基于自动驾驶的路径生成方法、装置及电子设备与流程
本申请实施例涉及自动驾驶,尤其涉及一种基于自动驾驶的路径生成方法、装置及电子设备。
背景技术:
1、传统驾校教学过程中,通常为了对学员进行教学,需要教练亲自驾驶教练车进行演示,但毕竟教练的精力有限,难以短时间内多次重复驾驶教练车演练,导致学员在学习时只能获得很少次数的演练教学。
2、为了提高教学效率,可以通过加装自动驾驶系统以改造现有的教练车,实现驾校考试项目的自动驾驶演练。在驾校考试项目自动驾驶演示过程中,现有的教练车自动驾驶每次都需要从每个项目起点开始进行完整的自动驾驶演示。
3、但是,学员有时候可能在启动自动驾驶演示时车辆并不是处于合适的位置,如果车辆还按照既定的演示路线行驶,因为位置偏差过大,车辆很可能就不能按照演示的路线行驶,造成演示失败和其他危险。因此,若车辆不在原点时,还需要人工驾驶到起始位置,又或者通过自动驾驶回到起始位置。而现有的车辆因场地狭窄的原因,若要做到自动驾驶回到原点,需要对不同路径进行多次尝试,这会耗费大量的时间,造成演示效率低下的问题。
技术实现思路
1、为了解决上述问题,本申请实施例提供一种基于自动驾驶的路径生成方法、装置及电子设备,能够提高路径生成的准确性,从而提高车辆的演示效率。
2、第一方面,本申请提供了一种基于自动驾驶的路径生成方法,应用于电子设备,所述方法包括:
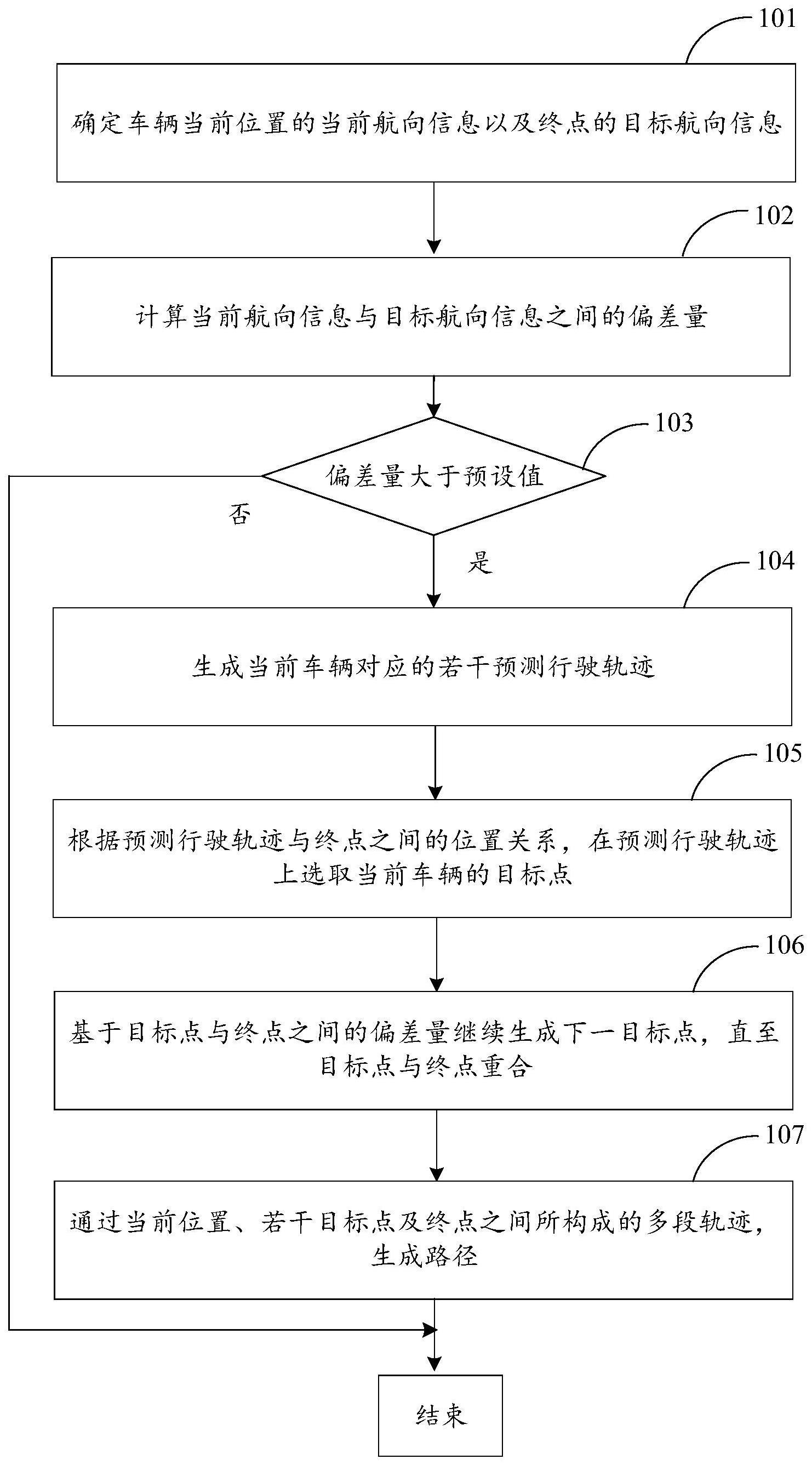
3、确定车辆当前位置的当前航向信息以及终点的目标航向信息,所述当前航向信息以及目标航向信息包括定位坐标参数以及车辆朝向对应的航向参数;
4、计算所述当前航向信息与目标航向信息之间的偏差量;
5、若所述偏差量大于预设值,则生成当前车辆对应的若干预测行驶轨迹;
6、根据所述预测行驶轨迹与所述终点之间的位置关系,在所述预测行驶轨迹上选取当前车辆的目标点;
7、基于所述目标点与终点之间的偏差量继续生成下一目标点,直至所述目标点与终点重合;
8、通过所述当前位置、若干目标点及终点之间所构成的多段轨迹,生成路径。
9、在一实施例中,所述预测行驶轨迹包括车辆前进方向的预测行驶轨迹,以及车辆后退方向的预测行驶轨迹。
10、在一实施例中,所述生成当前车辆的若干预测行驶轨迹,包括:
11、获取车辆模型,所述车辆模型包括车辆轴距和最大转向角度;
12、根据所述车辆模型获得车辆在前进方向及后退方向上的最小转弯半径;
13、根据所述车辆的最小转弯半径,获得基于不同转向角度下的前进方向与后退方向上的若干预测行驶轨迹。
14、在一实施例中,所述计算所述当前航向信息与目标航向信息之间的偏差量,包括:
15、若当前航向信息的航向参数为目标航向信息的航向参数为
16、计算获得当前航向信息与目标航向信息之间的航向差;
17、判断航向差是否小于180度;
18、若小于180度,则航向夹角否则为
19、所述若所述偏差量大于预设值,则生成当前车辆对应的若干预测行驶轨迹,包括:
20、判断所述航向夹角是否大于车辆的最大转向角度;
21、若是,则根据航向夹角以及生成当前车辆对应的若干预测行驶轨迹。
22、在一实施例中,所述根据所述预测行驶轨迹与所述终点之间的位置关系,在所述预测行驶轨迹上选取当前车辆的目标点,包括:
23、确定各个所述预测行驶轨迹与所述终点之间的相对距离;
24、检索选取相对距离最小的所述预测行驶轨迹上的点作为当前车辆的目标点。
25、在一实施例中,所述通过所述当前位置、若干目标点及终点之间所构成的多段轨迹,生成路径,包括:
26、获取预设的不同车辆状态下的加速度值,以及当前位置到目标点、目标点到目标点、目标点到终点的各段行驶时间;
27、根据所述加速度值及行驶时间,基于五次多项式分别计算当前位置到目标点、目标点到目标点、目标点到终点的多段轨迹;
28、将多段轨迹进行拼接,获得当前位置到终点的总的路径。
29、第二方面,本申请还公开了一种基于自动驾驶的路径生成装置,包括:
30、信息确定模块,用于确定车辆当前位置的当前航向信息以及终点的目标航向信息,所述当前航向信息以及目标航向信息包括定位坐标参数以及车辆朝向对应的航向参数;
31、计算模块,用于计算所述当前航向信息与目标航向信息之间的偏差量;
32、预测行驶轨迹生成模块,用于若所述偏差量大于预设值,则生成当前车辆对应的若干预测行驶轨迹;
33、目标点选取模块,用于根据所述预测行驶轨迹与所述终点之间的位置关系,在所述预测行驶轨迹上选取当前车辆的目标点;基于所述目标点与终点之间的偏差量继续生成下一目标点,直至所述目标点与终点重合;
34、路径生成模块,用于通过所述当前位置、若干目标点及终点之间所构成的多段轨迹,生成路径。
35、在一实施例中,所述预测行驶轨迹包括车辆前进方向的预测行驶轨迹,以及车辆后退方向的预测行驶轨迹;
36、所述预测行驶轨迹生成模块,具体用于:
37、获取车辆模型,所述车辆模型包括车辆轴距和最大转向角度;
38、根据所述车辆模型获得车辆在前进方向及后退方向上的最小转弯半径;
39、根据所述车辆的最小转弯半径,获得基于不同转向角度下的前进方向与后退方向上的若干预测行驶轨迹。
40、在一实施例中,所述预测行驶轨迹生成模块,具体用于:
41、确定各个所述预测行驶轨迹与所述终点之间的相对距离;
42、检索选取相对距离最小的所述预测行驶轨迹上的点作为当前车辆的目标点。
43、第三方面,本申请还提供了一种电子设备,所述电子设备包括处理器、存储器,所述处理器与存储器之间电性连接;
44、所述存储器中存储有计算机程序,所述处理器通过调用所述存储器中存储的所述计算机程序,以执行如上任意一项所述的基于自动驾驶的路径生成方法。
45、该基于自动驾驶的路径生成方法、装置及电子设备,通过判断当前航向信息与目标航向信息之间的偏差量,若偏差量大于预设值则生成若干预测行驶轨迹,通过生成若干预测行驶轨迹,并根据不同预测行驶轨迹与终点之间的位置关系,来生成若干用于平滑轨迹的目标点,进而通过目标点之间的多段轨迹生成返回原点的最优路径,减少车辆回归原点的行车时间,从而提高考试科目的演示效率。
技术特征:
1.一种基于自动驾驶的路径生成方法,应用于电子设备,其特征在于,所述方法包括:
2.如权利要求1所述的基于自动驾驶的路径生成方法,其特征在于,所述预测行驶轨迹包括车辆前进方向的预测行驶轨迹,以及车辆后退方向的预测行驶轨迹。
3.如权利要求2所述的基于自动驾驶的路径生成方法,其特征在于,所述生成当前车辆的若干预测行驶轨迹,包括:
4.如权利要求3所述的基于自动驾驶的路径生成方法,其特征在于:
5.如权利要求3所述的基于自动驾驶的路径生成方法,其特征在于,所述根据所述预测行驶轨迹与所述终点之间的位置关系,在所述预测行驶轨迹上选取当前车辆的目标点,包括:
6.如权利要求1所述的基于自动驾驶的路径生成方法,其特征在于,所述通过所述当前位置、若干目标点及终点之间所构成的多段轨迹,生成路径,包括:
7.一种基于自动驾驶的路径生成装置,其特征在于,包括:
8.如权利要求7所述的基于自动驾驶的路径生成装置,其特征在于,所述预测行驶轨迹包括车辆前进方向的预测行驶轨迹,以及车辆后退方向的预测行驶轨迹;
9.如权利要求7所述的基于自动驾驶的路径生成装置,其特征在于,所述预测行驶轨迹生成模块,具体用于:
10.一种电子设备,其特征在于,所述电子设备包括处理器、存储器,所述处理器与存储器之间电性连接;
技术总结
本发明实施例涉及自动驾驶技术领域,公开了一种基于自动驾驶的路径生成方法,所述方法包括:确定车辆当前位置的当前航向信息以及终点的目标航向信息;计算当前航向信息与目标航向信息之间的偏差量;若偏差量大于预设值,则生成当前车辆对应的若干预测行驶轨迹;根据预测行驶轨迹与终点之间的位置关系,在预测行驶轨迹上选取当前车辆的目标点;基于目标点与终点之间的偏差量继续生成下一目标点,直至目标点与终点重合;通过当前位置、若干目标点及终点之间所构成的多段轨迹,生成路径。本申请通过目标点之间的多段轨迹生成返回原点的最优路径,减少车辆回归原点的行车时间,从而提高考试科目的演示效率。
技术研发人员:罗洋资
受保护的技术使用者:广州市德赛西威智慧交通技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!