车辆的转弯行为控制装置的制作方法
本发明涉及一种车辆的转弯行为控制装置,该车辆的转弯行为控制装置在转弯时检测到较强的不足转向的程度的情况下,高效地降低该不足转向的程度。
背景技术:
1、在作为自动转向控制的行驶轨迹控制(也称为“车道保持控制”)中,若车辆的目标行驶轨迹与车辆的实际的行驶轨迹之间的偏差变大,则对转向轮进行转向,以使实际的行驶轨迹收敛于目标行驶轨迹的方式进行反馈控制。例如,若车辆的实际的行驶轨迹的转弯半径变得比作为目标行驶轨迹而设定的转弯半径大,并且它们的差变大,则作用于车辆的不足转向的程度变强,因此转向控制装置使转向轮向增加偏转方向转向而将转弯半径向作为目标行驶轨迹而设定的转弯半径侧校正。
2、但是,例如在前轮为转向轮且为驱动轮的情况下,转弯内侧前轮的接地载荷因随着转弯而作用于车辆的横向的载荷移动而降低。因此,即使使转弯内侧前轮向增加偏转方向转向,转弯内侧前轮的横向力也不会充分地增加,无法对车辆赋予所需的横摆力矩。其结果是,难以使车辆的实际的行驶轨迹收敛于目标行驶轨迹。
3、作为其对策,例如在专利文献1(日本特开2020-50024号公报)中公开了如下技术:在转弯时,在车辆的标准横摆率(目标横摆率)与实际横摆率之间的偏差超过预先设定的偏差基准值且偏差的时间变化率超过开始基准值的情况下,通过对转弯内侧的驱动轮赋予制动力,产生从转弯外侧的驱动轮向转弯内侧的驱动轮的载荷移动,从而使转弯内侧的驱动轮的接地载荷增大。
4、现有技术文献
5、专利文献
6、专利文献1:日本特开2020-50024号公报
技术实现思路
1、技术问题
2、然而,在检测到较强的不足转向的程度的初始的阶段,若对转弯内侧的驱动轮施加过渡性的载荷移动,则能够高效地降低不足转向的程度。
3、但是,在专利文献1所公开的技术中,在检测到较强的不足转向的程度时,仅仅是对转弯内侧的驱动轮持续赋予恒定的制动力而从转弯外侧的驱动轮向转弯内侧的驱动轮产生静态的载荷移动,因此难以在初始的阶段高效地降低不足转向的程度。其结果是,在用于减轻不足转向的程度的控制中产生延迟,给包括驾驶员在内的搭乘者带来不适感。
4、本发明的目的在于提供一种车辆的转弯行为控制装置,在检测到较强的不足转向的程度时,能够高效地降低该不足转向的程度,减轻给包括驾驶员在内的搭乘者带来的不适感。
5、技术方案
6、本发明是左右前轮为转向轮的车辆的转弯行为控制装置,所述车辆的转弯行为控制装置具备:横摆率检测部,其检测作用于本车辆的实际横摆率;制动部,其对四轮独立地赋予制动力;驱动源,其对所述左右前轮和左右后轮进行驱动;以及行驶控制部,其控制所述制动部的制动力和所述驱动源的输出,所述行驶控制部具备:偏差值计算部,其计算判定在所述本车辆的转弯时的不足转向的程度的标准横摆率与由所述横摆率检测部检测出的所述实际横摆率之间的偏差;制动力控制部,其在判定为由所述偏差值计算部计算出的所述偏差超过了预先设定的偏差基准值的情况下,对所述制动部输出向转弯内侧后轮与转弯内侧前轮中的一者赋予所述制动力的信号;以及驱动力控制部,其在所述制动力控制部对所述制动部输出了对所述转弯内侧后轮或所述转弯内侧前轮赋予所述制动力的信号的情况下,对所述驱动源输出向转弯外侧后轮与转弯外侧前轮中的一者赋予驱动力的信号。
7、技术效果
8、根据本发明,行驶控制部在判定为判定本车辆的转弯时的不足转向的程度的标准横摆率与由所述横摆率检测部检测出的所述实际横摆率之间的偏差超过了预先设定的偏差基准值的情况下,对转弯内侧后轮与转弯内侧前轮中的一者赋予制动力。此时,由于对转弯外侧后轮与转弯外侧前轮中的一者赋予驱动力,所以在检测到较强的不足转向的程度时,通过制动力与驱动力之间的协调而高效地降低不足转向的程度,从而能够减轻给包括驾驶员在内的搭乘者带来的不适感。
技术特征:
1.一种车辆的转弯行为控制装置,其特征在于,是左右前轮为转向轮的车辆的转弯行为控制装置,所述车辆的转弯行为控制装置具备:
2.根据权利要求1所述的车辆的转弯行为控制装置,其特征在于,
3.根据权利要求2所述的车辆的转弯行为控制装置,其特征在于,
4.根据权利要求2所述的车辆的转弯行为控制装置,其特征在于,
5.根据权利要求1所述的车辆的转弯行为控制装置,其特征在于,
技术总结
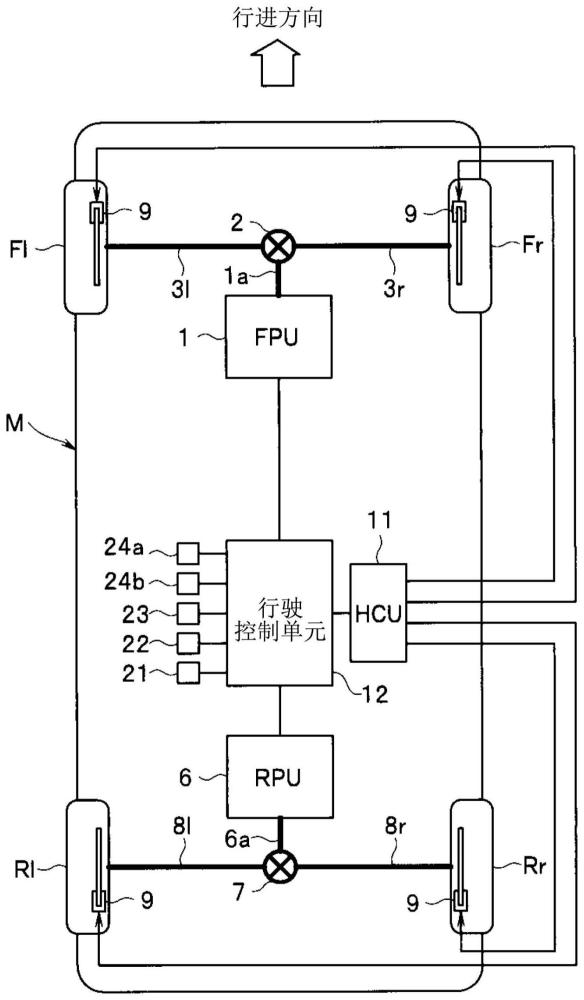
本发明提供在转弯时检测到较强的不足转向的程度的情况下,能够高效地降低该不足转向的程度的车辆的转弯行为控制装置。行驶控制单元(12)具有制动力控制部和驱动力控制部,在制动力控制部计算出判定本车辆(M)的转弯时的不足转向的程度的标准横摆率与实际横摆率之间的偏差ΔYr,并判定为该偏差ΔYr超过了预先设定的偏差基准值Yrc的情况下,对转弯内侧后轮(Rl)与转弯内侧前轮(Fl)中的一者赋予制动力(Fb)。另外,在制动力控制部对转弯内侧后轮(Rl)或转弯内侧前轮赋予了制动力(Fb)的情况下,驱动力控制部对转弯外侧后轮(Rr)与转弯外侧前轮(Fr)中的一者赋予驱动力(Fd)。
技术研发人员:小阪望,齐藤正容,松野浩二,前田義纪,本村豊幸
受保护的技术使用者:株式会社斯巴鲁
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!