面,除了影响良好的驾驶体验,甚至有发生交通事故的危险。
技术实现思路
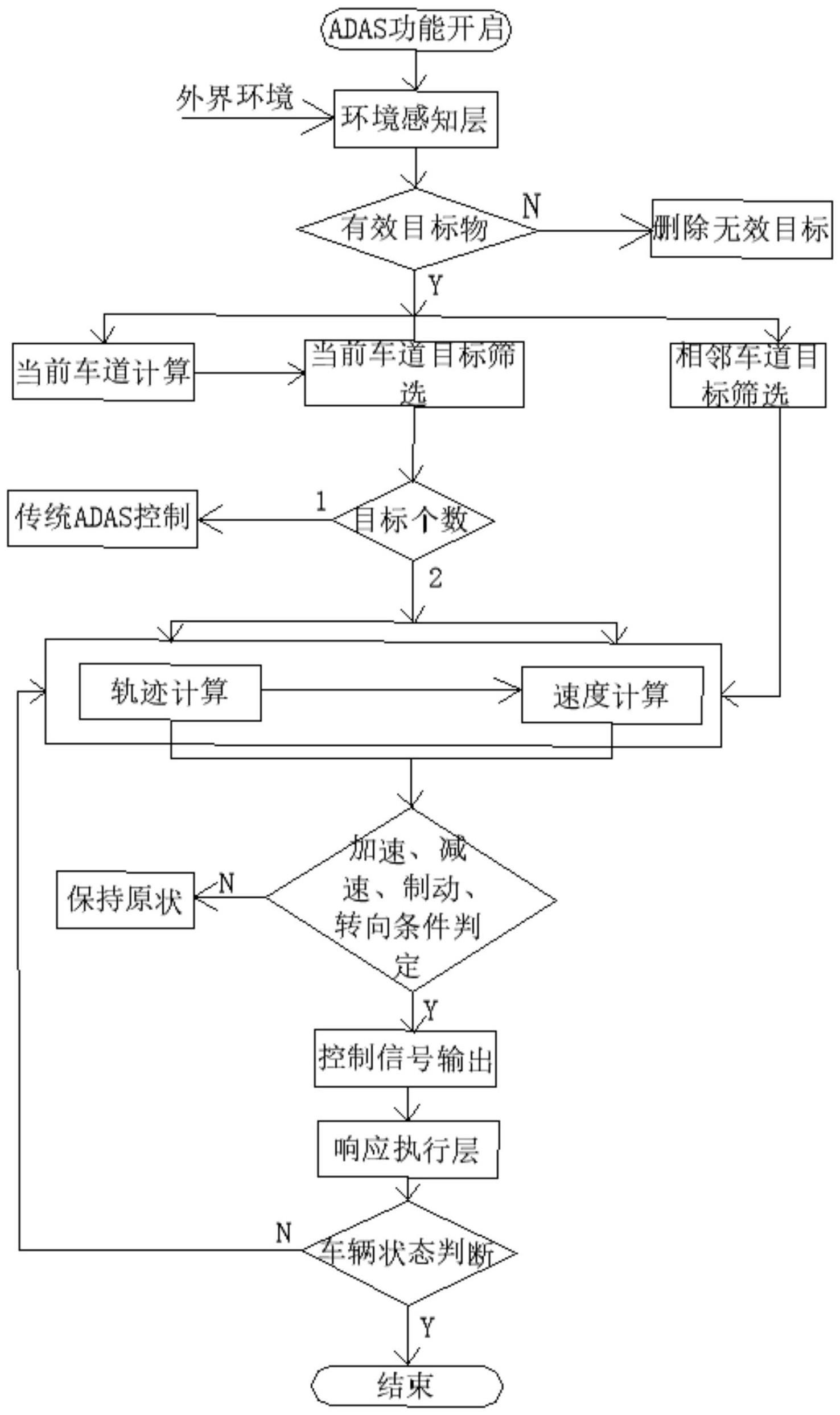
1、一种基于车载毫米波雷达的驾驶辅助控制方法,包括:依次连接的环境感知层、信号处理层、控制决策层、响应执行层;
2、所述环境感知层用于感知自车周围车辆的行驶状态,包括车辆距离自车的距离、车速;其特征在于:所述信号处理层将接收环境感知层的传输信号进行内部处理,包括计算当前车道、相邻车道并对所述车道内的车辆进行筛选,输出当前情境下有效的目标物信息,所述有效的目标信息包括一定距离范围内当前车道中主目标距离自车的距离及车速、一定范围内的辅助目标距离自车的距离及车速、相邻车道中一定范围内的目标车辆,所述主目标是当前车道内位于自车前方且与自车纵向距离最小的车辆,所述辅助目标是位于主目标前方且与主目标纵向距离最小的车辆;所述控制决策层根据信号处理层输出的目标信息计算输出自车需求行驶轨迹信息及行驶速度信息,并根据驾驶员设定的跟车速度、距离等参数做对比判断是否符合信息输出条件,符合的情况下输出控制信号;所述响应执行层接收控制决策层的控制信号后由线控刹车、线控油门、线控转向执行以即时调整自车的加速、制动、转向,执行结果实时反馈到环境感知层、信号处理层、控制决策层以便实现自车与各层之间实时通信。
3、优选的,所述基于车载毫米波雷达的驾驶辅助控制方法,所述环境感知层包括安装在自车前保杠两端的左前毫米波雷达、右前毫米波雷达,包括安装在自车后保杠两端的左后毫米波雷达、右后毫米波雷达,包括安装在自车前向中部的前向毫米波雷达,所述左前毫米波雷达、右前毫米波雷达、左后毫米波雷达、右后毫米波雷达、前向毫米波雷达中均包括当前车道、相邻车道内前方车距探测模块、前方车速探测模块;
4、所述信号处理层包括依次单向连接的信号接收模块、信号融合模块、信号输出模块,所述信号接收模块与环境感知层中各毫米波雷达中的车距探测模块、车速探测模块通信连接,所述信号融合模块从多个前方车辆探测数据中依据纵向距离数据筛选出当前车道与相邻车道中的主目标、辅助目标,并将主目标、辅助目标的有效信息通过信号输出模块传送到控制决策层;
5、所述控制决策层包括依次单向连接的信息接收模块、数据计算模块、数据判断模块、数据输出控制模块,其中所述信号处理层中的信号输出模块与控制决策层中的信息接收模块通信连接,所述数据计算模块依据有效信息统计计算出自车需求的轨迹和速度,所述数据判断模块中设置有最小跟车距离、最大跟车速度的标准参数,数据计算模块计算出的轨迹参数大于最小跟车距离且速度小于最大跟车速度情况下通过数据输出控制模块输出控制信号;
6、所述自车的车辆信息与环境感知层、信号处理层、控制决策层、响应执行层之间通过can或can-fd通信连接,实现自车车辆信息的实时共享。
7、优选的,所述基于车载毫米波雷达的驾驶辅助控制方法,所述数据计算模块包括单向连接的轨迹计算单元、速度计算单元、加速制动转向计算单元;所述轨迹计算单元根据当前车道中主目标/和辅助目标的有效信息计算出跟车轨迹、根据相邻车道中主目标/和辅助目标的距离计算出超车轨迹,所述速度计算单元根据当前车道中主目标/和辅助目标的速度计算出跟车速度、根据相邻车道中主目标/和辅助目标的速度计算出超车速度,所述加速制动转向计算单元根据速度计算单元中输出的速度矢量值计算出横向加速度、纵向加速度。
8、优选的,所述基于车载毫米波雷达的驾驶辅助控制方法,辅助目标存在的情况下计算自车速度时,主目标与辅助目标的参照权重为6:4~8:2,优选7:3。
9、优选的,所述基于车载毫米波雷达的驾驶辅助控制方法,所述一定距离范围内的主目标是距离自车纵向距离最小且距离小于60m的车辆,所述一定距离范围内的辅助目标是指主目标存在时与自车纵向距离小于100m的车辆,若位于此范围之外则认为无主目标或/和无辅助目标。
10、优选的,所述基于车载毫米波雷达的驾驶辅助控制方法,所述环境感知层中的左前毫米波雷达、右前毫米波雷达、左后毫米波雷达、右后毫米波雷达、前向毫米波雷达均采用中长距工作模式且所述中长距工作模式的工作频率为76ghz~77ghz,所述左前毫米波雷达、右前毫米波雷达、左后毫米波雷达、右后毫米波雷达、前向毫米波雷达均通过雷达总线与所述信号处理层连接。
技术特征:1.一种基于车载毫米波雷达的驾驶辅助控制方法,包括:依次连接的环境感知层、信号处理层、控制决策层、响应执行层;
2.如权利要求1所述基于车载毫米波雷达的驾驶辅助控制方法,其特征在于:所述环境感知层包括安装在自车前保杠两端的左前毫米波雷达、右前毫米波雷达,包括安装在自车后保杠两端的左后毫米波雷达、右后毫米波雷达,包括安装在自车前向中部的前向毫米波雷达,所述左前毫米波雷达、右前毫米波雷达、左后毫米波雷达、右后毫米波雷达、前向毫米波雷达中均包括当前车道、相邻车道内前方车距探测模块、前方车速探测模块;
3.如权利要求2所述基于车载毫米波雷达的驾驶辅助控制方法,其特征在于:所述数据计算模块包括单向连接的轨迹计算单元、速度计算单元、加速制动转向计算单元;所述轨迹计算单元根据当前车道中主目标/和辅助目标的有效信息计算出跟车轨迹、根据相邻车道中主目标/和辅助目标的距离计算出超车轨迹,所述速度计算单元根据当前车道中主目标/和辅助目标的速度计算出跟车速度、根据相邻车道中主目标/和辅助目标的速度计算出超车速度,所述加速制动转向计算单元根据速度计算单元中输出的速度矢量值计算出横向加速度、纵向加速度。
4.如权利要求3所述基于车载毫米波雷达的驾驶辅助控制方法,其特征在于:辅助目标存在的情况下计算自车速度时,主目标与辅助目标的参照权重为6:4~8:2,优选7:3。
5.如权利要求1所述基于车载毫米波雷达的驾驶辅助控制方法,其特征在于:所述一定距离范围内的主目标是距离自车纵向距离最小且距离小于60m的车辆,所述一定距离范围内的辅助目标是指主目标存在时与自车纵向距离小于100m的车辆,若位于此范围之外则认为无主目标或/和无辅助目标。
6.如权利要求2所述基于车载毫米波雷达的驾驶辅助控制方法,其特征在于:所述环境感知层中的左前毫米波雷达、右前毫米波雷达、左后毫米波雷达、右后毫米波雷达、前向毫米波雷达均采用中长距工作模式且所述中长距工作模式的工作频率为76ghz~77ghz,所述左前毫米波雷达、右前毫米波雷达、左后毫米波雷达、右后毫米波雷达、前向毫米波雷达均通过雷达总线与所述信号处理层连接。
技术总结本发明提供一种基于车载毫米波雷达的驾驶辅助控制方法,包括环境感知层、信号处理层、控制决策层、响应执行层;所述环境感知层是77G车载毫米波雷达,用来感知外界环境信息;信号处理层对信息进行识别与选择,输出当前场景下有效信息;控制决策层根据目标物信息、车辆的状态等输出需求的加速、制动、转向信号;所述响应执行层对控制决策层的信号进行动作,并将执行结果反馈给控制决策层。上述技术方案不仅能够获取离本车最近的主目标信息,还能感知被主目标遮挡的辅助目标信息,信号处理层将最近车辆和被遮挡车辆的信息进行融合后,再进行决策,此种控制方法能够提高驾驶辅助系统对外界环境的综合响应能力,提前做出准确决策,提高行车安全。
技术研发人员:叶涛,高学敏
受保护的技术使用者:苏州豪米波技术有限公司
技术研发日:技术公布日:2024/1/15