无人驾驶车辆控制方法、装置、计算机设备和存储介质与流程
本技术涉及自动驾驶控制,尤其涉及一种无人驾驶车辆控制方法、装置、计算机设备和存储介质。
背景技术:
1、在正常的交通场景中,执行紧急任务的警车、消防车、救护车和工程救险车等特种车辆具有优先通行的权利。而有时还需要车辆在路旁停靠配合相关特种车辆的问询以及调查。随着人工智能等技术的发展,高等级自动驾驶的方案也在逐渐落地。纯无人驾驶的车辆需要准确感知是否出现特种车辆,从而做出相应的避让动作。而传统的无人驾驶车辆对特种车辆的判断准确度较低,导致面对存在特种车辆的交通场景时常常难以做出正确的决策。
技术实现思路
1、本技术的目的旨在至少能解决上述的技术缺陷之一,特别是现有技术中对特种车辆的判断准确度较低的问题。
2、第一方面,本技术提供了一种无人驾驶车辆控制方法,包括:
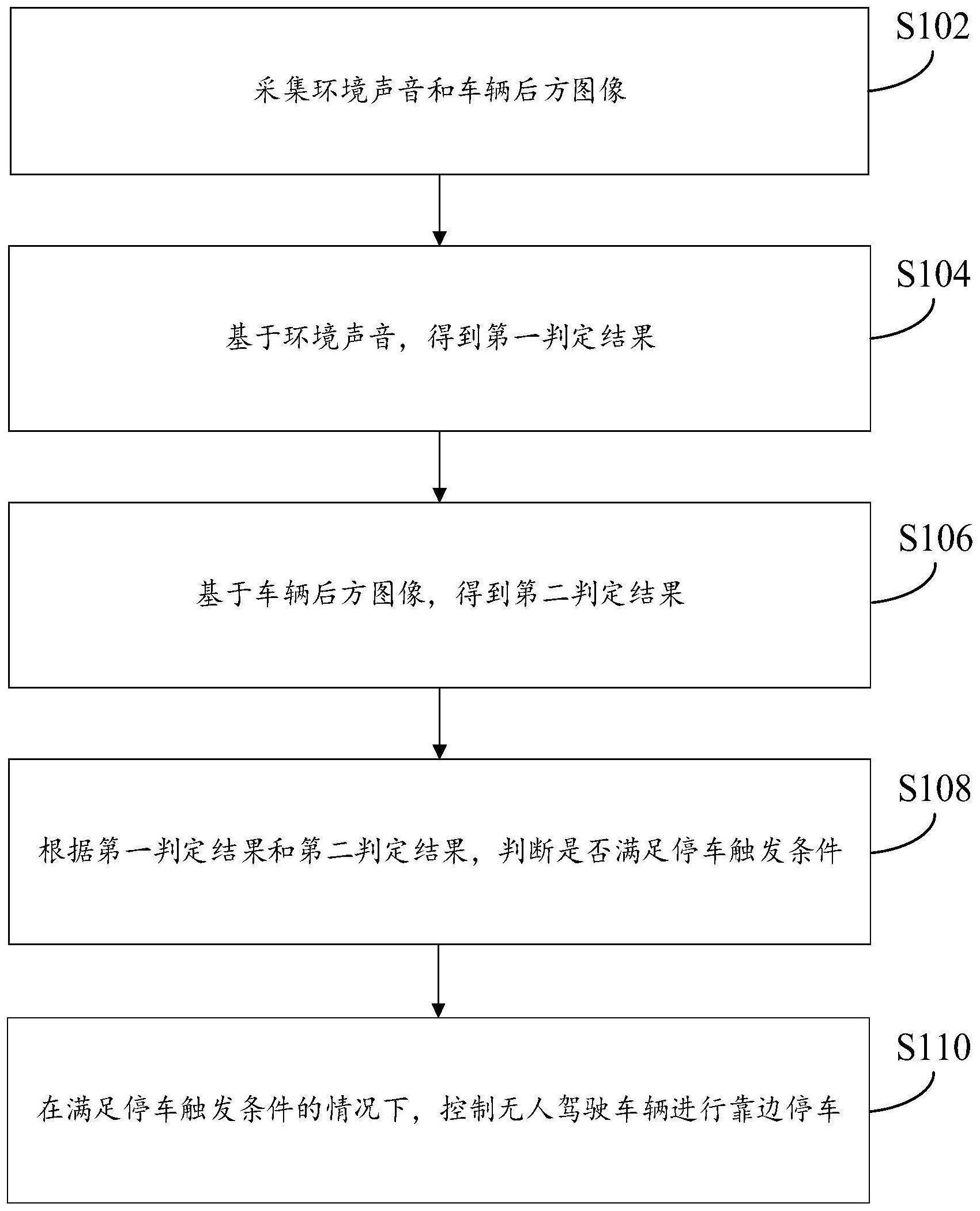
3、采集环境声音和车辆后方图像;
4、基于环境声音,得到第一判定结果;
5、基于车辆后方图像,得到第二判定结果;
6、根据第一判定结果和第二判定结果,判断是否满足停车触发条件;停车触发条件包括第一判定结果反映检测到警笛声、第二判定结果反映检测到特种车辆跟随,且第一判定结果和第二判定结果的置信度均大于对应的置信度阈值;
7、在满足停车触发条件的情况下,控制无人驾驶车辆进行靠边停车。
8、在其中一个实施例中,该无人驾驶车辆控制方法,还包括:
9、在第一判定结果反映检测到警笛声,或第二判定结果反映检测到特种车辆跟随的情况下,向远程控制端发送环境车况信息和对应的求助信息;
10、若接收到远程控制端的靠边停车指令,则控制无人驾驶车辆进行靠边停车。
11、在其中一个实施例中,车辆后方图像为多帧,基于车辆后方图像,得到第二判定结果,包括:
12、基于任意一帧车辆后方图像,利用第二判别模型识别本车后方是否存在闪烁警灯的特种车辆;
13、在第二判别模型的识别结果反映本车后方存在闪烁警灯的特种车辆的情况下,将该帧车辆后方图像确定为目标图像,并获取目标图像的识别置信度;
14、在目标图像连续出现的数量超过预设数量阈值时,则第二判定结果为检测到特种车辆跟随;否则,第二判定结果为未检测到特种车辆跟随;
15、根据超过预设数量阈值时连续的各目标图像的识别置信度,得到第二判定结果的置信度。
16、在其中一个实施例中,在目标图像连续出现的数量超过预设数量阈值时,则第二判定结果为检测到特种车辆跟随;否则,第二判定结果为未检测到特种车辆跟随,包括:
17、在目标图像连续出现的数量超过预设数量阈值时,判断目标图像中的特种车辆与本车的距离是否缩短;若是,则第二判定结果为检测到特种车辆跟随;否则,第二判定结果为未检测到特种车辆跟随。
18、在其中一个实施例中,无人驾驶车辆后方安装有颜色传感器,颜色传感器用于检测环境光中是否存在与预设颜色匹配的颜色,预设颜色为特种车辆的警灯颜色;
19、在第二判别模型的识别结果反映本车后方存在闪烁警灯的特种车辆的情况下,将该帧车辆后方图像确定为目标图像,并获取目标图像的识别置信度,包括:
20、在第二判别模型的识别结果反映本车后方存在闪烁警灯的特种车辆的情况下,若颜色传感器的输出反映环境光中存在与预设颜色匹配的颜色,则将该帧车辆后方图像确定为目标图像,并获取目标图像的识别置信度。
21、在其中一个实施例中,控制无人驾驶车辆进行靠边停车,包括:
22、指示规划模块规划靠边停车路径;
23、根据规划结果,控制无人驾驶车辆进行靠边停车。
24、在其中一个实施例中,根据规划结果,控制无人驾驶车辆进行靠边停车,包括:
25、在靠边停车路径存在且停车地点满足停靠要求的情况下,控制无人驾驶车辆按照靠边停车路径进行靠边停车;
26、否则,控制无人驾驶车辆按照正常运行路径继续行驶,并返回指示规划模块规划靠边停车路径的步骤继续执行。
27、在其中一个实施例中,停靠要求包括:停车地点与影响通行区域的距离大于距离阈值。
28、在其中一个实施例中,在控制无人驾驶车辆按照靠边停车路径进行靠边停车的过程中,还包括:
29、采集车辆前方图像;
30、判断车辆前方图像中是否存在事故警示标志;
31、若是,则中断靠边停车,并控制无人驾驶车辆进行绕行。
32、在其中一个实施例中,控制无人驾驶车辆进行绕行,包括:
33、对事故警示标志所在车道以及相邻车道标记为异常车道;
34、控制无人驾驶车辆选择异常车道以外的车道进行绕行。
35、在其中一个实施例中,在无人驾驶车辆完成靠边停车后,还包括:
36、若接收到远程控制端的查验辅助指令,则控制无人驾驶车辆解锁车门和打开车窗;
37、若接收到远程控制端的继续行驶指令,则控制无人驾驶车辆返回正常行驶路径继续行驶。
38、在其中一个实施例中,在无人驾驶车辆完成靠边停车后,还包括:
39、以特种车辆为目标,进行行为追踪;
40、在特种车辆完成通行的情况下,控制无人驾驶车辆返回正常行驶路径继续行驶。
41、在其中一个实施例中,在进行行为追踪后,还包括:
42、根据环境声音和车辆后方图像,判断特种车辆是否为警车;
43、若是,且特种车辆停止于无人驾驶车辆后方,则控制无人驾驶车辆解锁车门和打开车窗。
44、第二方面,本技术实施例还提供了一种无人驾驶车辆控制装置,包括:
45、感知模块,用于采集环境声音和车辆后方图像;
46、第一判断模块,用于基于环境声音,得到第一判定结果;
47、第二判断模块,用于基于车辆后方图像,得到第二判定结果;
48、第三判断模块,用于根据第一判定结果和第二判定结果,判断是否满足停车触发条件;停车触发条件包括第一判定结果反映检测到警笛声、第二判定结果反映检测到特种车辆跟随,且第一判定结果和第二判定结果的置信度均大于对应的置信度阈值;
49、控制模块,用于在满足停车触发条件的情况下,控制无人驾驶车辆进行靠边停车。
50、第三方面,本技术实施例还提供了一种计算机设备,包括一个或多个处理器,以及存储器,存储器中存储有计算机可读指令,计算机可读指令被一个或多个处理器执行时,执行上述任一实施例中的无人驾驶车辆控制方法的步骤。
51、第四方面,本技术实施例还提供了一种存储介质,存储介质中存储有计算机可读指令,计算机可读指令被一个或多个处理器执行时,使得一个或多个处理器执行上述任一实施例中的无人驾驶车辆控制方法的步骤。
52、从以上技术方案可以看出,本技术实施例具有以下优点:
53、基于上述任一实施例,通过感知环境声音和车辆后方图像,分别得到第一判定结果和第二判定结果,当第一判定结果和第二判定结果满足停车触发条件时,由无人驾驶车辆自行靠边停车,无需依赖人工辅助。该方法在无人驾驶车辆的运行过程中可在主驾驶仓无人的前提下实现对特种车辆的自动配合,且判断准确性高,减少无人驾驶车辆误停车逻辑的出现,提高了无人驾驶车辆在复杂交通环境下的适应能力。
- 还没有人留言评论。精彩留言会获得点赞!