本发明涉及智能汽车领域,具体而言,涉及一种车辆的安全控制方法、电子设备及车辆。
背景技术:
1、电动汽车发生并不是特别严重的故障时,车辆往往还具备一定的行驶能力,也即,具有一定的跛行速度,只不过需要车辆系统对行驶能力进行约束,以防止过高车速对车辆造成不可逆损伤。在现实行车场景中,最高跛行车速如果定的过高,则达不到保障驾驶员生命财产安全的作用,最高跛行车速如果定的过低,则会极大地牺牲车辆的使用性能,降低驾驶体验。因此,车辆最高跛行车速的确定尤为重要,合理的车速限值,一方面可以保护驾驶员的安全,另一方面还可以在不损伤车辆部件的情况之下尽量发挥车辆的使用价值。
2、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种车辆的安全控制方法、电子设备及车辆,以至少解决相关技术中车辆的跛行速度的设置精确度较低的技术问题。
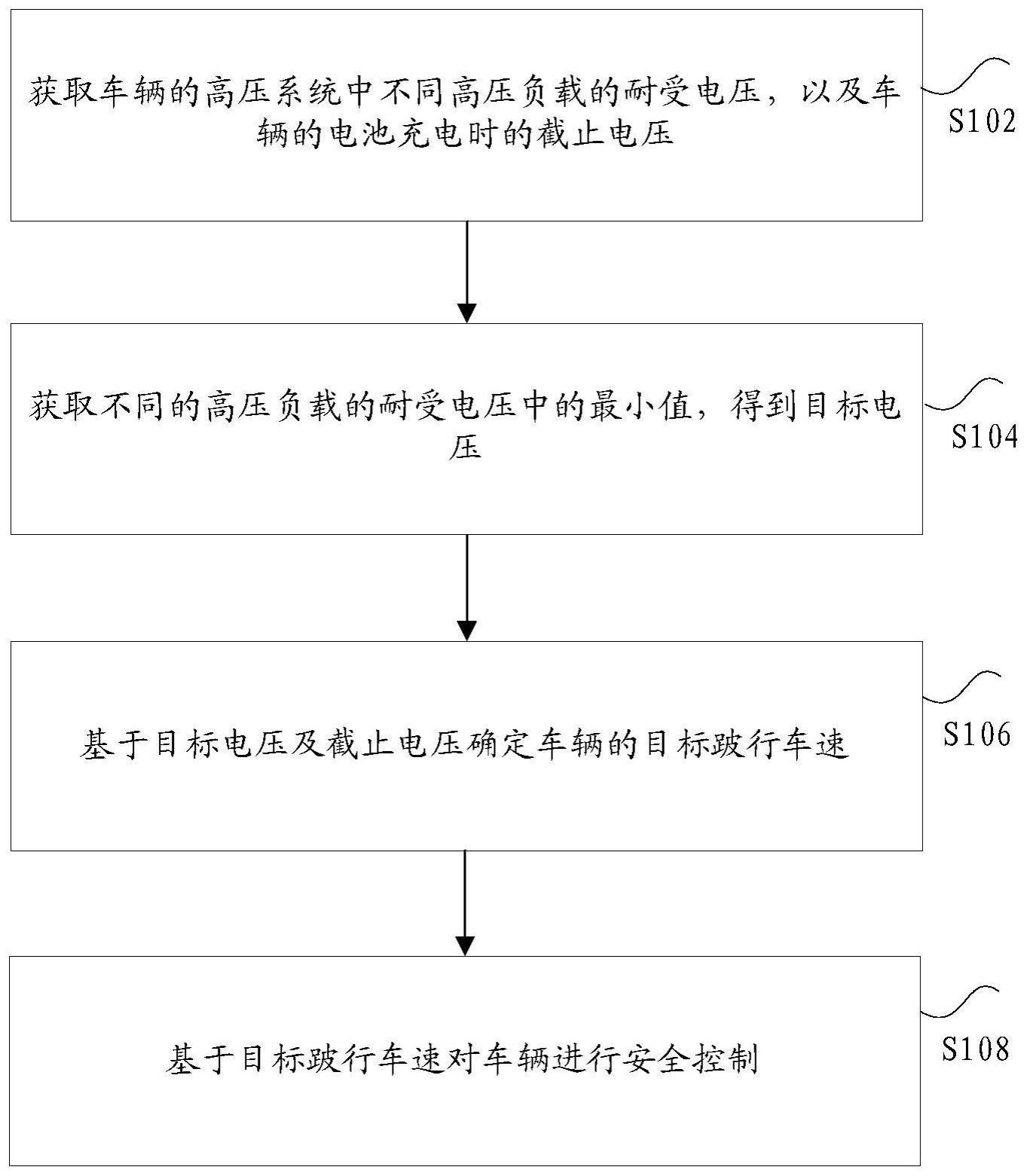
2、根据本发明实施例的一个方面,提供了一种车辆的安全控制方法,包括:获取车辆的高压系统中不同高压负载的耐受电压,以及车辆的电池充电时的截止电压,其中,截止电压用于表征开始给电池充电时,电池两端的电压;获取不同的高压负载的耐受电压中的最小值,得到目标电压;基于目标电压及截止电压确定车辆的目标跛行车速;基于目标跛行车速对车辆进行安全控制。
3、可选的,基于所述目标电压及所述截止电压确定所述车辆的目标跛行车速,包括:基于所述目标电压及所述截止电压,得到目标电动势;基于所述目标电动势所对应的目标转速,得到所述目标跛行车速。
4、可选的,基于所述目标电动势所对应的目标转速,得到所述目标跛行车速,包括:基于所述目标转速和第一目标传动比,确定所述车辆前轮的第一车速,其中,所述第一目标传动比用于表征所述车辆的第一驱动电机到所述车辆前轮的传动比;基于所述目标转速和第二目标传动比,确定所述车辆后轮的第二车速,其中,所述第二目标传动比用于表征所述车辆的第二驱动电机到所述车辆后轮的传动比;基于所述第一车速及所述第二车速确定所述目标跛行车速。
5、可选的,基于所述目标转速和第一目标传动比,确定所述车辆前轮的第一车速,包括:获取所述车辆的前轮胎半径,得到第一轮胎半径;基于所述第一轮胎半径、所述第一目标传动比及所述目标转速比确定所述第一车速。
6、可选的,基于所述第一轮胎半径与所述目标转速比及所述第一目标传动比确定所述第一车速,包括:获取所述目标转速与所述第一轮胎半径及第一系数的第一乘积;获取所述第一目标传动比与第二系数的第二乘积;确定所述第一乘积与所述第二乘积的商值,得到第一车速。
7、可选的,基于所述目标转速和第二目标传动比,确定所述车辆后轮的第二车速,包括:获取所述车辆的后轮胎半径,得到第二轮胎半径;基于所述第二轮胎半径、所述第二目标传动比及所述目标转速确定所述第二车速。
8、可选的,基于所述第二轮胎半径、所述第二目标传动比及所述目标转速确定所述第二车速,包括:获取所述目标转速与所述第二轮胎半径及第一系数的第一目标乘积;获取所述第二目标传动比与第二系数的第二目标乘积;确定所述第二目标乘积与所述第二目标乘积的商值,得到第二车速。
9、可选的,基于所述第一车速及所述第二车速确定所述目标跛行车速,包括:确定所述第一车速与所述第二车速之间的目标差值;响应于所述目标差值大于预设阈值,确定所述第二车速为所述目标跛行车速;响应于所述目标差值小于或等于所述预设阈值,确定所述第一车速为所述目标跛行车速。
10、根据本发明实施例的另一方面,还提供了一种车辆的安全控制装置,包括:第一获取模块,用于获取车辆的高压系统中不同高压负载的耐受电压,以及车辆的电池充电时的截止电压,其中,截止电压用于表征开始给电池充电时,电池两端的电压;第二获取模块,用于获取不同的高压负载的耐受电压中的最小值,得到目标电压;确定模块,用于基于目标电压及截止电压确定车辆的目标跛行车速;控制模块,用于基于目标跛行车速对车辆进行安全控制。
11、根据本发明实施例的另一方面,还提供了一种电子设备,包括一个或多个处理器和存储装置,其中,存储设备用于存储一个或多个程序,当一个或多个程序被一个或多个处理器执行时,使得一个或多个处理器执行上述中任意一项的车辆的安全控制方法。
12、根据本发明实施例的另一方面,还提供了一种车辆,包括存储器和处理器,存储器中存储有计算机程序,处理器被设置为运行计算机程序以执行上述中任一项中的车辆的安全控制方法。
13、在本发明实施例中,获取车辆的高压系统中不同高压负载的耐受电压,以及车辆的电池充电时的截止电压,其中,截止电压用于表征开始给电池充电时,电池两端的电压;获取不同的高压负载的耐受电压中的最小值,得到目标电压;基于目标电压及截止电压确定车辆的目标跛行车速;基于目标跛行车速对车辆进行安全控制。容易注意到的是,可以利用不同的高压负载的耐受电压中的最小值,以及车辆的电池充电时的截止电压来确定目标跛行速度,进而利用目标跛行速度对车辆进行控制,使得确定出来的目标跛行速度既可以满足驾驶体验,又可以保障驾驶员的生命财产安全,从而提高了车辆的跛行速度的设置精确度,进而解决了相关技术中车辆的跛行速度的设置精确度较低的技术问题。
技术特征:1.一种车辆的安全控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,基于所述目标电压及所述截止电压确定所述车辆的目标跛行车速,包括:
3.根据权利要求2所述的方法,其特征在于,基于所述目标电动势所对应的目标转速,得到所述目标跛行车速,包括:
4.根据权利要求3所述的方法,其特征在于,基于所述目标转速和第一目标传动比,确定所述车辆前轮的第一车速,包括:
5.根据权利要求4所述的方法,其特征在于,基于所述第一轮胎半径与所述目标转速比及所述第一目标传动比确定所述第一车速,包括:
6.根据权利要求3所述的方法,其特征在于,基于所述目标转速和第二目标传动比,确定所述车辆后轮的第二车速,包括:
7.根据权利要求6所述的方法,其特征在于,基于所述第二轮胎半径、所述第二目标传动比及所述目标转速确定所述第二车速,包括:
8.根据权利要求3所述的方法,其特征在于,基于所述第一车速及所述第二车速确定所述目标跛行车速,包括:
9.一种电子设备,其特征在于,包括:
10.一种车辆,其特征在于,包括:
技术总结本发明公开了一种车辆的安全控制方法、电子设备及车辆。本发明涉及智能汽车领域,其中,该方法包括:获取车辆的高压系统中不同高压负载的耐受电压,以及车辆的电池充电时的截止电压,其中,截止电压用于表征开始给电池充电时,电池两端的电压;获取不同的高压负载的耐受电压中的最小值,得到目标电压;基于目标电压及截止电压确定车辆的目标跛行车速;基于目标跛行车速对车辆进行安全控制。本发明解决了相关技术中车辆的跛行速度的设置精确度较低的技术问题。
技术研发人员:姜鹏翰,赵开成
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:技术公布日:2024/1/15