一种基于逻辑门限的矿车紧急制动防抱死控制方法
本发明涉及无人驾驶矿车,特别涉及一种基于逻辑门限的矿车紧急制动防抱死控制方法。
背景技术:
1、矿山生产作业环境都是比较恶劣的,为了减轻驾驶员的作业强度,提高生产效率,无人驾驶技术在矿山领域正在扮演愈发重要的角色,但是矿山道路往是非结构化路面,路面条件都比较恶劣,一旦遇到下雨天或者下雪天,甚至矿山因为防尘要求进行洒水作业后,路面会变得比较泥泞,道路附着条件急剧恶化,矿山环境突发情况较多,矿车一旦遇到滚石或者其他突发情况就必须采取紧急制动,由于矿车属于特种车辆,运行速度不高,载重非常大,安装该套件不仅成本高昂,在矿车正常运行速度下,熟练驾驶员都能采取点刹使得车轮避免抱死、车辆不甩尾,所以不易发生险情,故而矿车一般是没有防抱死制动控制套件的,但是在自动驾驶条件下,自动驾驶系统无法判断车轮是否抱死,也无法采取点刹,此时极易产生车轮抱死现象,从而产生险情,此时对矿车进行制动防抱死控制是必要的。
技术实现思路
1、本发明所要解决的技术问题是要提供一种基于逻辑门限的矿车紧急制动防抱死控制方法,提高矿车行驶安全性。
2、为了解决以上的技术问题,本发明提供了一种基于逻辑门限的矿车紧急制动防抱死控制方法,对矿车的轮速进行实时计算,并根据惯导车速和轮速实时计算车轮角加速度和车轮滑移率,并基于逻辑门限策略,利用矿车自带的两套并行的液压制动系统进行紧急制动过程中的液压制动控制,达到紧急制动防抱死;包括如下步骤:
3、步骤s1:在矿车四轮安装轮速传感器;
4、步骤s2:实时计算轮速;
5、步骤s3:根据车辆惯性导航系统提供的车速信息以及上述计算得到轮速信息实时计算前后轮平均角加速度和车轮平均滑移率;
6、步骤s4:根据角加速度和滑移率计算值,按照标定好的参数表,使用逻辑门限策略控制矿车的前后液压制动数值,进行紧急制动防抱死。
7、所述轮速传感器齿圈共有齿数n个,轮胎直径为r(单位为m),轮速的计算周期为p(单位为s),在一个计算周期内,轮速传感器的感应探头共感应到齿圈转动n1个齿,则车轮转速ωt(单位为rad/s)和换算轮速vt(单位为m/s)实时计算如下:
8、
9、上一个防抱死控制的计算周期内车轮转速为ωt1,当前计算周期内车路转速为ωt2,计算周期为p1,则角加速度α的计算方式如下:
10、
11、车辆惯性导航系统提供的车速为v(单位为m/s),则车轮滑移率计算方式如下:
12、
13、矿车上自带有两套并行作用的液压制动系统,分别为紧急制动液压制动系统和一般制动液压制动系统,两套制动系统分别对应前轴、后轴的前后两路制动,前后两路的最大液压值不同,前轴、后轴的左右两轮液压值相同,紧急制动和一般制动的最大制动液压相同,紧急制动相比一般制动响应更加迅速,紧急制动系统只能接受0或者1的指令,即是无液压作用,或是最大液压作用。一般制动系统接受0-100%之间任意百分比的液压指令,相应的,产生最大液压的0-100%之间的任意液压值。
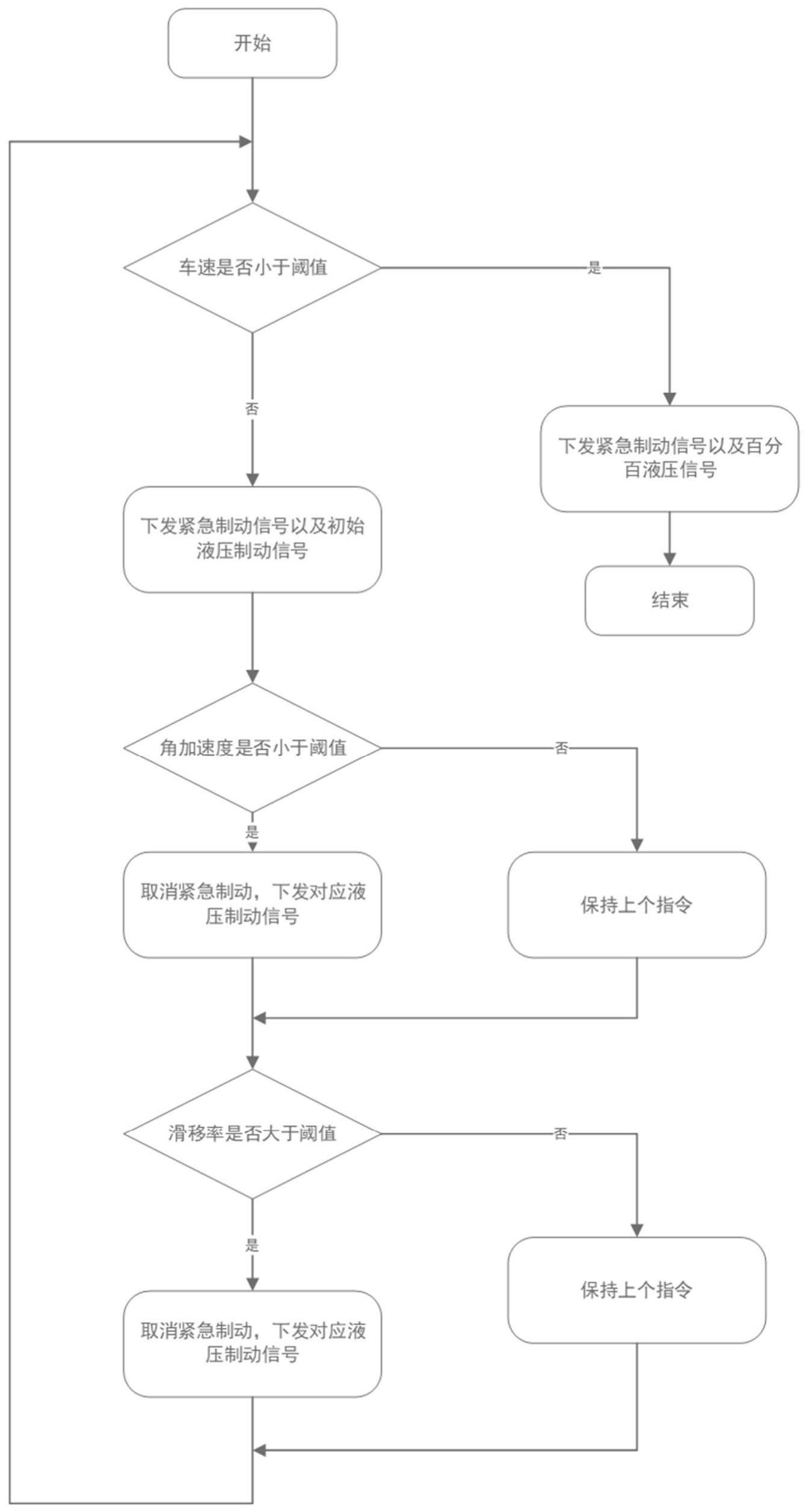
14、使用逻辑门限策略控制矿车的前后液压制动数值,进行紧急制动防抱死,包括如下的步骤:
15、步骤s41:判断车速是否小于阀值,
16、是,转步骤s44;
17、否,给紧急制动系统下发开启指令、给一般制动系统下发一个初始液压制动百分比;
18、步骤s42:判断车轮角加速度是否小于阀值,
19、是,给紧急制动系统下发关闭指令、给一般制动系统下发一个与之对应的液压制动百分比;转步骤s43;
20、否,保持上个指令;转步骤s43;
21、步骤s43:判断车轮滑移率是否大于阀值,
22、是,给一般制动系统下发一个与之对应的液压制动百分比;转步骤s41;
23、否,保持上个指令;转步骤s41;
24、步骤s44:车速低于阈值,给紧急制动系统下发开启指令、给一般制动系统下发100%指令,直至矿车停止。
25、本发明的优越功效在于:节省了加装防抱死制动控制套件的成本,也省去了对原有制动管路进行改装带来的高昂的设备和人力成本,同时也避免了矿车改装带来的检修更为困难的问题,仅需加装轮速传感器即可实现功能,目前矿车一般都没有防抱死制动控制功能,该功能可以有效避免矿车自动驾驶过程中的紧急制动车轮抱死拖滑、车辆甩尾等问题,提高矿车行驶安全性,为矿车自动驾驶落地提供助力。
技术特征:
1.一种基于逻辑门限的矿车紧急制动防抱死控制方法,其特征在于:对矿车的轮速进行实时计算,并根据惯导车速和轮速实时计算车轮角加速度和车轮滑移率,并基于逻辑门限策略,利用矿车自带的两套并行的液压制动系统进行紧急制动过程中的液压制动控制,达到紧急制动防抱死。
2.根据权利要求1所述的一种基于逻辑门限的矿车紧急制动防抱死控制方法,其特征在于:包括如下步骤:
3.根据权利要求2所述的一种基于逻辑门限的矿车紧急制动防抱死控制方法,其特征在于:所述步骤s4包括如下的步骤:
技术总结
本发明公开一种基于逻辑门限的矿车紧急制动防抱死控制方法,对矿车的轮速进行实时计算,并根据惯导车速和轮速实时计算车轮角加速度和车轮滑移率,并基于逻辑门限策略,利用矿车自带的两套并行的液压制动系统进行紧急制动过程中的液压制动控制,达到紧急制动防抱死。本发明的优点是节省了加装防抱死制动控制套件的成本,提高了矿车行驶的安全性。
技术研发人员:吴光强,毛礼波,张栋,姜舒怀
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!