用于测试自主车辆意图的原型车道的制作方法
背景技术:
1、随着出现的自主车辆技术的提高,特别是与人类操作员的人工控制相比,人们担忧它们的能力。在人类操作员控制车辆的情况下,操作员可以在行驶中进行调整以便成功地在驾驶过程中出现的大量场景中的任何一个场景中导航。
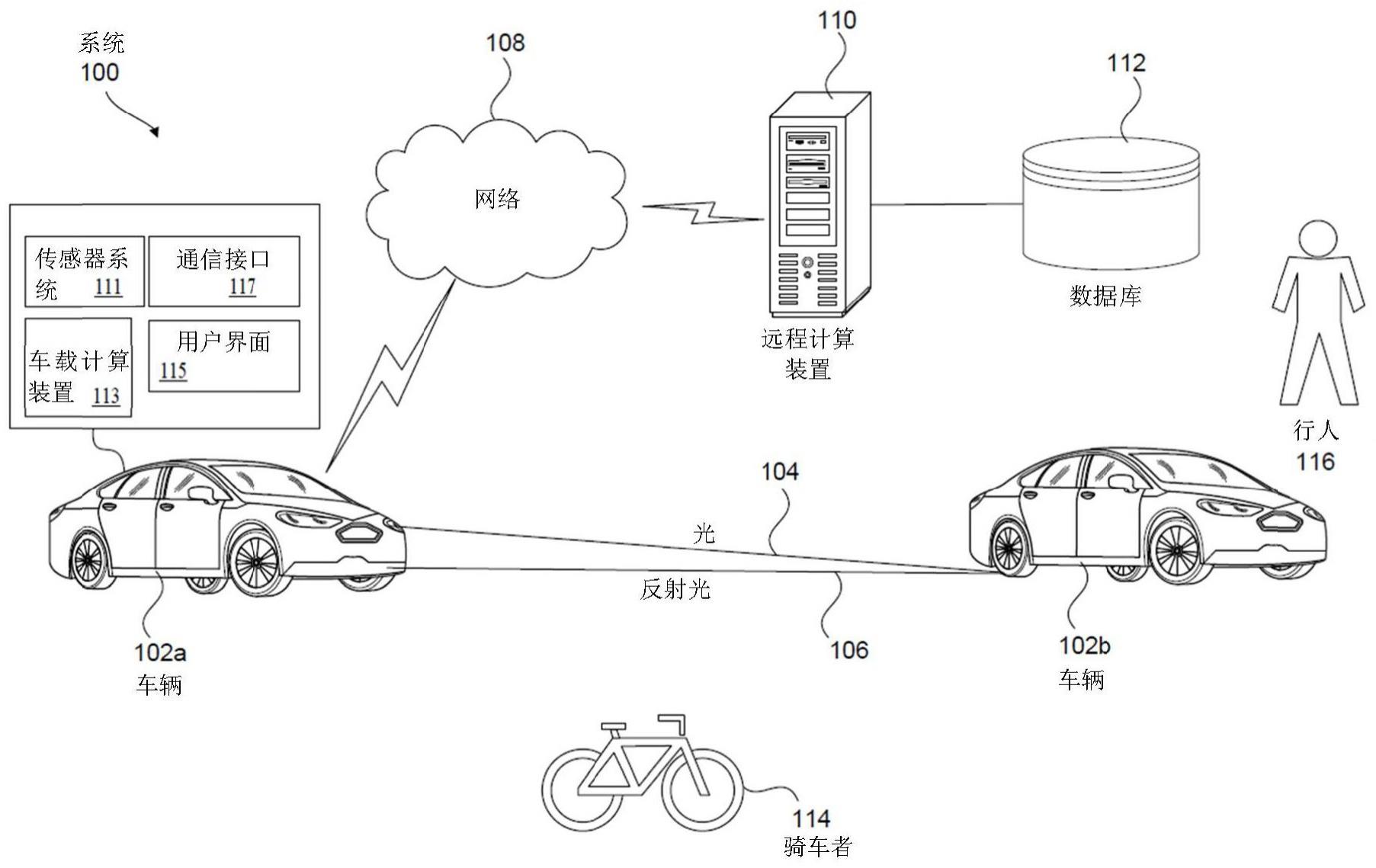
2、自主车辆使用各种传感器(比如光学、雷达和激光雷达传感器)获取关于它们的环境的信息以便构建对它们周围的世界的理解。连同提前提供给车辆系统的其他信息一起使用这个信息,车辆可以做出同样允许在可能出现的大量场景中的任何一个场景中成功导航的决定。
3、这样的自主车辆系统的可靠运行的潜力已经通过广泛的现实世界的使用进行证明。当自主车辆的运行条件改变时,确保这些自主车辆系统的可信度成为采用的关键。即使在更复杂的情况和环境下没有操作员的任何干预的情况下,公众、消费者、政府和其他利益相关者对确保自主车辆将几乎在所有可能的情况下可靠地运行感兴趣。
4、因此,需要提供自主车辆的可靠运行的证据的技术。
技术实现思路
1、根据各个方面,在此公开用于选择地理网内的车行道的第一车道段的系统、方法和计算机程序产品,其中地理网包括多个车道段。确定第一车道段对应于原型车道集中的一个原型车道(protolane),其中原型车道与多个车道段中的一个或多个附加车道段相关联。基于第一车道段对应于原型车道的确定,将原型车道与第一车道段相关联。
技术特征:
1.一种方法,所述方法包括:
2.根据权利要求1所述的方法,所述方法进一步地包括:
3.根据权利要求1所述的方法,所述方法进一步地包括:
4.根据权利要求3所述的方法,其中所述特征集包括排他的车道段特征。
5.根据权利要求1所述的方法,所述方法进一步地包括:
6.根据权利要求1所述的方法,所述方法进一步地包括:
7.根据权利要求1所述的方法,所述方法进一步地包括:
8.一种系统,所述系统包括:
9.根据权利要求8所述的系统,所述操作进一步地包括:
10.根据权利要求8所述的系统,所述操作进一步地包括:
11.根据权利要求10所述的系统,其中所述特征集包括排他的车道段特征。
12.根据权利要求8所述的系统,所述操作进一步地包括:
13.根据权利要求8所述的系统,所述操作进一步地包括:
14.根据权利要求8所述的系统,所述操作进一步地包括:
15.一种存储有指令的非暂时性计算机可读介质,所述指令在由至少一个计算装置执行时使所述至少一个计算装置执行包括以下的操作:
16.根据权利要求15所述的非暂时性计算机可读介质,所述操作进一步地包括:
17.根据权利要求15所述的非暂时性计算机可读介质,所述操作进一步地包括:
18.根据权利要求17所述的非暂时性计算机可读介质,其中所述特征集包括排他的车道段特征。
19.根据权利要求15所述的非暂时性计算机可读介质,所述操作进一步地包括:
20.根据权利要求15所述的非暂时性计算机可读介质,所述操作进一步地包括:
技术总结
在此公开用于使用原型车道测试自主车辆意图的系统、方法和计算机程序产品。例如,方法包括选择地理网内的车行道的第一车道段,其中地理网包括多个车道段。确定第一车道段对应于原型车道集中的一个原型车道,其中原型车道与多个车道段中的一个或多个附加车道段相关联。基于第一车道段对应于原型车道的确定来将原型车道与第一车道段相关联。
技术研发人员:乔治·彼得·肯尼斯·卡尔,安德鲁·哈特内特,尼古拉·波波夫,布雷特·布朗,彼得·W·兰德,迈克尔·帕西利奥
受保护的技术使用者:福特全球技术公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!