车辆的预警控制方法及装置、车辆和存储介质与流程
本发明涉及车辆,尤其是涉及一种车辆的预警控制方法及装置、车辆和存储介质。
背景技术:
1、当今车辆已经从出行的交通工具转变为人们娱乐消遣的玩具,很多人买车并非生活所需,而是为了旅行、游玩,例如越野车辆一直深受年轻消费者的追捧,越野车辆可以去到一般车辆到不了的场地,可以带给消费者很大的驾驶乐趣和刺激,例如沙漠越野是很多人追求的向往的地方,但沙漠越野需要较多的沙漠驾驶经验,越野驾驶新手在沙漠驾驶非常容易陷车。
2、目前,车辆在平整路况行驶时,使用esp(electronic stability program,电子车身稳定系统)控制车辆的行驶性能,例如在侧倾角度大于理论侧倾角度时,发送报警信号,并将理论侧倾角度发送至转角限制单元,计算车轮转角,并根据esp对车轮转角进行控制,保证车辆平稳行驶。
3、然而,当车辆在沙漠越野路况时,esp功能被关闭,通过预先提前标定,可以确保车辆能够适应更多地场景和工况,但无法对沙漠驾驶的危险性进行充分提醒,并且通常是在引发险情的动作后进行提示或干预,容易出现驾驶员误操作,从而引发安全事故。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。
2、为此,本发明的一个目的在于提出一种车辆的预警控制方法,该方法通过发出预警信息,在引发险情动作前进行警示,降低驾驶员误操作概率,提高车辆行驶安全。
3、为此,本发明的第二个目的在于提出一种车辆的预警控制装置。
4、为此,本发明的第三个目的在于提出一种车辆。
5、为此,本发明的第四个目的在于提出一种非临时性计算机可读存储介质。
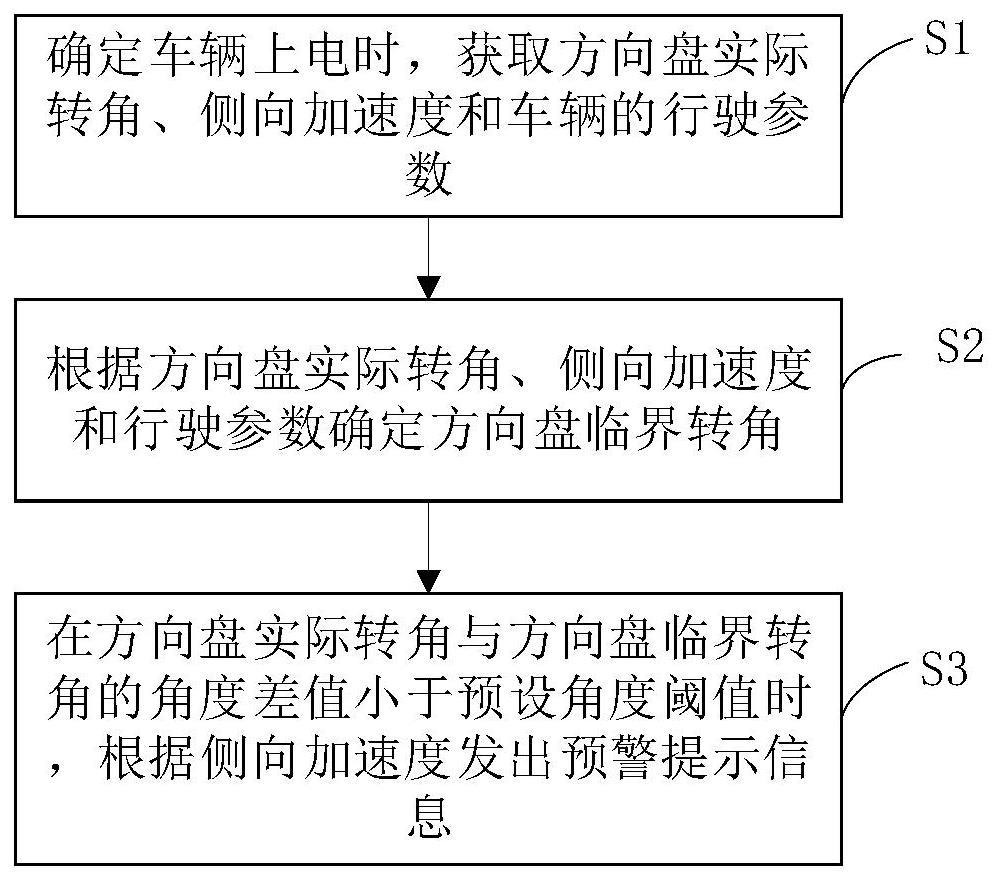
6、为了达到上述目的,本发明的第一方面的实施例提出了一种车辆的预警控制方法,所述方法包括:确定车辆上电时,获取方向盘实际转角、侧向加速度和车辆的行驶参数;根据所述方向盘实际转角、所述侧向加速度和所述行驶参数确定所述方向盘临界转角;在所述方向盘实际转角与所述方向盘临界转角的角度差值小于预设角度阈值时,根据所述侧向加速度发出预警提示信息。
7、根据本发明实施例的车辆的预警控制方法,通过实时计算方向盘临界转角,并比较方向盘临界转角和方向盘实际转角之间的关系,对车辆的行驶状态进行实时监控,并在车辆的方向盘转角与方向盘临界转角之间的角度差值小于预设角度阈值时,认为车辆存在侧翻风险,并根据车辆加速度发出预警信息,在引发险情动作前进行警示,为驾驶员正确操作方向盘提供基础,从而降低驾驶员误操作概率,有效防止车辆侧翻,提高车辆行驶安全。
8、在一些实施例中,根据所述侧向加速度发出预警提示信息,包括:判断所述侧向加速度的方向是否为预设方向;若是,发出第一预警提示信息;否则,发出第二预警提示信息。
9、在一些实施例中,根据所述方向盘实际转角、所述侧向加速度和所述行驶参数确定所述方向盘临界转角,包括:根据所述方向盘实际转角、所述侧向加速度和所述行驶参数确定所述车辆的侧倾角度;根据所述侧倾角度和所述行驶参数确定所述方向盘临界转角。
10、在一些实施例中,所述行驶参数包括车辆的行驶速度、车辆轴距、车辆质量和车辆的后轮转角与方向盘实际转角的比值,根据所述方向盘实际转角、所述侧向加速度和所述行驶参数确定车辆的侧倾角度,包括:
11、
12、其中,d为车辆轴距,m为车辆质量,v为行驶速度,g为重力加速度,i为车辆的后轮转角与方向盘实际转角的比值,θ为所述方向盘实际转角,ay为所述侧向加速度,δ为侧倾角度。
13、在一些实施例中,所述行驶参数包括车辆的行驶速度、车辆轴距、车辆轮距及车辆质心高度,根据所述侧倾角度和所述行驶参数确定所述方向盘临界转角,包括:
14、
15、其中,δ为侧倾角度,k1和k2为变换系数,d为车辆轴距,v为行驶速度,s为车辆质心高度,l为车辆轮距。
16、在一些实施例中,确定车辆上电之后,还包括:响应于车辆设定行驶指令,控制车辆进入设定行驶模式。
17、在一些实施例中,在所述方向盘实际转角与所述方向盘临界转角的角度差值大于或等于预设角度阈值时,不发出所述预警提示信息。
18、为了达到上述目的,本发明的第二方面的实施例提出了一种车辆的预警控制装置,所述装置包括:获取模块,用于确定车辆上电时,获取方向盘实际转角、侧向加速度和车辆的行驶参数;确定模块,用于根据所述方向盘实际转角、所述侧向加速度和所述行驶参数确定所述方向盘临界转角;预警模块,用于在所述方向盘实际转角与所述方向盘临界转角的角度差值小于预设角度阈值时,根据所述侧向加速度发出预警提示信息。
19、根据本发明实施例的车辆的预警控制装置,通过实时计算方向盘临界转角,并比较方向盘临界转角和方向盘实际转角之间的关系,对车辆的行驶状态进行实时监控,并在车辆的方向盘转角与方向盘临界转角之间的角度差值小于预设角度阈值时,认为车辆存在侧翻风险,并根据车辆加速度发出预警信息,在引发险情动作前进行警示,为驾驶员正确操作方向盘提供基础,从而降低驾驶员误操作概率,有效防止车辆侧翻,提高车辆行驶安全。
20、为了达到上述目的,本发明的第三方面的实施例提出了一种车辆,所述车辆包括如上述实施例所述的车辆的预警控制装置。
21、根据本发明实施例的车辆,通过实时计算方向盘临界转角,并比较方向盘临界转角和方向盘实际转角之间的关系,对车辆的行驶状态进行实时监控,并在车辆的方向盘转角与方向盘临界转角之间的角度差值小于预设角度阈值时,认为车辆存在侧翻风险,并根据车辆加速度发出预警信息,在引发险情动作前进行警示,为驾驶员正确操作方向盘提供基础,从而降低驾驶员误操作概率,有效防止车辆侧翻,提高车辆行驶安全。
22、为了达到上述目的,本发明的第四方面的实施例提出了一种非临时性计算机可读存储介质,所述非临时性计算机可读存储介质上存储有车辆的预警控制程序,所述车辆的预警控制程序被处理器执行时实现如上述实施例所述的车辆的预警控制方法。
23、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
24、附图说明
25、本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
26、图1是根据本发明一个实施例的车辆的预警控制方法的流程图;
27、图2是根据本发明一个实施例的车辆的预警控制方法的流程图;
28、图3是根据本发明一个实施例的车辆的预警控制装置的结构框图;
29、图4是根据本发明一个实施例的车辆的结构框图。
技术特征:
1.一种车辆的预警控制方法,其特征在于,包括:
2.根据权利要求1所述的车辆的预警控制方法,其特征在于,根据所述侧向加速度发出预警提示信息,包括:
3.根据权利要求1所述的车辆的预警控制方法,其特征在于,根据所述方向盘实际转角、所述侧向加速度和所述行驶参数确定所述方向盘临界转角,包括:
4.根据权利要求3所述的车辆的预警控制方法,其特征在于,所述行驶参数包括车辆的行驶速度、车辆轴距、车辆质量和车辆的后轮转角与方向盘实际转角的比值,根据所述方向盘实际转角、所述侧向加速度和所述行驶参数确定车辆的侧倾角度,包括:
5.根据权利要求3所述的车辆的预警控制方法,其特征在于,所述行驶参数包括车辆的行驶速度、车辆轴距、车辆轮距及车辆质心高度,根据所述侧倾角度和所述行驶参数确定所述方向盘临界转角,包括:
6.根据权利要求1所述的车辆的预警控制方法,其特征在于,确定车辆上电之后,还包括:
7.根据权利要求1所述的车辆的预警控制方法,其特征在于,还包括:
8.一种车辆的预警控制装置,其特征在于,包括:
9.一种车辆,其特征在于,包括如权利要求8所述的车辆的预警控制装置。
10.一种非临时性计算机可读存储介质,其特征在于,所述非临时性计算机可读存储介质上存储有车辆的预警控制程序,所述车辆的预警控制程序被处理器执行时实现如权利要求1-7任一项所述的车辆的预警控制方法。
技术总结
本发明提出一种车辆的预警控制方法及装置、车辆和存储介质,方法包括:确定车辆上电时,获取方向盘实际转角、侧向加速度和车辆的行驶参数;根据方向盘实际转角、侧向加速度和行驶参数确定方向盘临界转角;在方向盘实际转角与方向盘临界转角的角度差值小于预设角度阈值时,根据侧向加速度发出预警提示信息,本发明通过发出预警信息,在引发险情动作前进行警示,降低驾驶员误操作概率,提高车辆行驶安全。
技术研发人员:路乐乐,刘逸涵,张宁宁,张宗斌,马龙兴,边远,李慧鹏,巩欢笑,顾立夫,刘天培,李建民
受保护的技术使用者:长城汽车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!