车辆行驶控制方法、车载设备及存储介质与流程
本申请涉及自动驾驶,特别是涉及一种车辆行驶控制方法、车载设备及存储介质。
背景技术:
1、自动驾驶车辆的自动泊车系统可以控制车辆自动泊入目标车位,或者将车辆从车位内自动泊出。目前,自动泊车系统的人机交互过程以及控制器算法都很复杂,不仅导致生产成本高,甚至影响泊车安全。
技术实现思路
1、本申请提供了一种车辆行驶控制方法、车载设备及存储介质,以解决上述问题。
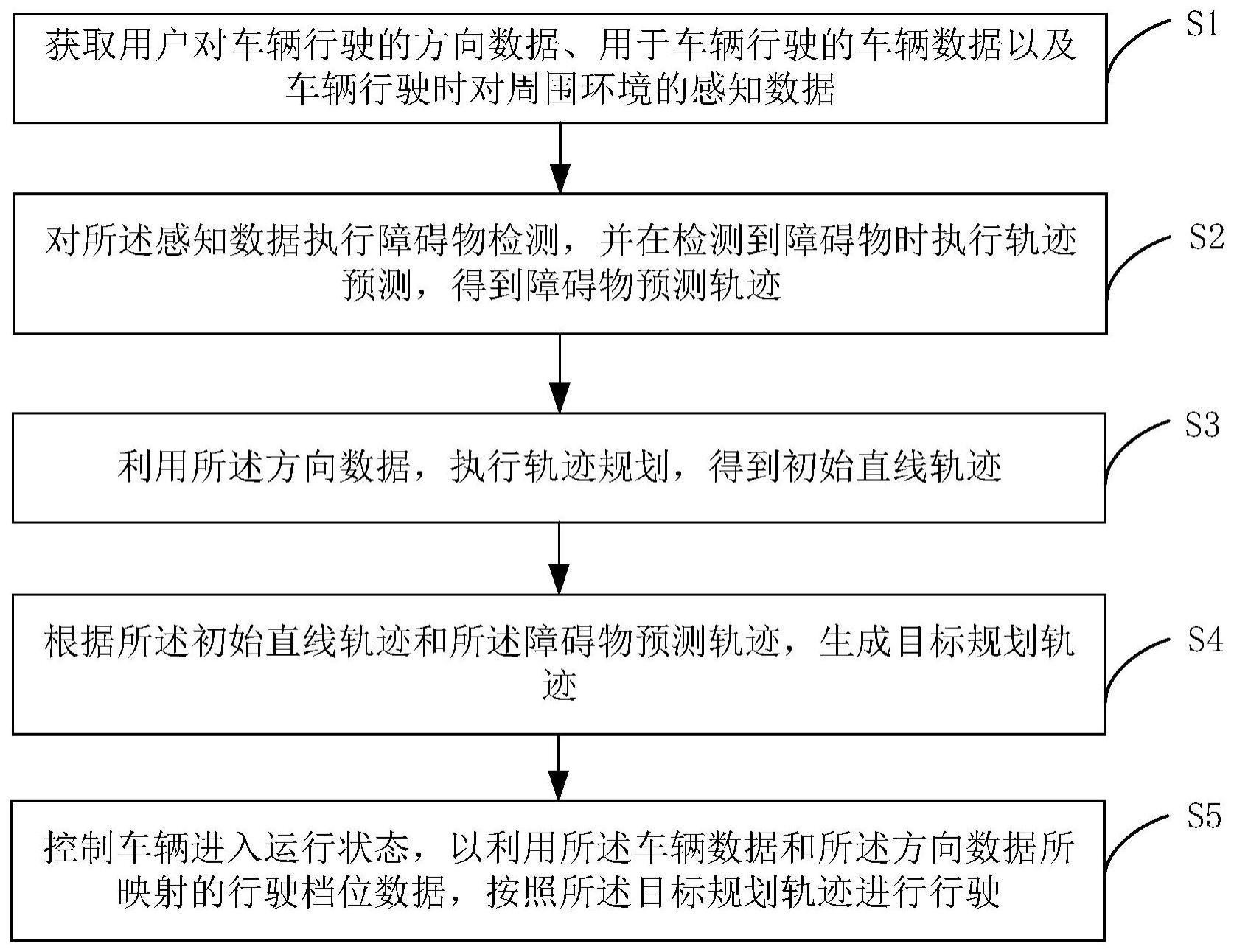
2、本申请第一方面提供了一种车辆行驶控制方法,包括:获取用户对车辆行驶的方向数据、用于车辆行驶的车辆数据以及车辆行驶时对周围环境的感知数据;对所述感知数据执行障碍物检测,并在检测到障碍物时执行轨迹预测,得到障碍物预测轨迹;利用所述方向数据,执行轨迹规划,得到初始直线轨迹;根据所述初始直线轨迹和所述障碍物预测轨迹,生成目标规划轨迹;控制车辆进入运行状态,以利用所述车辆数据和所述方向数据所映射的行驶档位数据,按照所述目标规划轨迹进行行驶。
3、在一些实施例中,所述方向数据包括用户对车辆行驶的单次操作对应的单次方向数据,则按照所述目标规划轨迹进行行驶的距离为单次行驶距离;所述方法还包括:获取所述单次行驶距离;响应于所述单次行驶距离超过阈值,控制车辆进入表示车辆被刹停的暂停状态。
4、在一些实施例中,所述方向数据包括用户对车辆行驶的连续多次操作对应的多次方向数据,则按照所述目标规划轨迹进行行驶的距离为多次行驶距离;所述方法还包括:获取所述多次行驶距离;响应于所述多次行驶距离达到允许的多次最大行驶距离,控制车辆进入关闭状态。
5、在一些实施例中,所述方法还包括:响应于按照所述目标规划轨迹进行行驶时偏离所述目标规划轨迹预设距离,控制车辆进入关闭状态。
6、在一些实施例中,根据所述初始直线轨迹和所述障碍物预测轨迹,生成目标规划轨迹,包括:响应于所述初始直线轨迹与所述障碍物预测轨迹相交,将所述初始直线轨迹生成为所述目标规划轨迹。
7、在一些实施例中,所述对所述感知数据执行障碍物检测,包括:从所述感知数据中获取障碍物移动速度;所述车辆数据包括车辆速度;确定所述初始直线轨迹与所述障碍物预测轨迹相交,包括:根据所述障碍物移动速度和所述车辆速度,获取车辆在预设时间内沿着所述初始直线轨迹的车辆终点,以及障碍物在所述预设时间内沿着所述障碍物预测轨迹的障碍物终点;响应于车辆终点与障碍物终点满足预设条件,确定所述初始直线轨迹与所述障碍物预测轨迹相交。
8、在一些实施例中,所述按照所述目标规划轨迹进行行驶,进一步包括:利用预设车辆速度,按照所述初始直线轨迹进行行驶,其中所述预设车辆速度大于或小于所述车辆速度。
9、在一些实施例中,所述控制车辆进入运行状态,进一步包括:控制车辆输出警示指令。
10、本申请第二方面提供了一种车载设备,包括相互耦接的存储器和处理器,所述处理器用于执行所述存储器中存储的程序指令,以实现上述第一方面中的车辆行驶控制方法。
11、本申请第三方面提供了一种非易失性计算机可读存储介质,所述计算机可读存储介质用于存储程序指令,所述程序指令在被处理器执行时,用于实现上述第一方面中的车辆行驶控制方法。
12、上述方案,通过对感知数据进行障碍物检测,并在检测到障碍物时执行轨迹预测,以得到障碍物预测轨迹;利用方向数据执行轨迹规划,以得到初始直线轨迹;根据初始直线轨迹和障碍物预测轨迹,生成目标规划轨迹;控制车辆进入运行状态,以利用车辆数据和方向数据所映射的行驶档位数据,按照目标规划轨迹进行行驶;本申请中的方案,通过对障碍物预测轨迹与车辆的初始直线轨迹相结合,生成目标规划轨迹,并利用车辆数据和方向数据所映射的行驶档位数据,按照目标规划轨迹进行行驶,有效提高车辆的行驶安全。
13、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本申请。
技术特征:
1.一种车辆行驶控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述方向数据包括用户对车辆行驶的单次操作对应的单次方向数据,则按照所述目标规划轨迹进行行驶的距离为单次行驶距离;
3.根据权利要求1所述的方法,其特征在于,所述方向数据包括用户对车辆行驶的连续多次操作对应的多次方向数据,则按照所述目标规划轨迹进行行驶的距离为多次行驶距离;
4.根据权利要求1所述的方法,其特征在于,所述方法还包括:
5.根据权利要求1-4中任一项所述的方法,其特征在于,根据所述初始直线轨迹和所述障碍物预测轨迹,生成目标规划轨迹,包括:
6.根据权利要求5所述的方法,其特征在于,所述对所述感知数据执行障碍物检测,包括:
7.根据权利要求6所述的方法,其特征在于,所述按照所述目标规划轨迹进行行驶,进一步包括:
8.根据权利要求1所述的方法,其特征在于,所述控制车辆进入运行状态,进一步包括:
9.一种车载设备,其特征在于,包括相互耦接的存储器和处理器,所述处理器用于执行所述存储器中存储的程序指令,以实现如权利要求1-8中任一项所述的车辆行驶控制方法。
10.一种非易失性计算机可读存储介质,其特征在于,所述计算机可读存储介质用于存储程序指令,所述程序指令在被处理器执行时,用于实现如权利要求1-8中任一项所述的车辆行驶控制方法。
技术总结
本申请提供一种车辆行驶控制方法、车载设备及存储介质,车辆行驶控制方法包括:对感知数据执行障碍物检测,并在检测到障碍物时执行轨迹预测,得到障碍物预测轨迹;利用方向数据,执行轨迹规划,得到初始直线轨迹;根据初始直线轨迹和障碍物预测轨迹,生成目标规划轨迹;控制车辆进入运行状态,以利用车辆数据和方向数据所映射的行驶档位数据,按照目标规划轨迹进行行驶;本申请中的方案,通过对障碍物预测轨迹与车辆的初始直线轨迹相结合,生成目标规划轨迹,并利用车辆数据和方向数据所映射的行驶档位数据,按照目标规划轨迹进行行驶,有效提高车辆的行驶安全。
技术研发人员:张小龙
受保护的技术使用者:浙江零跑科技股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!