新能源汽车行驶控制方法、系统及新能源汽车与流程
本发明涉及新能源汽车行驶,特别是涉及新能源汽车行驶控制方法、系统及新能源汽车。
背景技术:
1、本部分的陈述仅仅是提到了与本发明相关的背景技术,并不必然构成现有技术。
2、随智能驾驶辅助技术发展的陡坡缓降,其应用,能够提升驾驶员在陡坡工况下的驾驶舒适性、行驶安全性,还能通过能量回收,提高能量利用率,降低整车能量消耗率。
3、目前,量产陡坡缓降功能的车速控制是单一通过电机能量回收负扭矩实现的,但这种控制方案存在较大局限性:在电池满电、高温或低温等可能造成允许能量回收功率较小的状态中,将无法保证电机提供足够的满足陡坡缓降功能需求的扭矩,导致陡坡缓降功能效率较低。
技术实现思路
1、为了解决现有技术的不足,本发明提供了新能源汽车行驶控制方法、系统及新能源汽车;本发明以提高陡坡缓降功能可靠性为目标,提出一种改进的陡坡缓降控制策略,主要解决动力电池允许能量回收功率较小状态下的陡坡缓降功能缺少实现方法、效率不高的问题。
2、一方面,提供了新能源汽车行驶控制方法;
3、新能源汽车行驶控制方法,包括:
4、获取陡坡缓降功能开启请求;
5、获取当前汽车行驶数据,根据行驶数据,判断当前行驶数据是否满足陡坡缓降功能开启请求,如果满足,则激活陡坡缓降功能开启请求,同时进入下一步;如果不满足,则退出陡坡缓降功能;
6、获取当前汽车运行状态数据,根据运行状态数据,选择适用于当前运行状态的陡坡缓降方案;如果适用于当前运行状态的陡坡缓降方案是能量回收方案,则整车控制器向电机控制器发出能量回收请求,电机控制器控制电机发出能量回收负扭矩,以控制车速;如果适用于当前运行状态的陡坡缓降方案是主动短路请求方案,则整车控制器向电机控制器发出主动短路请求,电机控制器控制电机发出主动短路制动扭矩,以控制车速。
7、另一方面,提供了新能源汽车行驶控制系统;
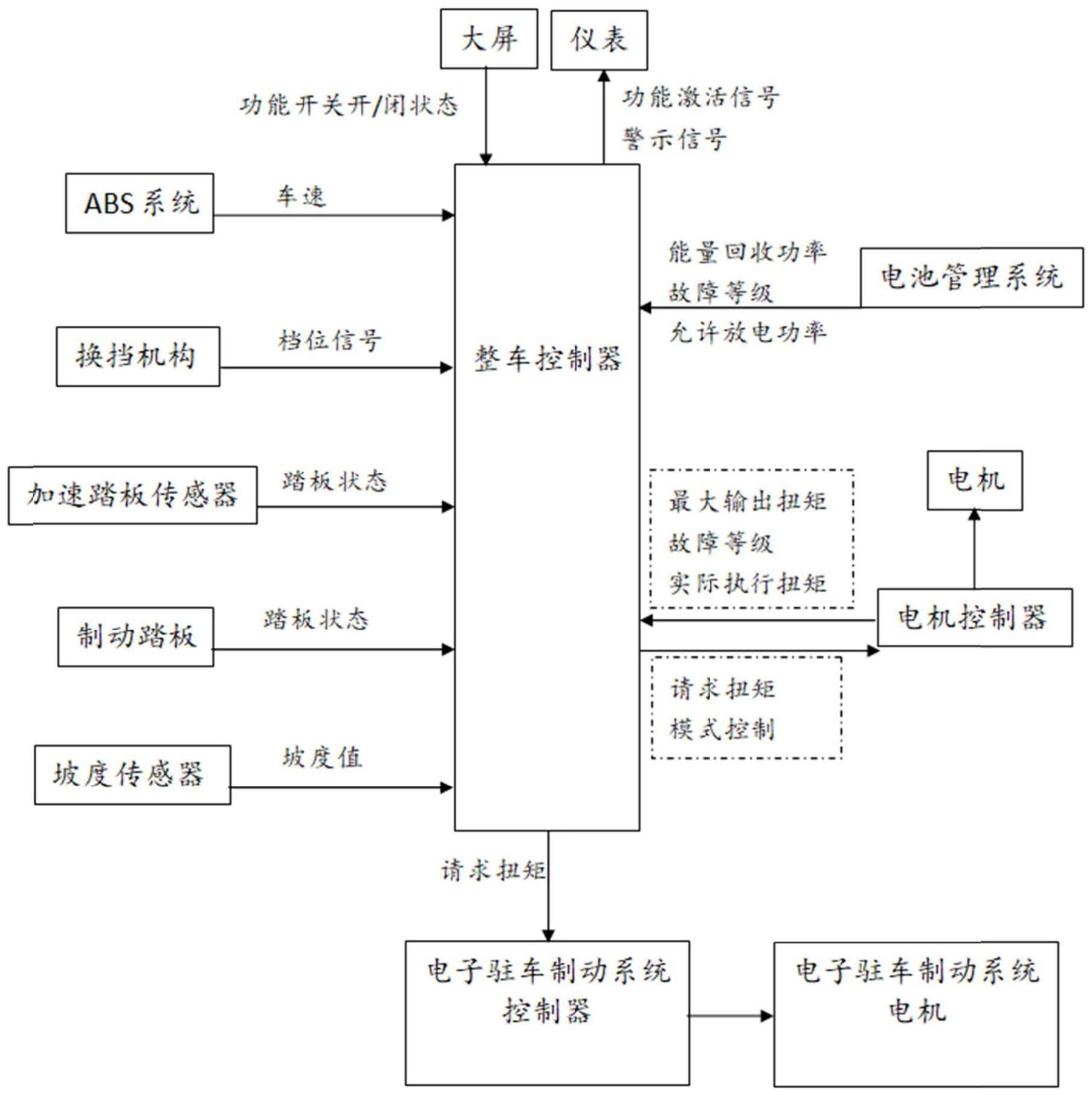
8、新能源汽车行驶控制系统,包括:整车控制器,所述整车控制器分别与电池管理系统、点击控制器、电子驻车制动系统控制器、坡度传感器、制动踏板、加速踏板传感器、换档机构、防抱死系统、大屏幕、仪表连接;所述电机控制器与电机连接,所述电子驻车制动系统控制器与电子驻车制动系统电机连接;
9、所述整车控制器,其被配置为:获取陡坡缓降功能开启请求;
10、获取当前汽车行驶数据,根据行驶数据,判断当前行驶数据是否满足陡坡缓降功能开启请求,如果满足,则激活陡坡缓降功能开启请求,同时进入下一步;如果不满足,则退出陡坡缓降功能;
11、获取当前汽车运行状态数据,根据运行状态数据,选择适用于当前运行状态的陡坡缓降方案;如果适用于当前运行状态的陡坡缓降方案是能量回收方案,则整车控制器向电机控制器发出能量回收请求,电机控制器控制电机发出能量回收负扭矩,以控制车速;如果适用于当前运行状态的陡坡缓降方案是主动短路请求方案,则整车控制器向电机控制器发出主动短路请求,电机控制器控制电机发出主动短路制动扭矩,以控制车速。
12、再一方面,还提供了一种新能源汽车;
13、一种新能源汽车,包括:新能源汽车行驶控制系统。
14、上述技术方案中的一个技术方案具有如下优点或有益效果:
15、在现有的单一基于能量回收的陡坡缓降技术方案的基础上,增加主动短路作为在允许能量回收功率不能满足功能需求时的替代方法,提高了陡坡缓降功能的可靠性。增加电子驻车制动系统输出制动扭矩,补足陡坡缓降能力与需求的差距,进一步提高陡坡缓降功能的可靠性。
技术特征:
1.新能源汽车行驶控制方法,其特征是,包括:
2.如权利要求1所述的新能源汽车行驶控制方法,其特征是,获取当前汽车行驶数据,所述行驶数据,包括:车速、档位、加速踏板的状态、制动踏板的状态、坡度值。
3.如权利要求1所述的新能源汽车行驶控制方法,其特征是,判断当前行驶数据是否满足陡坡缓降功能开启请求,包括:
4.如权利要求1所述的新能源汽车行驶控制方法,其特征是,获取当前汽车运行状态数据,其中运行状态数据,包括:实际车速、目标车速、电池允许能量回收功率、电池允许最大输出功率、电机允许最大输出扭矩。
5.如权利要求1所述的新能源汽车行驶控制方法,其特征是,根据运行状态数据,选择适用于当前运行状态的陡坡缓降方案,具体包括:
6.如权利要求5所述的新能源汽车行驶控制方法,其特征是,所述方法,还包括:选择适用于当前运行状态的陡坡缓降方案之后,如果坡度变化值超过设定阈值,或者车速变化值超过设定阈值,则重新进行陡坡缓降方案的选择。
7.如权利要求6所述的新能源汽车行驶控制方法,其特征是,所述方法,还包括:获取电机实际输出扭矩,判断电机实际输出扭矩是否超过设定阈值,如果超过,则整车控制器向电子驻车制动系统控制器发出制动请求,电子驻车制动系统控制器控制电机输出指定制动扭矩f5;所述电机实际输出扭矩与指定制动扭矩f5之和,大于设定比例的当前需求扭矩f4;
8.如权利要求5所述的新能源汽车行驶控制方法,其特征是,能量回收负扭矩是f1、f3、f4的最小值;主动短路制动扭矩是f2、f3、f4的最小值。
9.新能源汽车行驶控制系统,其特征是,包括:整车控制器,所述整车控制器分别与电池管理系统、点击控制器、电子驻车制动系统控制器、坡度传感器、制动踏板、加速踏板传感器、换档机构、防抱死系统、大屏幕、仪表连接;所述电机控制器与电机连接,所述电子驻车制动系统控制器与电子驻车制动系统电机连接;
10.一种新能源汽车,包括:如权利要求9所述的新能源汽车行驶控制系统。
技术总结
本发明公开了新能源汽车行驶控制方法、系统及新能源汽车,所述方法包括:获取陡坡缓降功能开启请求;获取当前汽车行驶数据,根据行驶数据,判断当前行驶数据是否满足陡坡缓降功能开启请求,如果满足,则激活陡坡缓降功能开启请求;获取当前汽车运行状态数据,根据运行状态数据,选择适用于当前运行状态的陡坡缓降方案;如果适用于当前运行状态的陡坡缓降方案是能量回收方案,则整车控制器向电机控制器发出能量回收请求,电机控制器控制电机发出能量回收负扭矩,以控制车速;如果适用于当前运行状态的陡坡缓降方案是主动短路请求方案,则整车控制器向电机控制器发出主动短路请求,电机控制器控制电机发出主动短路制动扭矩,以控制车速。
技术研发人员:黄意,刘长伟,夏瑞,邓金明,吴苏明
受保护的技术使用者:奇瑞新能源汽车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!