车辆车速控制方法、系统及汽车与流程
本发明涉及车辆,尤其涉及一种车辆车速控制方法、系统及汽车。
背景技术:
1、驾驶车辆倒车以及在狭窄环境行驶一直是很多驾驶员难以驾驭的场景,也是日常使用车辆中经常发生碰撞的情况,为此车辆上通常加装一定的检测装置。
2、在倒车出库的场景下,现存的方式是通过车载摄像头和雷达传感器监测车辆后方的障碍物,但该方案中的车载摄像头成本较高,且车载摄像头容易受到在光线干扰和夜间的使用局限性,同时车载摄像头覆盖的视野范围受到摄像头视角的限制,对距离的探测效果也并不理想,进而导致无法准确地对车辆进行制动,容易引起安全问题。此外,针对倒车出库的场景,视野盲区较多,车载摄像头和雷达传感器难以对不同视野盲区进行识别,同样会导致无法准确地对车辆进行制动,容易引起安全问题。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种车辆车速控制方法、系统及汽车,旨在解决现有技术中无法准确地对车辆进行降速的技术问题。
2、为实现上述目的,本发明提出一种车辆车速控制方法,所述车辆车速控制方法包括:
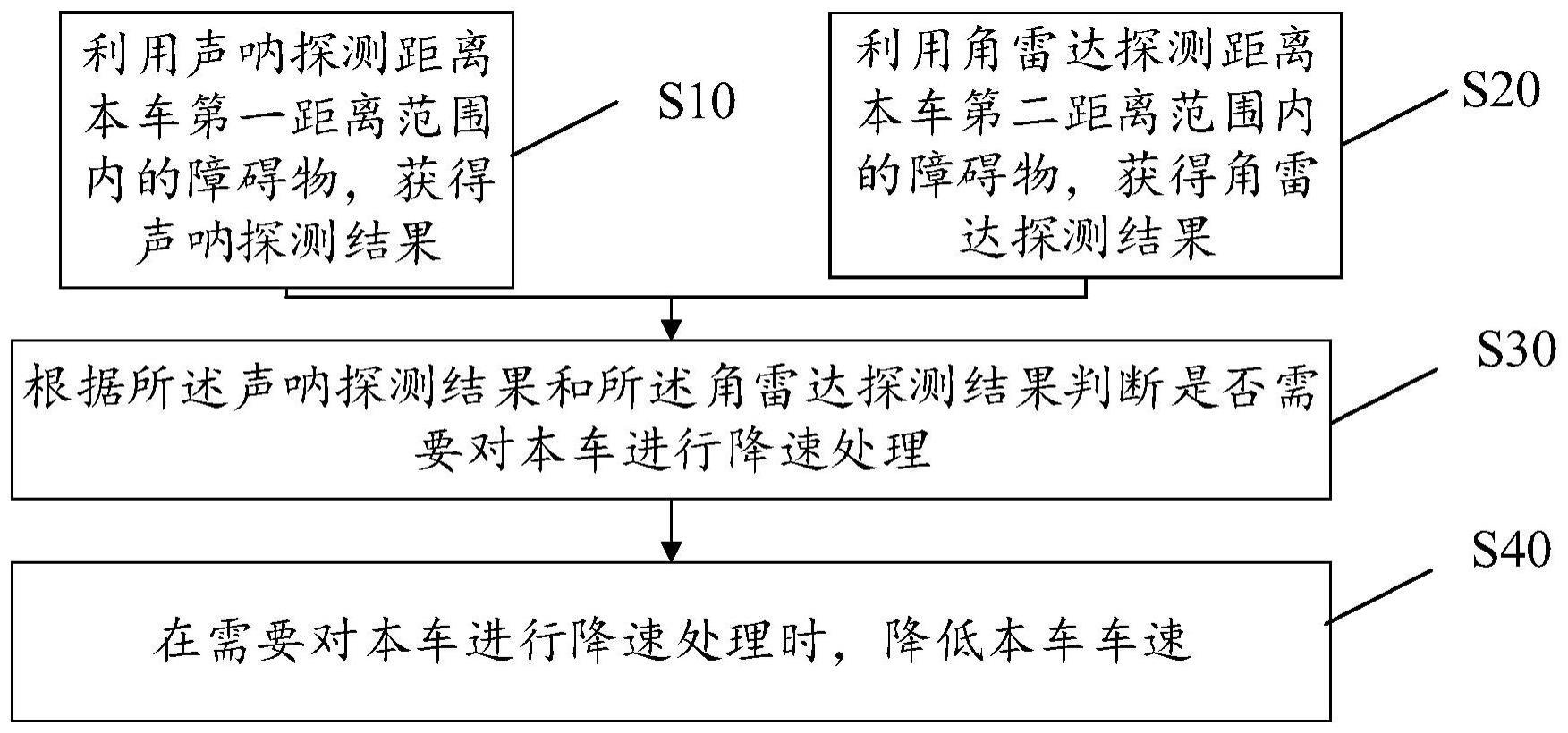
3、利用声呐探测距离本车第一距离范围内的障碍物,获得声呐探测结果;
4、利用角雷达探测距离本车第二距离范围内的障碍物,获得角雷达探测结果;
5、所述第一距离范围的最大端点值小于所述第二距离范围的最大端点值;
6、根据所述声呐探测结果和所述角雷达探测结果判断是否需要对本车进行降速处理;
7、在需要对本车进行降速处理时,降低本车车速。
8、可选地,所述根据所述声呐探测结果和所述角雷达探测结果判断是否需要对本车进行降速处理,包括:
9、当所述声呐探测结果为未探测到障碍物,所述角雷达探测结果为探测到障碍物的情况下,检测本车的当前车速;
10、在所述当前车速大于第一车速时,确定本车与所述障碍物之间的距碰撞时间;
11、根据所述距碰撞时间确定是否需要进行第一降速处理。
12、可选地,所述根据所述距碰撞时间确定是否需要进行第一降速处理,之后还包括:
13、若是,则在第一降速处理过程中,检测驾驶员是否进行主动操作;
14、在驾驶员未进行主动操作且所述声呐探测结果为探测到障碍物时,对本车进行第二降速处理,所述第二降速处理的加速度大于第一降速处理的加速度。
15、可选地,所述根据所述声呐探测结果和所述角雷达探测结果判断是否需要对本车进行降速处理,包括:
16、当所述声呐探测结果与角雷达探测结果均探测到障碍物,或者所述声呐探测结果为探测到障碍物且角雷达探测结果为未探测到障碍物时,检测本车的当前车速;
17、在所述当前车速不为零时,确定本车与所述障碍物之间的距碰撞时间;
18、根据所述距碰撞时间确定是否需要进行第二降速处理。
19、可选地,所述根据所述距碰撞时间确定是否需要进行第二降速处理,包括:
20、根据所述声呐探测结果内的回波幅值与角雷达探测结果内的点云聚类判断障碍物是否为行人;
21、若否,则在所述距碰撞时间小于第一制动时间时,对本车进行第二降速处理。
22、可选地,所述根据所述声呐探测结果内的回波幅值与角雷达探测结果内的点云聚类判断障碍物是否为行人之后,包括:
23、若是,则在所述距碰撞时间小于第二制动时间时,对本车进行第二降速处理,所述第二制动时间大于所述第一制动时间;或则在所述距碰撞时间小于第一制动时间时,对本车进行第三降速处理,所述第三降速处理的加速度大于所述第二降速处理的加速度。
24、可选地,所述根据所述距碰撞时间确定是否需要进行第二降速处理,之后还包括:
25、若是,检测驾驶员是否进行主动操作;
26、在驾驶员并未进行主动操作时,检测当前本车状态和障碍物状态;
27、在所述当前本车状态为本车静止和所述障碍物状态为障碍物消失时,停止控制车辆进行制动。
28、可选地,所述检测驾驶员是否进行主动操作,之后包括:
29、若是,则在所述主动操作为油门踏板的幅度大于第一幅值时,返回所述对本车进行第二降速处理的步骤;
30、或,在驾驶员进行制动或者转向操作时,停止主动对本车进行降速处理。
31、为实现上述目的,本发明还提出一种车辆车速控制系统,所述车辆车速控制系统包括:声呐、角雷达以及控制器;
32、其中,所述声呐和角雷达分别与所述控制器连接;
33、所述声呐,用于探测距离本车第一距离范围内的障碍物,获得声呐探测结果;
34、所述角雷达,用于探测距离本车第二距离范围内的障碍物,获得角雷达探测结果,所述第一距离范围与所述第二距离范围相接且处于所述第二距离范围与本车之间;
35、所述控制器,用于根据所述声呐探测结果和所述角雷达探测结果判断是否需要对本车进行降速处理;
36、所述控制器,还用于在需要对本车进行降速处理时,降低本车车速。
37、为实现上述目的,本发明还提出一种汽车,所述汽车包括:所述的车辆车速控制系统。
38、本发明提供了一种车辆车速控制方法、系统及汽车,该车辆车速控制方法包括:利用声呐探测距离本车第一距离范围内的障碍物,获得声呐探测结果;利用角雷达探测距离本车第二距离范围内的障碍物,获得角雷达探测结果,所述第一距离范围与所述第二距离范围相接且处于所述第二距离范围与本车之间;根据所述声呐探测结果和所述角雷达探测结果判断是否需要对本车进行降速处理;在需要对本车进行降速处理时,降低本车车速。在本实施例一中通过声呐和角雷达分别对不同范围内的障碍物进行识别,然后根据声呐和角雷达的探测结果准确地确定是否需要进行本车降速,从而避免受到光线限制、视野范围限制、距离探测或部分区域探测不准确导致无法准确地对本车进行制动。
技术特征:
1.一种车辆车速控制方法,其特征在于,所述车辆车速控制方法包括:
2.如权利要求1所述的车辆车速控制方法,其特征在于,所述根据所述声呐探测结果和所述角雷达探测结果判断是否需要对本车进行降速处理,包括:
3.如权利要求2所述的车辆车速控制方法,其特征在于,所述根据所述距碰撞时间确定是否需要进行第一降速处理,之后还包括:
4.如权利要求1所述的车辆车速控制方法,其特征在于,所述根据所述声呐探测结果和所述角雷达探测结果判断是否需要对本车进行降速处理,包括:
5.如权利要求4所述的车辆车速控制方法,其特征在于,所述根据所述距碰撞时间确定是否需要进行第二降速处理,包括:
6.如权利要求5所述的车辆车速控制方法,其特征在于,所述根据所述声呐探测结果内的回波幅值与角雷达探测结果内的点云聚类判断障碍物是否为行人之后,包括:
7.如权利要求4所述的车辆车速控制方法,其特征在于,所述根据所述距碰撞时间确定是否需要进行第二降速处理,之后还包括:
8.如权利要求3或7任一项所述的车辆车速控制方法,其特征在于,所述检测驾驶员是否进行主动操作,之后包括:
9.一种车辆车速控制系统,其特征在于,所述车辆车速控制系统包括:声呐、角雷达以及控制器;
10.一种汽车,其特征在于,所述汽车包括:权利要求9所述的车辆车速控制系统。
技术总结
本发明提供了一种车辆车速控制方法、系统及汽车,该车辆车速控制方法包括:利用声呐探测距离本车第一距离范围内的障碍物,获得声呐探测结果;利用角雷达探测距离本车第二距离范围内的障碍物,获得角雷达探测结果;根据所述声呐探测结果和所述角雷达探测结果判断是否需要对本车进行降速处理;在需要对本车进行降速处理时,降低本车车速。在发明通过声呐和角雷达分别对不同范围内的障碍物进行识别,然后根据声呐和角雷达的探测结果准确地确定是否需要进行本车降速,从而避免受到光线限制、视野范围限制、距离探测或部分区域探测不准确导致无法准确地对本车进行制动。
技术研发人员:杨敦逸
受保护的技术使用者:东风汽车有限公司东风日产乘用车公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!