一种用于无人驾驶矿卡的线控集成控制单元及控制方法与流程
本发明属于无人驾驶矿卡控制,具体涉及一种用于无人驾驶矿卡的线控集成控制单元及控制方法。
背景技术:
1、鉴于目前矿区工作运营效率低等原因,矿区高效智能化的呼声越来越高。然而,当前矿区无人驾驶领域缺乏专业和成熟的矿用车辆线控执行装置,同时线控系统的安装和调试周期也较长。
2、目前在中国专利cn202210445996.1中只提到了矿车线控系统的组成模块和结构,没有明确无人驾驶系统线控控制器的控制功能,及其如何同无人驾驶系统和线控子系统交互。
3、总体来说,现有线控技术中存在如下问题:系统线控难以满足无人驾驶系统对各线控子系统的故障诊断与上报,影响了整个系统的稳定性;无法充分兼容不同车型;难以兼容有人驾驶和无人驾驶,从而限制了车辆使用场景,直接影响车辆运行效率。另外,现有线控系统缺乏完善的自诊断功能,无人驾驶系统出现问题时不能自动判断线控问题节点和原因,故需要手动分析原始数据而耗费较多时间。
技术实现思路
1、鉴于上述分析,本发明提供了一种用于无人驾驶矿卡的线控集成控制单元及控制方法,用以解决将实现矿用车辆线控化和智能化,为矿卡无人驾驶系统提供安全可靠的线控集成装置并缩短新车型线控系统开发周期。
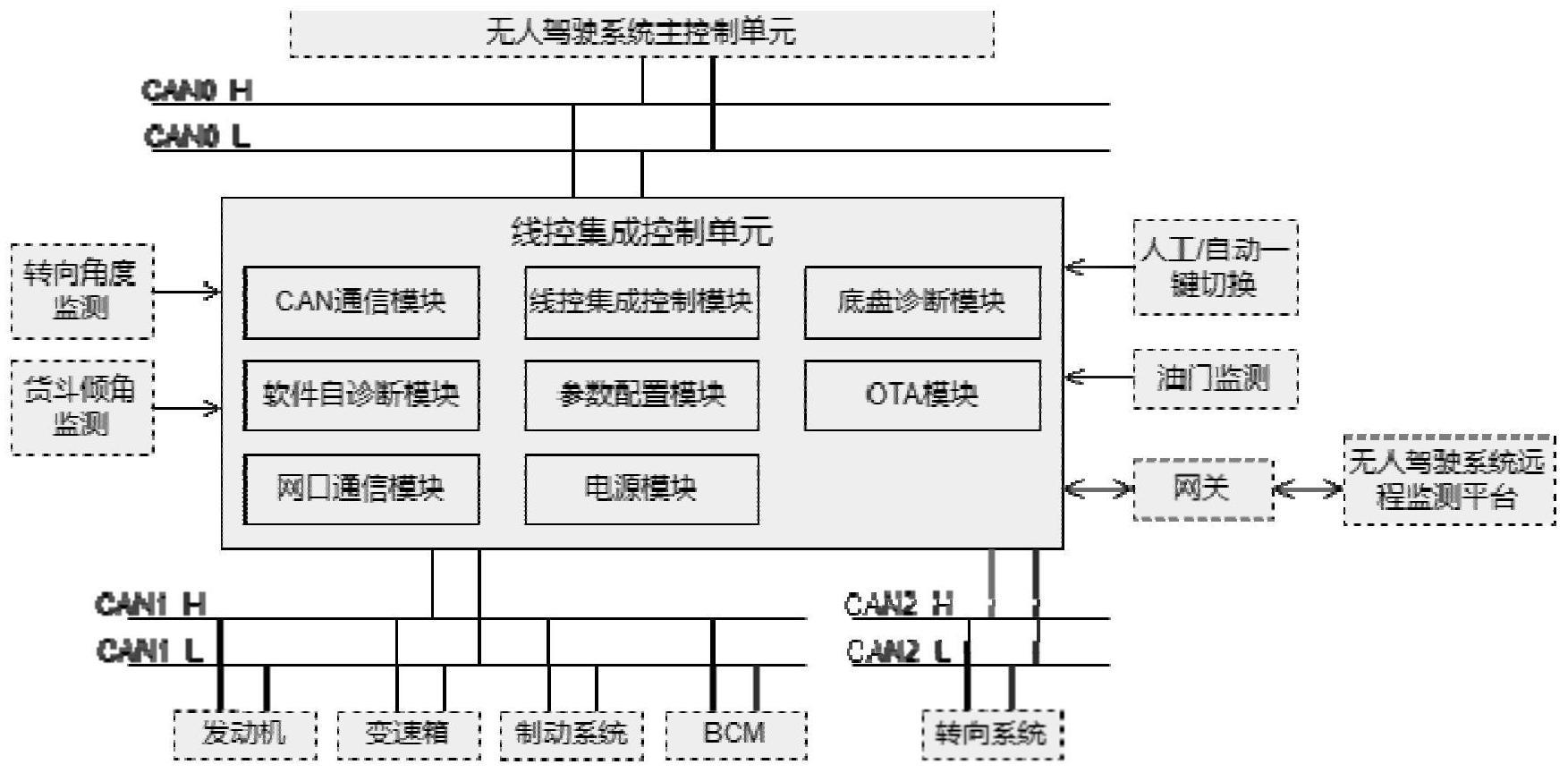
2、本发明一方面,提供了一种用于无人驾驶矿卡的线控集成控制单元,用于无人驾驶系统中车辆的线控集成控制终端,包括主控芯片、can通信芯片、232通信芯片、电源管理芯片、网络通信芯片、线控集成控制模块、底盘线控诊断模块、自诊断模块、can通信模块、网口通信模块、参数配置模块、ota在线升级模块和电源模块;主控芯片、can通信芯片、232通信芯片、电源管理芯片和网络通信芯片接口设备通过硬件线路实现互联;接口设备包括模拟量采集与输出接口、开关量输入输出接口、232串口通信接口、网口和can通信接口。
3、可选地,线控集成控制单元通过can总线与无人驾驶矿卡的无人驾驶系统的主控单元进行通讯和数据传输;用于收集车辆底盘控制和车辆信息,并对控制过程中的异常原因进行反馈。
4、可选地,无人驾驶矿卡的无人驾驶系统通过can总线与线控底盘连接。
5、可选地,线控集成控制模块,通过can1总线和车辆底盘各部件进行通信和数据传输;通过can2总线和转向系统进行通信和数据传输;通过模拟量采集与输出接口对无人驾驶矿卡的前轮转向角度、货斗倾角、油门开度和人工及自动切换按键进行监测;通过无人驾驶系统远程监测平台和网关控制器实现参数配置和ota功能;无人驾驶系统读取线控集成控制单元的各线控子系统反馈的数据,解析和分级各线控子系统反馈的数据,将故障信息反馈到无人驾驶系统主控制单元,实现车辆线控状态诊断和上报。
6、可选地,自诊断模块用于对执行异常的动作进行节点分析,快速找到异常原因并上报到驾驶室中的人机交互屏幕和无人驾驶系统远程监测平台;通过监测数据链路上的关键节点,当发现实际执行动作响应与预期不符时,诊断线控执行部件异常并上报。
7、可选地,底盘线控诊断模块用于实时监测底盘故障信息,实时处理反馈的故障数据,得到故障原因和等级,反馈给控制器1,作为无人驾驶系统决策的重要依据。
8、可选地,参数配置模块用于获取无人驾驶系统远程监测平台下发的配置参数数据,根据车型通过无人驾驶系统远程监测平台配置并下发参数到线控集成控制单元,实现对不同车型的灵活适配,实现对不同车型的控制;同时线控集成控制单元将配置参数保存到内部存储空间,后续启动时即可直接读取。
9、本发明另一方面,还提供了一种用于无人驾驶矿卡的线控集成控制方法,使用前述的用于无人驾驶矿卡的线控集成控制单元,具体步骤如下:
10、无人驾驶系统的决策模块通过雷达和摄像机获取实时数据;
11、无人驾驶系统主控制单元根据实时数据规划的行驶路径,结合无人驾驶矿卡的横向、纵向和航向角偏差,通过运动控制算法,计算无人驾驶矿卡的运动控制数据;将运动控制数据发送到线控集成控制单元;
12、线控集成控制单元通过线控集成控制模块对接收的运动控制数据进行处理并通过can总线发送给线控底盘;线控底盘各部件反馈自身的状态数据到线控集成控制单元,线控集成控制单元通过线控集成控制模块对接收的底盘数据进行处理并通过can总线发送给无人驾驶系统主控制单元;
13、当线控集成控制单元接收到无人驾驶系统主控制单元的运动控制数据后,自诊断模块触发对应控制指令的判断逻辑,对线控集成控制单元的执行过程和结果进行监测,对执行异常的动作进行节点分析,快速找到异常原因并上报到hmi和无人驾驶系统远程监测平台;
14、无人驾驶矿卡运行过程中,底盘各部件产生can报文数据,底盘线控诊断模块解析底盘各部件反馈的can报文数据,实时监测底盘故障信息,使用故障诊断算法实时处理反馈的故障数据,得到故障原因和等级,反馈给无人驾驶系统主控制单元,作为无人驾驶系统的决策模块进行决策的重要依据;
15、参数配置模块通过网关控制器获取网络数据,实现了对不同车型的灵活适配,通过无人驾驶系统远程监测平台或使用参数配置工具配置不同的参数,实现对不同车型的控制,同时线控集成控制单元会把收到的配置参数保存到内部存储空间,后续启动时即可直接读取;
16、线控集成控制单元对人工自动模式切换按钮位置、人工油门、转向角度传感器反馈电压及货斗倾角等进行实时监测;
17、针对有人和无人驾驶不同场景分别设计控制逻辑,在有人驾驶模式下只提供车辆状态检测,故障上报等功能,不再响应任何无人驾驶系统发出的控制指令;在无人驾驶模式下且不存在车辆故障时,才响应无人驾驶系统发出的控制指令,并优先响应人工刹车和人工转向操作,但不响应人工油门和人工换挡操作,以保证车辆安全运行。
18、本发明至少具有如下有益效果:
19、(1)本发明的执行机构能够对无人驾驶系统控制指令进行准确、高效和稳定响应,并将线控执行机构的状态及时反馈给无人驾驶系统。
20、(2)本发明能够兼容有人和无人驾驶以及组网车辆线控运行状态数据分析功能。
21、(3)本发明通过故障诊断解析法,实现了底盘故障诊断功能,并实时上报到无人驾驶系统。
22、(4)本发明加入参数配置功能,实现了灵活适配不同厂家不同车辆,大大缩短了线控开发周期。
23、(5)本发明具备自诊断功能,通过监测实际执行结果和预期执行结果差异,分析执行链路上的关键节点,锁定执行异常节点和原因,及时定位异常并上报,极大缩短了常见控制问题的处理时间。
24、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
技术特征:
1.一种用于无人驾驶矿卡的线控集成控制单元,用于无人驾驶系统中车辆的线控集成控制终端,其特征在于,包括主控芯片、can通信芯片、232通信芯片、电源管理芯片、网络通信芯片、线控集成控制模块、底盘线控诊断模块、自诊断模块、can通信模块、网口通信模块、参数配置模块、ota在线升级模块和电源模块;主控芯片、can通信芯片、232通信芯片、电源管理芯片和网络通信芯接口设备实现互联;接口设备包括模拟量采集与输出接口、开关量输入输出接口、232串口通信接口,网口和can通信接口。
2.根据权利要求1所述的线控集成控制单元,其特征在于,线控集成控制单元通过can总线与无人驾驶矿卡的无人驾驶系统的主控单元进行通讯和数据传输;用于收集车辆底盘控制和车辆信息,并对控制过程中的异常原因进行反馈。
3.根据权利要求1所述的线控集成控制单元,其特征在于,无人驾驶矿卡的无人驾驶系统通过can总线与线控底盘连接。
4.根据权利要求1所述的线控集成控制单元,其特征在于,线控集成控制模块,通过can1总线和车辆底盘各部件进行通信和数据传输;通过can2总线和转向系统进行通信和数据传输;通过模拟量采集与输出接口对无人驾驶矿卡的前轮转向角度、货斗倾角、油门开度和人工及自动切换按键的监测;通过无人驾驶系统远程监测平台和网关控制器实现参数配置和ota功能;无人驾驶系统读取线控集成控制单元的各线控子系统反馈的数据,解析和分级各线控子系统反馈的数据,将故障信息反馈到无人驾驶系统主控制单元,实现车辆线控状态诊断和上报。
5.根据权利要求1所述的线控集成控制单元,其特征在于,自诊断模块用于对执行异常的动作进行节点分析,快速找到异常原因并上报到驾驶室中的人机交互屏幕和无人驾驶系统远程监测平台;通过监测数据链路上的关键节点,当发现实际执行动作响应与预期不符时,诊断线控执行部件异常并上报。
6.根据权利要求1所述的线控集成控制单元,其特征在于,底盘线控诊断模块用于实时监测底盘故障信息,实时处理反馈的故障数据,得到故障码和故障等级,反馈给控制器,作为无人驾驶系统决策的重要依据。
7.根据权利要求1所述的线控集成控制单元,其特征在于,参数配置模块用于获取无人驾驶系统远程监测平台下发的配置参数数据,根据车型通过无人驾驶系统远程监测平台配置并下发参数到线控集成控制单元,实现对不同车型的灵活适配,实现对不同车型的控制;同时线控集成控制单元将配置参数保存到内部存储空间,后续启动时即可直接读取。
8.一种用于无人驾驶矿卡的控制方法,使用权利要求1-7任一项所述的用于无人驾驶矿卡的线控集成控制单元,其特征在于,具体步骤如下:
技术总结
本发明公开了一种用于无人驾驶矿卡的线控集成控制单元及控制方法,属于无人驾驶矿卡控制技术领域,用以解决将实现矿用车辆线控化和智能化,为矿卡无人驾驶系统提供安全可靠的线控集成装置并缩短新车型线控系统开发周期。本发明的线控集成控制单元,包括主控芯片、CAN通信芯片、232通信芯片、电源管理芯片、网络通信芯片、线控集成控制模块、底盘线控诊断模块、自诊断模块、CAN通信模块、网口通信模块、自参数配置模块、OTA在线升级模块和电源模块。
技术研发人员:郭恒宇,段星集,王腾飞,孙欢欢,谢启源,张疆
受保护的技术使用者:北京踏歌智行科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!