车辆泊车控制方法、装置、电子设备和计算机可读介质与流程
本公开的实施例涉及计算机,具体涉及车辆泊车控制方法、装置、电子设备和计算机可读介质。
背景技术:
1、高阶自动泊车技术运用车端、停车场端和高精地图端“三端合一”的技术方案,使无人驾驶的泊车全过程更加安全可靠。驾驶员仅需在固定点交接车辆,即可实现车辆自主寻找车位、停车入库、取车等代客泊车功能,同时支持地下、夜晚、雨雪天气等复杂停车场景下的智能代客泊车。目前,在进行车辆泊车控制时,通常采用的方式为:在高精地图中以定位坐标为起点,规划车辆泊车路径。
2、然而,发明人发现,当采用上述方式进行车辆泊车控制时,经常会存在如下技术问题:
3、由于存在高精地图未覆盖的停车场的情况,导致自动泊车功能对当前车辆在高精地图中的定位以及规划路径与车辆实际位置坐标之间存在偏差,从而,导致生成的车辆泊车规划路径与车辆实际位置不符,进而,导致难以更加准确地进行车辆泊车控制。
4、该背景技术部分中所公开的以上信息仅用于增强对本发明构思的背景的理解,并因此,其可包含并不形成本国的本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本公开的内容部分用于以简要的形式介绍构思,这些构思将在后面的具体实施方式部分被详细描述。本公开的内容部分并不旨在标识要求保护的技术方案的关键特征或必要特征,也不旨在用于限制所要求的保护的技术方案的范围。
2、本公开的一些实施例提出了车辆泊车控制方法、装置、电子设备和计算机可读介质,来解决以上背景技术部分提到的技术问题。
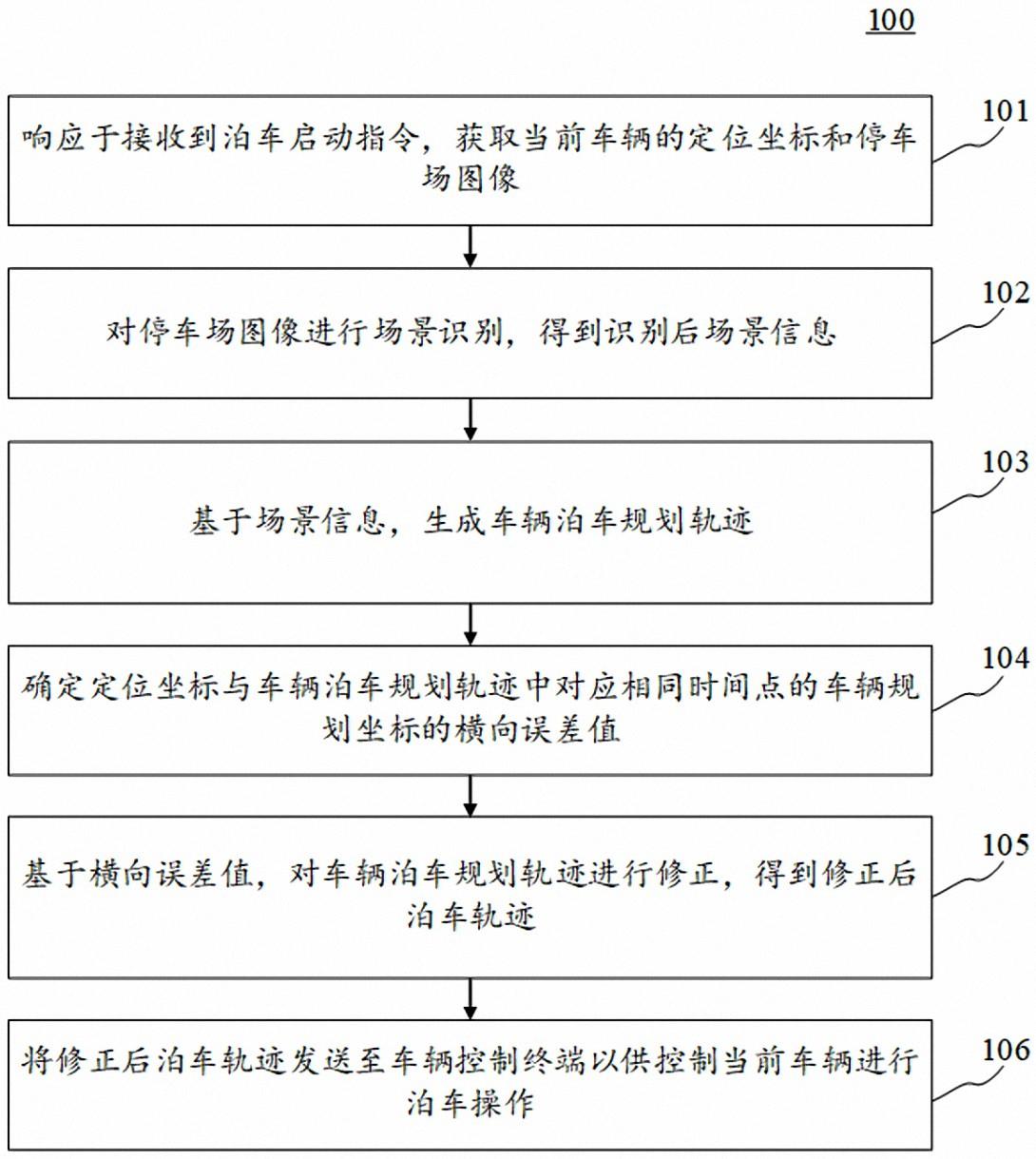
3、第一方面,本公开的一些实施例提供了一种车辆泊车控制方法,该方法包括:响应于接收到泊车启动指令,获取当前车辆的定位坐标和停车场图像;对上述停车场图像进行场景识别,得到识别后场景信息;基于上述场景信息,生成车辆泊车规划轨迹,其中,上述车辆泊车规划轨迹包括车辆规划坐标序列,车辆规划坐标序列中的每个车辆规划坐标对应一个时间点;确定上述定位坐标与上述车辆泊车规划轨迹中对应相同时间点的车辆规划坐标的横向误差值;基于上述横向误差值,对上述车辆泊车规划轨迹进行修正,得到修正后泊车轨迹;将上述修正后泊车轨迹发送至车辆控制终端以供控制当前车辆进行泊车操作。
4、第二方面,本公开的一些实施例提供了一种车辆泊车控制装置,该装置包括:获取单元,被配置成响应于接收到泊车启动指令,获取当前车辆的定位坐标和停车场图像;场景识别单元,被配置成对上述停车场图像进行场景识别,得到识别后场景信息;轨迹生成单元,被配置成基于上述场景信息,生成车辆泊车规划轨迹,其中,上述车辆泊车规划轨迹包括车辆规划坐标序列,车辆规划坐标序列中的每个车辆规划坐标对应一个时间点;确定单元,被配置成确定上述定位坐标与上述车辆泊车规划轨迹中对应相同时间点的车辆规划坐标的横向误差值;修正单元,被配置成基于上述横向误差值,对上述车辆泊车规划轨迹进行修正,得到修正后泊车轨迹;发送以及控制单元,被配置成将上述修正后泊车轨迹发送至车辆控制终端以供控制当前车辆进行泊车操作。
5、第三方面,本公开的一些实施例提供了一种电子设备,包括:一个或多个处理器;存储装置,其上存储有一个或多个程序,当一个或多个程序被一个或多个处理器执行,使得一个或多个处理器实现上述第一方面任一实现方式所描述的方法。
6、第四方面,本公开的一些实施例提供了一种计算机可读介质,其上存储有计算机程序,其中,程序被处理器执行时实现上述第一方面任一实现方式所描述的方法。
7、本公开的上述各个实施例具有如下有益效果:通过本公开的一些实施例的车辆泊车控制方法,可以更加准确地进行车辆泊车控制。具体来说,造成难以更加准确地进行车辆泊车控制的原因在于:由于存在高精地图未覆盖的停车场的情况,导致自动泊车功能对当前车辆在高精地图中的定位以及规划路径与车辆实际位置坐标之间存在偏差,从而,导致生成的车辆泊车规划路径与车辆实际位置不符,进而。基于此,本公开的一些实施例的车辆泊车控制方法,首先,响应于接收到泊车启动指令,获取当前车辆的定位坐标和停车场图像。通过获取当前车辆的定位坐标可以初步确定车辆的位置。然后,对上述停车场图像进行场景识别,得到识别后场景信息。通过场景识别,可以便于为后续泊车路径规划做场景数据支撑。之后,基于上述场景信息,生成车辆泊车规划轨迹。其中,上述车辆泊车规划轨迹包括车辆规划坐标序列,车辆规划坐标序列中的每个车辆规划坐标对应一个时间点。这里,通过生成车辆泊车规划轨迹可以用于控制车辆进行自动泊车。而后,确定上述定位坐标与上述车辆泊车规划轨迹中对应相同时间点的车辆规划坐标的横向误差值。通过确定横向误差值,可以用于表征车辆实际定位位置与车辆泊车路径中位置坐标的误差。接着,基于上述横向误差值,对上述车辆泊车规划轨迹进行修正,得到修正后泊车轨迹。通过引入横向误差值,可以用于修正车辆泊车规划轨迹,以便生成更加符合当前车辆所在位置的修正后泊车轨迹。最后,将上述修正后泊车轨迹发送至车辆控制终端以供控制当前车辆进行泊车操作。从而,可以极大地消除规划路径上的坐标与车辆实际位置坐标之间存在偏差,使得可以更加准确地进行车辆泊车控制。
技术特征:
1.一种车辆泊车控制方法,包括:
2.根据权利要求1所述的方法,其中,所述获取当前车辆的定位坐标和停车场图像,包括:
3.根据权利要求1所述的方法,其中,所述对所述停车场图像进行场景识别,得到识别后场景信息,包括:
4.根据权利要求3所述的方法,其中,所述泊车启动指令包括泊车车位坐标;以及
5.根据权利要求1所述的方法,其中,所述基于所述横向误差值,对所述车辆泊车规划轨迹进行修正,得到修正后泊车轨迹,包括:
6.根据权利要求5所述的方法,其中,所述方法还包括:
7.根据权利要求6所述的方法,其中,所述方法还包括:
8.根据权利要求1-7之一所述的方法,其中,所述方法还包括:
9.一种车辆泊车控制装置,包括:
10.一种电子设备,包括:
技术总结
本公开的实施例公开了车辆泊车控制方法、装置、电子设备和计算机可读介质。该方法的一具体实施方式包括:响应于接收到泊车启动指令,获取当前车辆的定位坐标和停车场图像;对停车场图像进行场景识别,得到识别后场景信息;基于场景信息,生成车辆泊车规划轨迹,其中,车辆泊车规划轨迹包括车辆规划坐标序列,车辆规划坐标序列中的每个车辆规划坐标对应一个时间点;确定定位坐标与车辆泊车规划轨迹中对应相同时间点的车辆规划坐标的横向误差值;基于横向误差值,对车辆泊车规划轨迹进行修正,得到修正后泊车轨迹;将修正后泊车轨迹发送至车辆控制终端以供控制当前车辆进行泊车操作。该实施方式可以更加准确地进行车辆泊车控制。
技术研发人员:郑小翔
受保护的技术使用者:禾昆科技(北京)有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!