一种基于数据驱动的不确定跟车系统鲁棒最优控制方法
本发明涉及智能驾驶,具体指一种基于数据驱动的不确定跟车系统鲁棒最优控制方法。
背景技术:
1、智能驾驶技术的不断发展,为人类出行带来更加便捷和舒适的体验,同时也成为推动人类社会发展进步的重要力量。近年来,自动驾驶技术成为了一个备受关注的领域。
2、自适应巡航控制是一种基于车辆感知技术的智能驾驶辅助系统。它可以通过车载雷达和摄像头等感知设备,识别前方行驶的车辆并实时测量距离和速度,从而帮助驾驶员实现自动控制车速和保持安全距离的功能。而传统的自适应巡航系统在路况不同的情形下不能保证鲁棒性,会降低驾驶人的驾驶体验。为了解决这一问题,科研人员提出了不确定跟车系统的数据驱动鲁棒最优控制。不确定跟车模式指的是车辆无法通过激光雷达感知到前方车辆的情况,这时候需要通过对前方车辆的运动轨迹进行分析来控制车辆的行驶。不确定跟车系统的数据驱动鲁棒最优控制技术基于现有的不确定状态下的跟车系统,通过对车辆前方的运动轨迹进行在线预测和优化控制,从而使得控制器有更好的鲁棒性和鲁棒最优性。该技术融合了传统控制理论、强化学习、机器学习等多种学科的方法。首先,需要通过机器学习和大量的数据进行训练集的构建。其次,在实时控制时,需要对车辆前方的运动轨迹进行预测。然后,将预测结果与控制器相结合,计算出最优的控制指令。最后,将控制指令应用于车辆控制系统中,实现对车辆的控制。这项技术的应用可以大大提高自适应巡航系统在不同路况下的鲁棒性和优化性能,减少了系统的不确定性,使得驾驶人可以更加舒适和安心地行驶。因此本发明基于理论研究,提出了一种基于数据驱动的不确定跟车系统鲁棒最优控制方法。
技术实现思路
1、为了克服现有研究的不足,本发明提供了一种基于数据驱动的不确定跟车系统鲁棒最优控制方法,针对车辆系统动态信息未知的情况,引入了循环神经网络和自适应动态规划方法实现鲁棒最优控制,且提出的控制策略能够很好的保证车辆的渐进稳定性和舒适性。
2、为了解决上述技术问题,本发明的技术方案为:
3、一种基于数据驱动的不确定跟车系统鲁棒最优控制方法,包括如下步骤:
4、s1、根据车辆的纵向动力学,建立其跟踪误差动力学模型,表达式如下:
5、
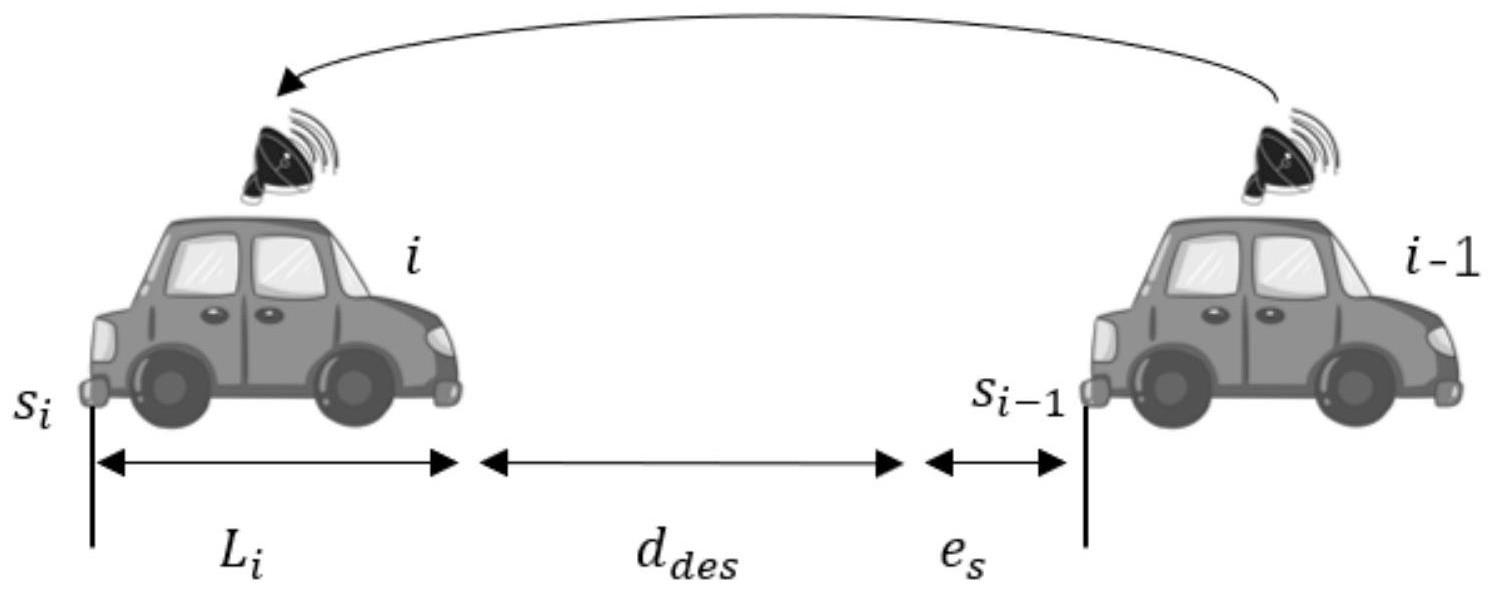
6、其中,i=1,2分别表示前车与主车;(τi是未知的发动机惯性参数);ui(t)是车辆用于设置所需加速度的发动机控制输入;是集总扰动;es(t)、ev(t)和ea(t)是相邻两辆车的相对位置误差、相对速度误差和相对加速度误差;
7、s2、根据跟踪误差动力学模型,建立误差动力学建立状态空间方程和误差动力学系统的标称模型,
8、所述误差动力学建立状态空间方程表达式如下:
9、
10、所述误差动力学系统的标称模型表达式如下:
11、
12、其中,x为状态向量,a、b、c分别为空间矩阵;
13、s3、根据最优控制原理,得到最优成本函数;
14、s4、定义哈密顿函数,进而得到最优输入表达式;
15、s5、引入循环神经网络获取车辆系统的动态信息,并利用自适应动态规划方法构建评价网络近似最优成本函数,获得最终的最优控制律。
16、作为优选,将最终的最优控制律导入车辆系统进行控制。
17、本发明具有以下的特点和有益效果:
18、采用上述技术方案,相比于其他控制方法,引入循环神经网络对不确定系统进行估计,并引入自适应动态方法近似控制器中的未知参数,设计出更加可靠且有效的控制策略,保证智能车辆驾驶过程的安全性和舒适性。
技术特征:
1.一种基于数据驱动的不确定跟车系统鲁棒最优控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于数据驱动的不确定跟车系统鲁棒最优控制方法,其特征在于,所述步骤s1具体实现方法为:
3.根据权利要求1所述的基于数据驱动的不确定跟车系统鲁棒最优控制方法,其特征在于,所述步骤s2具体实现方法为:
4.根据权利要求1所述的基于数据驱动的不确定跟车系统鲁棒最优控制方法,其特征在于,所述步骤s3中,最优成本函数建立方法为:
5.根据权利要求4所述的基于数据驱动的不确定跟车系统鲁棒最优控制方法,其特征在于,所述步骤s4的具体方法如下:
6.根据权利要求5所述的基于数据驱动的不确定跟车系统鲁棒最优控制方法,其特征在于,所述步骤s5包括如下子步骤:
7.根据权利要求6所述的基于数据驱动的不确定跟车系统鲁棒最优控制方法,其特征在于,所述步骤s5-1的具体方法为:
8.根据权利要求7所述的基于数据驱动的不确定跟车系统鲁棒最优控制方法,其特征在于,所述步骤s5-2中,评价网络如下:
9.根据权利要求8所述的基于数据驱动的不确定跟车系统鲁棒最优控制方法,其特征在于,所述步骤s5-3的具体方法如下:
技术总结
本发明涉及一种基于数据驱动的不确定跟车系统鲁棒最优控制方法,基于数据驱动的不确定跟车系统鲁棒最优控制方法,首先,针对存在匹配扰动和不确定参数的智能车辆,建立车辆的纵向动力学模型和跟踪误差动力学模型。接着,设计了一个自适应最优控制器来实现不确定系统的鲁棒控制。其中,引入循环神经网络来自适应地估计系统的动态特性,并采用自适应动态规划来近似控制律中未知的最优成本函数。本发明所提出的方法针对具有不确定性和未知匹配干扰的系统具有良好的性能,为实际应用中的自适应控制提供了新的思路和方法,同时也对不确定系统的控制问题提供了一种新的解决思路。
技术研发人员:翟春杰,詹一笑,金斌皓,尹克,陈慧勤,陈楚翘,颜成钢
受保护的技术使用者:杭州电子科技大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!