一种用于无人车的车辆防追尾方法和装置与流程
本申请涉及自动驾驶领域,特别涉及一种用于无人车的车辆防追尾方法和装置。
背景技术:
1、随着社会的发展,私家车的数量越来越庞大,机动车与机动车、非机动车之间发生的交通事故也越来越多。对交通事故的类型进行分析可以发现,追尾事故是非常频发的一类交通事故。在日常驾驶中,尤其是无人车所在的城市道路的驾驶环境中,在早晚高峰或者拥堵路段,交通参与者之间一般难以准确判断安全刹车距离,当驾驶员无法准确判断安全刹车距离的情况下,容易出现跟着距离过小的情况,当前车突然刹车时容易发生交通事故,存在着非常大的安全隐患。
2、现有技术中,当前车司机踩刹车的时候,车辆后尾灯亮起,后方交通参与者看见后尾灯亮起,获取到前车制动的信息,通过踩刹车保持与前车之间的距离。但是这种方式要求后方交通参与者与前车之间的距离必须大于安全刹车距离,而这个安全刹车距离很难获取。同时由于是在前方车辆执行刹车动作后车尾灯才亮起,留给后方交通参与者的反应时间很短,非常容易发生追尾事故。
技术实现思路
1、本申请提供了一种用于无人车的车辆防追尾方法和装置,用于解决在车辆驾驶过程中,容易发生追尾事故的技术问题。所述技术方案如下:
2、一方面,提供了一种用于无人车的车辆防追尾的方法,所述方法包括:
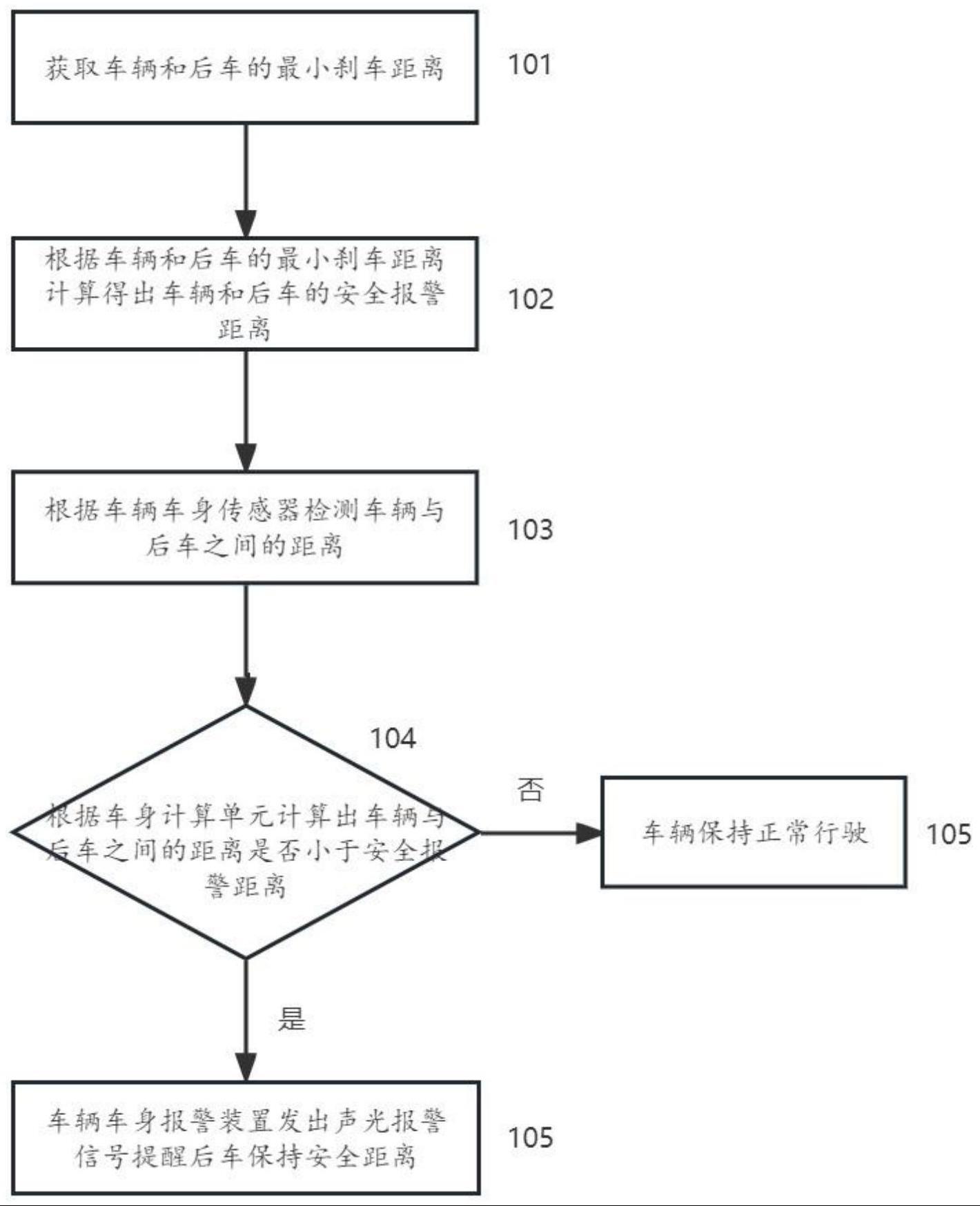
3、获取车辆和后车的最小刹车距离;
4、根据车辆和后车的最小刹车距离计算得出车辆和后车的安全报警距离;
5、检测车辆与后车之间的距离;
6、计算车辆与后车之间的距离是否小于安全报警距离;
7、若车辆与后车之间的距离小于安全报警距离,则车辆发出声光报警信号提醒后车保持安全距离,否则车辆保持正常行驶。
8、在一种可能的实现方式中,获取车辆和后车的最小刹车距离,包括:
9、获取车辆的当前行驶速度和最大刹车减速度,基于车辆当前行驶速度和最大刹车减速度,计算得出车辆的最小刹车距离;
10、获取后车的当前行驶速度和最大刹车减速度,基于后车当前行驶速度和最大刹车减速度,计算得出后车的最小刹车距离。
11、在一种可能的实现方式中,根据车辆和后车的最小刹车距离计算得出车辆和后车的安全报警距离,包括:
12、将后车的最小刹车距离减去车辆的最小刹车距离,得到的差值作为车辆和后车的安全报警距离。
13、在一种可能的实现方式中,获取车辆的最大刹车减速度,包括:
14、基于车辆车型,获取车辆的最大刹车减速度初值;
15、获取后车的最大刹车减速度,包括:
16、车辆通过视觉传感器获取后车图像,进而确定后车车型,根据后车车型调用云端服务器中存储的后车最大刹车减速度初值。
17、在一种可能的实现方式中,在获取车辆的最大刹车减速度初值之后,该方法进一步包括:
18、按固定时间间隔对车辆的最大刹车减速度进行多次采样,获得最大刹车减速度的第一校正偏移量;
19、对车辆和后车在一般天气和特殊天气条件下的最大刹车减速度进行多次采样,获得对最大刹车减速度的第二校正偏移量;其中,特殊天气条件包括雨、雪、雾、风、冰雹中的一种或多种;
20、对车辆和后车在一般时间和特殊时间下的最大刹车减速度进行多次采样,并获得对最大刹车减速度的第三校正偏移量,存储在车辆存储器和云端服务器中;其中,特殊时间包括早高峰、晚高峰、周末、夜间中的一种或多种;
21、对车辆和后车在一般路况和特殊路况条件下的最大刹车减速度进行多次采样,并获得对最大刹车减速度的第四校正偏移量;其中,第四校正偏移量包括上下坡、急弯、过水路面、限速中的一种或多种;
22、基于最大刹车减速度的初值、第一校正偏移量、第二校正偏移量、第三校正偏移量和第四校正偏移量,计算校正后的最大刹车减速度。
23、在一种可能的实现方式中,获取校正后的车辆最大刹车减速度之后,所述方法还包括:基于最大刹车减速度的上限值和下限值,对车辆最大刹车减速度进行限制;具体地:
24、ae0=athh if ae≥athh;
25、ae0=ae if athl<ae<athh;
26、ae0=athl if ae≤athl;
27、其中,ae用于表征车辆最大刹车减速度,ae0用于表征限制后的车辆最大刹车减速度,athh用于表征最大刹车减速度的上限值,athl用于表征最大刹车减速度的下限值。
28、在一种可能的实现方式中,所述方法还包括:
29、对不同驾驶员的驾驶习惯进行学习,并将驾驶员和其对应的驾驶习惯存储在云端服务器中;在驾驶员进行驾驶的过程中,获取该驾驶员的驾驶习惯,以对最大刹车减速度进行校正。
30、另一方面,提供了一种用于无人车的车辆防追尾装置,所述装置包括:
31、信息获取模块,用于获取车辆和后车的最小刹车距离;
32、计算模块,用于根据车辆和后车的最小刹车距离计算得出车辆和后车的安全报警距离;
33、检测模块,用于检测车辆与后车之间的距离;
34、所述计算模块还用于计算车辆与后车之间的距离是否小于安全报警距离;
35、报警模块,用于若车辆与后车之间的距离小于安全报警距离,则车辆发出声光报警信号提醒后车保持安全距离,否则车辆保持正常行驶。
36、另一方面,提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现所述用于无人车的车辆防追尾方法。
37、另一方面,提供了一种计算机设备,所述计算机设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述指令由所述处理器加载并执行所述用于无人车的车辆防追尾方法。
38、本申请提供的技术方案的有益效果至少包括:
39、通过车辆的当前行驶速度,获取实时的安全报警距离。并当两车之间的距离小于安全报警距离时由前方车辆提醒后方交通参与者保持安全距离,在提高行驶的安全性的同时,能够有效降低无效报警信息对驾驶员的干扰。
40、实时获取车辆和后车的当前行驶速度、最大刹车减速度,并计算得到安全报警距离,能够得到精确的安全报警距离,进一步提高了行驶安全性。
41、通过考虑车辆自身性能、天气、时间、路况、驾驶员驾驶习惯等因素,对车辆最大行驶减速度进行校正,从而使安全报警距离的计算更加精确,有效降低追尾事故的发生率。
技术特征:
1.一种用于无人车的车辆防追尾方法,其特征在于,所述方法包括:
2.根据权利要求1所述的车辆防追尾方法,其特征在于,获取车辆和后车的最小刹车距离,包括:
3.根据权利要求1所述的车辆防追尾方法,其特征在于,根据车辆和后车的最小刹车距离计算得出车辆和后车的安全报警距离,包括:
4.根据权利要求2所述的车辆防追尾方法,其特征在于,获取车辆的最大刹车减速度,包括:
5.根据权利要求4所述的车辆防追尾方法,其特征在于,在获取车辆的最大刹车减速度初值之后,该方法进一步包括:
6.根据权利要求5所述的车辆防追尾方法,其特征在于,获取校正后的车辆最大刹车减速度之后,所述方法还包括:基于最大刹车减速度的上限值和下限值,对车辆最大刹车减速度进行限制;具体地:
7.根据权利要求1所述的车辆防追尾方法,其特征在于,所述方法还包括:
8.一种用于无人车的车辆防追尾装置,其特征在于,所述装置包括:
9.一种计算机可读存储介质,其特征在于,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现如权利要求1至7任一项所述的用于无人车的车辆防追尾方法。
10.一种计算机设备,其特征在于,所述计算机设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述指令由所述处理器加载并执行以实现如权利要求1至7任一项所述的用于无人车的车辆防追尾方法。
技术总结
本申请公开了一种用于无人车的车辆防追尾方法和装置,属于自动驾驶技术领域。所述方法包括:获取车辆和后车的最小刹车距离;根据车辆和后车的最小刹车距离计算得出车辆和后车的安全报警距离;检测车辆与后车之间的距离;计算车辆与后车之间的距离是否小于安全报警距离;若车辆与后车之间的距离小于安全报警距离,则车辆发出声光报警信号提醒后车保持安全距离,否则车辆保持正常行驶。本申请获取车辆最大刹车减速度,进而计算得出安全报警距离,基于车辆间的实际距离与安全报警距离的关系发出报警信号,能够降低追尾事故的发生率,提高车辆驾驶的安全性。
技术研发人员:李勇,崔霄
受保护的技术使用者:九识(苏州)智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!