用于清洁基底的清洁机器人的制作方法
本发明涉及一种用于清洁基底(untergrund)的清洁机器人,该清洁机器人具有壳体和用于使清洁机器人从倒下的位置翻转到其驱动器件上的翻转装置。
背景技术:
1、ep 2387486 b1描述了一种移动式机器人车辆,在其后轴处装配有可平行于机器人车辆的侧壁枢转的杠杆。当机器人车辆必须越过陡的障碍物或者大的高度落差时,所述杠杆用作支撑设备。此外,需要所述杠杆以便使机器人车辆立到其履带驱动装置上,当机器人车辆躺在其上侧上时。
2、us 8849451 b2示出了在跳跃机器人中几乎与此相同的结构。在后轮的轴上,同样安装有可平行于机器人的侧壁枢转的杠杆。该杠杆用作跳跃驱动装置。机器人可以利用该杠杆在确定的初始角度中取向。此外,当机器人位于空中时,可以利用该杠杆产生扭矩,以便控制机器人的位置。
3、在cn 214 238 266u中公开了一种搬运机器人(entnahmeroboter),在该搬运机器人的壳体侧壁处布置有铰接式臂,以便在机器人跌倒之后使机器人立起。通过该臂,跌倒的机器人再次站立在其轮子上。
技术实现思路
1、本发明的目的是如下地改进开头时提到类型的清洁机器人,使得该清洁机器人可以立刻从其倒下的位置翻转到其驱动器件上。
2、本发明利用这种类型的清洁机器人实现所提出的目的,在其中根据本发明翻转装置布置在壳体的上侧处。如果清洁机器人倒下到上侧上,清洁机器人可以利用该翻转装置再次翻转到其驱动器件上。相反地,如果清洁机器人保持躺在侧壁上或端侧上,则翻转装置在第一步骤中已经可以使清洁机器人摆回到其驱动器件上,或者在中间步骤中翻转到上侧上并且从该处旋转到驱动器件上。因此,清洁机器人在短时间之内再次准备就绪。清洁机器人例如可能倒下,由于该清洁机器人在运行中陷入倾斜位置中,或者由于该清洁机器人从边缘坠落并且未着陆到其驱动器件上。在被使用于清洁车辆内部空间的、具有小于200cm2的基面的清洁机器人中,从边缘坠落可以是在清洁运行中有意的操作。如此,清洁机器人在清洁过程开始时可以被放置在车辆座椅的座椅面上,并且在清洁车辆座椅之后如果以有意的方式从座椅面的边缘坠落,在车辆的脚部空间中继续清洁。
3、在一种优选的实施方式中,翻转装置可以具有可枢转的杠杆。该杠杆非常适合在短时间内将躺在上侧上、躺在侧壁或端侧中的一个上的清洁机器人翻转回到其驱动器件上。
4、可以利用弹簧元件和/或利用电动机使可枢转的杠杆枢转,以便翻转清洁机器人。如果杠杆非常快速地枢转,则杠杆可以产生足够的推动力以便将清洁机器人抛到其驱动器件上。为了该目的,优选地利用弹簧元件使杠杆枢转。
5、杠杆可以布置成在壳体的纵向方向上平行于壳体的侧壁。由此可以使清洁机器人经由其端侧或侧壁转动。
6、在其它优选的实施方式中,翻转装置可以配备有芯轴或缸-活塞单元。其同样非常适合用于在短时间内使躺在上侧上、躺在侧壁或端侧中的一个上的清洁机器人翻转回到其驱动器件上。
7、芯轴能够从壳体中可驶出并且至少部分地可驶入到壳体中。尤其是在具有小尺寸的清洁机器人中有利的是,芯轴是伸缩芯轴。由此芯轴可以延长到壳体尺寸的多倍以便产生足够的翻转力矩。
8、缸-活塞单元同样可以具有弹簧元件,为了翻转清洁机器人可以放松该弹簧元件。由此缸-活塞单元的弹簧元件同样可以将清洁机器人抛回其驱动器件上。
9、芯轴或缸-活塞单元可以与壳体的上侧包夹小于90°的角度。以这种方式实现了针对性的翻转运动,通过该翻转运动使清洁机器人立回到其驱动器件上。
10、出于相同的原因,芯轴或缸-活塞单元可以与壳体的侧壁包夹小于90°的角度。由于芯轴或缸-活塞单元相对于侧壁的该取向,清洁机器人以最低的惯性力矩绕其轴线翻转,从而以最少的能量执行转动。
11、尤其是在平坦的侧壁和端侧的情况中有意义的是,芯轴或缸-活塞单元可绕清洁机器人的竖向轴线枢转。要是清洁机器人保持躺在侧壁或端侧上,则芯轴或缸-活塞单元可以以这种方式枢转,从而可以立即实现成功地翻转到驱动器件上。
12、但在一种优选的实施方式中,壳体的侧壁可以凸形地弯拱。由此降低了清洁机器人保持躺在侧壁上并且随后必须转动回到其驱动器件上或在中间步骤中转动回到其上侧上的风险。因而机器人的翻转回进行得更快速。
13、为了保证清洁机器人可靠地着陆在驱动器件上或其上侧上并且不会保持躺在壳体的侧壁上,壳体的凸形地弯拱的侧壁可以至少部分地覆盖驱动器件。
14、为了防止清洁机器人保持躺在其端侧上,所述端侧同样可以凸形地弯拱。
15、驱动器件可以是履带式驱动装置的轮子和/或履带。
16、清洁机器人可以配备有用于探测清洁机器人的当前位置的传感器。适合于此的尤其是倾斜度传感器和加速度传感器。
技术特征:
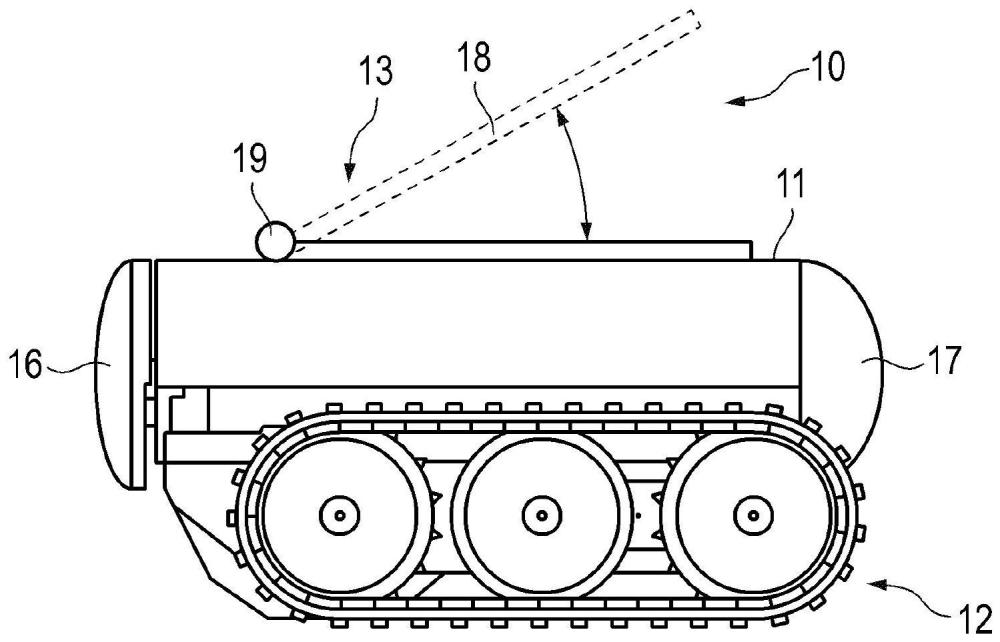
1.一种用于清洁基底的清洁机器人(10、40、60),所述清洁机器人具有壳体(11)和用于使所述清洁机器人(10、40、60)从倒下的位置翻转到其驱动器件(12)上的翻转装置(13、41、61),其特征在于,所述翻转装置(13、41、61)布置在所述壳体(11)的上侧处。
2.根据权利要求1所述的清洁机器人(10),其特征在于,所述翻转装置(13)具有可枢转的杠杆(18)。
3.根据权利要求2所述的清洁机器人(10),其特征在于,所述可枢转的杠杆(18)能够利用弹簧元件和/或利用电动机枢转。
4.根据权利要求2或3所述的清洁机器人(10),其特征在于,所述杠杆(18)布置成在所述壳体(11)的纵向方向上平行于所述壳体(11)的侧壁(14、15)。
5.根据权利要求1所述的清洁机器人(40、60),其特征在于,所述翻转装置(41、61)具有芯轴(42)或缸-活塞单元(62)。
6.根据权利要求5所述的清洁机器人(40),其特征在于,所述芯轴(42)能够从所述壳体(11)中驶出并且至少部分地驶入到所述壳体(11)中。
7.根据权利要求5所述的清洁机器人(60),其特征在于,所述缸-活塞单元(62)同样具有弹簧元件(63),为了翻转所述清洁机器人(60)能够放松所述弹簧元件。
8.根据权利要求5至7中任一项所述的清洁机器人(40、60),其特征在于,所述芯轴(42)或所述缸-活塞单元(62)与所述壳体(11)的上侧包夹小于90°的角度。
9.根据权利要求5至8中任一项所述的清洁机器人(40、60),其特征在于,所述芯轴(42)或所述缸-活塞单元(62)与所述壳体(11)的侧壁(14、15)包夹小于90°的角度。
10.根据前述权利要求中任一项所述的清洁机器人(40、60),其特征在于,所述壳体(11)的侧壁(14、15)凸形地弯拱。
11.根据权利要求10所述的清洁机器人(40、60),其特征在于,所述壳体(11)的凸形地弯拱的侧壁(14、15)至少部分地覆盖所述驱动器件(12)。
12.根据前述权利要求中任一项所述的清洁机器人(10、40、60),其特征在于,所述壳体(11)的端侧(16、17)凸形地弯拱。
技术总结
本发明涉及一种用于清洁基底的清洁机器人(10),清洁机器人具有壳体(11)和用于使清洁机器人(10)从倒下的位置翻转到其驱动器件(12)上的翻转装置(13),其中,翻转装置(13)布置在壳体(11)的上侧处。
技术研发人员:M·韦库姆
受保护的技术使用者:大众汽车股份公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!