监测车辆轮胎的系统和方法与流程
一个或多个实施例涉及用于监测车辆轮胎状况的传感器系统。
背景技术:
1、车辆可以包括传感器系统,用于监测其外部环境以进行障碍物检测和规避。传感器系统可以包括用于监测近场中靠近车辆的障碍物和远场中的远处对象的多个传感器组件。每个传感器组件可以包括一个或多个传感器,例如摄像机、无线电检测和测距(雷达)传感器以及光检测和测距(激光雷达)传感器。激光雷达传感器包括用于从车辆发射光脉冲的一个或多个发射器以及用于接收和分析反射光脉冲的一个或多个检测器。传感器系统可以基于来自传感器的数据确定对象在外部环境中的位置。车辆可以基于对象的位置来控制一个或多个车辆系统,例如动力系统、制动系统和转向系统。
技术实现思路
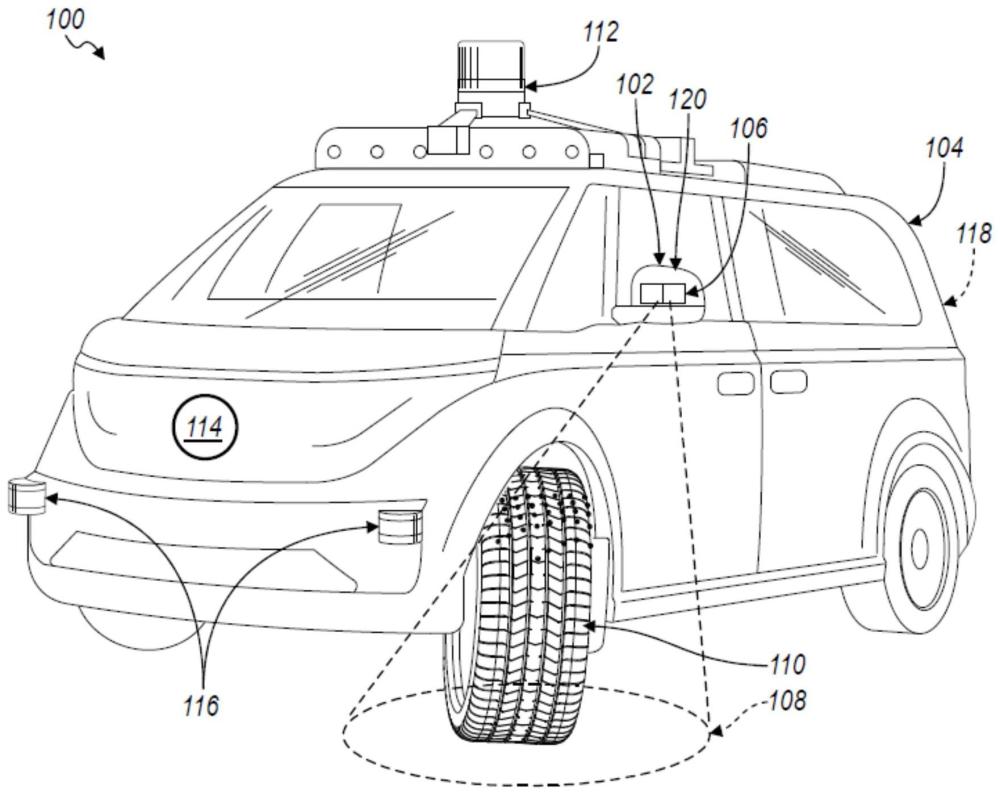
1、在一个实施例中,自主车辆(av)系统配备有传感器,传感器被配置为:接收从车辆附近的视场(fov)内的至少一个对象反射的光作为反射光,并且基于反射光提供指示传感器和延伸到fov中的车辆的轮胎表面之间的距离的轮胎数据。控制器被配置为响应于轮胎数据的概率分布的矩小于阈值或者轮胎数据指示阴影长度的变化率超过阈值阴影长度而生成消息,并且将消息提供给用户接口、车辆系统和外部计算设备中的至少一个。
2、在另一个实施例中,提供了一种监测轮胎状况的方法。传感器接收从车辆附近的视场(fov)内的至少一个对象反射的光作为反射光。轮胎数据指示传感器与延伸到fov中的车辆的轮胎表面之间的距离。响应于轮胎数据的概率分布的矩小于阈值,生成第一轮胎消息。响应于轮胎数据指示阴影长度的变化率超过阈值阴影长度,生成第二轮胎消息。第一轮胎消息或第二轮胎消息被提供给用户接口、车辆系统和外部计算设备中的至少一个。
3、提供了一种存储有指令的非暂时性计算机可读介质。指令在由至少一个计算设备执行时使得至少一个计算设备执行以下操作:提供指示传感器与延伸到车辆附近的视场(fov)中的车辆的轮胎表面之间的距离的轮胎数据;响应于轮胎数据的概率分布的矩小于阈值或者轮胎数据的第一阴影长度和第二阴影长度之间的差超过阈值阴影长度,生成消息;以及将消息提供给用户接口、车辆系统和外部计算设备中的至少一个。
技术特征:
1.一种自主车辆(av)系统,包括:
2.根据权利要求1所述的自主车辆系统,其中所述轮胎数据的概率分布的矩包括所述轮胎数据的标准偏差、方差、偏度和峰度中的一个。
3.根据权利要求1所述的自主车辆系统,其中所述传感器还被配置为:
4.根据权利要求1所述的自主车辆系统,其中所述传感器包括激光雷达传感器,并且其中所述概率分布的矩指示在跨过所述轮胎表面的一系列连续扫描内所述激光雷达传感器与所述轮胎表面的至少一个胎面段之间的第一距离与所述激光雷达传感器与所述轮胎表面的至少一个凹槽之间的第二距离之间的差。
5.根据权利要求1所述的自主车辆系统,其中所述传感器包括激光雷达传感器,并且其中所述轮胎表面包括共同延伸跨过所述轮胎的宽度的内部区域、中心区域和外部区域。
6.根据权利要求5所述的自主车辆系统,其中所述控制器还被配置为响应于所述轮胎数据的概率分布的矩小于所述表面的所述内部区域、所述中心区域和所述外部区域内的阈值而生成指示磨损消息的信号。
7.根据权利要求5所述的自主车辆系统,其中所述控制器还被配置为响应于所述轮胎数据的概率分布的矩小于所述表面的所述内部区域或所述外部区域内的阈值而生成指示未对准消息的信号。
8.根据权利要求5所述的自主车辆系统,其中所述控制器还被配置为:
9.根据权利要求1所述的自主车辆系统,其中所述传感器包括摄像机,并且其中所述摄像机还被配置为:
10.根据权利要求9所述的自主车辆系统,还包括:
11.根据权利要求10所述的自主车辆系统,其中所述控制器还被配置为:
12.一种监测轮胎状况的方法,包括:
13.根据权利要求12所述的方法,还包括:
14.根据权利要求12所述的方法,其中所述传感器是激光雷达传感器,所述方法还包括:
15.根据权利要求12所述的方法,其中所述传感器是激光雷达传感器,所述方法还包括:
16.根据权利要求12所述的方法,其中所述传感器是激光雷达传感器,所述方法还包括:
17.根据权利要求12所述的方法,其中所述传感器是摄像机,所述方法还包括:
18.根据权利要求17所述的方法,还包括:
19.一种存储有指令的非暂时性计算机可读介质,所述指令在由至少一个计算设备执行时,使得所述至少一个计算设备执行以下操作:
20.根据权利要求19所述的非暂时性计算机可读介质,其中所述操作还包括:
技术总结
本文公开了用于监测轮胎状况的系统和方法实施例。例如,系统包括传感器,传感器被配置为:接收从车辆附近的视场(FOV)内的至少一个对象反射的光作为反射光,并基于反射光提供指示传感器与延伸到FOV中的车辆轮胎表面之间的距离的轮胎数据。控制器被配置为响应于轮胎数据的概率分布的矩小于阈值或者轮胎数据指示阴影长度的变化率超过阈值阴影长度而生成消息,并且将消息提供给用户界面、车辆系统和外部计算设备中的至少一个。
技术研发人员:约瑟夫·维尼里
受保护的技术使用者:福特全球技术公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!