座椅联动台的调节控制方法及作业机械与流程
本发明涉及作业机械,尤其涉及一种座椅联动台的调节控制方法及作业机械。
背景技术:
1、在挖掘机、搅拌机及起重机等作业机械中,入座方便性和胳膊舒适性是一些驾驶室长度较小的作业机械需要考虑的两个主要问题。相关技术中,在作业机械的驾驶室内设置座椅联动台,座椅联动台包括座体和设于座体相对两侧的扶手箱,扶手箱连接有扶手,扶手箱可相对于座椅转动,将扶手箱掀起一定的角度,以调整扶手箱的位置,增大驾驶室的入口尺寸,方便驾驶员入座,满足入座方便性,此时,扶手与扶手箱同步进行位置调节。当扶手布置在扶手箱上,扶手占用了较大的空间,一些旋钮、按键等无法再布置在扶手箱上,造成空间浪费;并且,扶手与扶手箱固定连接,扶手不能随座椅前后移动,当座椅前后移动时,不能根据驾驶员的需求调整扶手,不能满足胳膊的舒适性。
技术实现思路
1、本发明提供一种座椅联动台的调节控制方法,用以解决现有技术中胳膊舒适度不高、入座不方便以及扶手箱空间浪费的缺陷,实现优化扶手箱的空间分布,提升胳膊的舒适度及入座方便性。
2、本发明提供一种座椅联动台的调节控制方法,所述座椅联动台包括座椅、可活动的连接于所述座椅的扶手以及设置在所述座椅的至少一侧的扶手箱;
3、所述座椅联动台的调节控制方法包括:
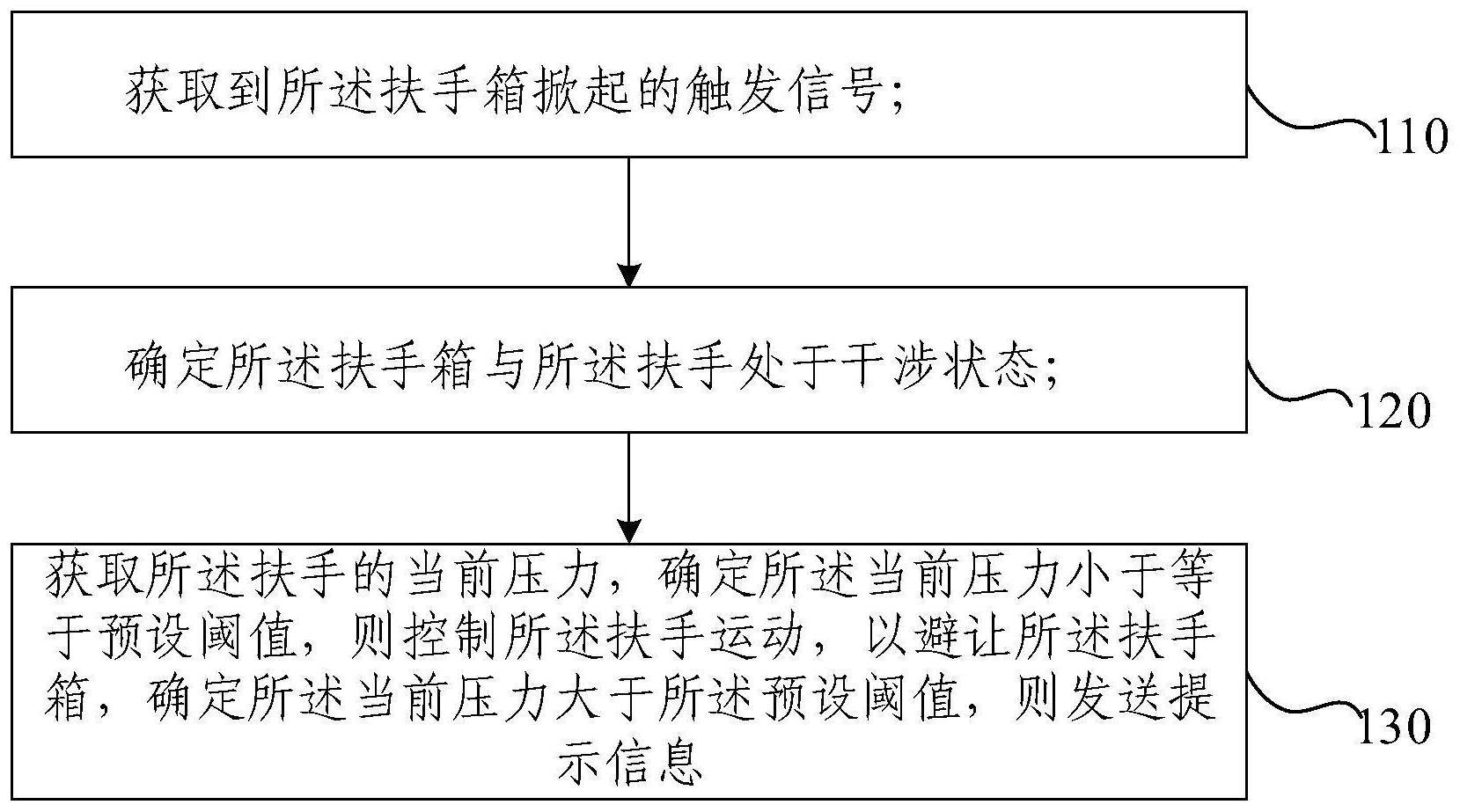
4、获取到所述扶手箱掀起的触发信号;
5、确定所述扶手箱与所述扶手处于干涉状态;
6、获取所述扶手的当前压力,确定所述当前压力小于等于预设阈值,则控制所述扶手运动,以避让所述扶手箱,确定所述当前压力大于所述预设阈值,则发送提示信息。
7、根据本发明提供一种的座椅联动台的调节控制方法,所述确定所述扶手箱与所述扶手处于干涉状态的步骤中,
8、获取所述座椅或所述扶手的第一预设位置与所述扶手箱的第二预设位置之间的测量距离;
9、确定所述测量距离小于等于距离阈值,则确定所述扶手箱与所述扶手处于干涉状态。
10、根据本发明提供一种的座椅联动台的调节控制方法,所述获取所述扶手箱的第一预设位置与所述扶手的第二预设位置之间的测量距离的步骤中,
11、基于所述第一预设位置为所述座椅或所述扶手的前端面,所述第二预设位置为所述扶手箱的前端面,通过所述座椅和所述扶手箱的前端设置的距离传感器,获取到所述测量距离。
12、根据本发明提供一种的座椅联动台的调节控制方法,所述获取到所述扶手箱掀起的触发信号的步骤中,
13、所述触发信号包括所述扶手箱连接的触发开关的开启或关闭信号、所述扶手箱连接的触发传感器的变换信号以及用于驱动所述扶手箱转动的驱动电机的启动信号中的至少一种。
14、根据本发明提供一种的座椅联动台的调节控制方法,所述触发开关包括行程开关、光电开关、电磁开关中的至少一种;和/或,所述触发传感器包括位移传感器、光电传感器、磁感应传感器中的至少一种。
15、根据本发明提供一种的座椅联动台的调节控制方法,所述获取所述扶手的当前压力的步骤中,
16、所述扶手设置有压力传感器、重力传感器与应变片中的至少一种,以通过所述压力传感器、所述重力传感器与所述应变片中的至少一种获取所述当前压力。
17、根据本发明提供一种的座椅联动台的调节控制方法,所述扶手与所述座椅通过轴体转动连接。
18、根据本发明提供一种的座椅联动台的调节控制方法,所述压力传感器、所述重力传感器与所述应变片中的至少一种连接于所述轴体或与所述轴体配合的轴孔的壁面。
19、根据本发明提供一种的座椅联动台的调节控制方法,所述确定所述当前压力小于等于预设阈值,则控制所述扶手运动,以避让所述扶手箱的步骤中,
20、控制所述扶手相对于所述扶手箱向上转动或移动,或,控制所述扶手相对于所述座椅向后移动,或,控制所述扶手相对于所述座椅向左侧或右侧转动。
21、本发明还提供一种作业机械,包括控制器及设置在驾驶室内的座椅联动台,所述控制器用于执行如上任意一项所述的座椅联动台的调节控制方法。
22、根据本发明提供的一种作业机械,所述扶手箱在所述扶手下方的空间设置有操作键、储物空间及储物容器中的至少一种。
23、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述座椅联动台的调节控制方法的步骤。
24、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述座椅联动台的调节控制方法的步骤。
25、本发明提供的座椅联动台的调节控制方法,基于扶手安装在座椅上,扶手箱掀起时,扶手可能会与扶手箱发生干涉,因此,在获取到扶手箱掀起的触发信号后,先确定扶手箱与扶手是否会发生干涉,若处于干涉状态,则判断扶手上是否有重物,若扶手上有重物,则发出提示信息,以提醒驾驶员抬起胳膊或取走重物,若扶手上没有重物,则控制扶手运动以避让扶手箱,保证扶手箱稳定掀起,还能保证驾驶员和扶手的安全性。
26、进一步的,通过座椅或扶手的第一预设位置检测以及扶手箱的第二预设位置检测,判断扶手与扶手箱是否会发生干涉,判断方式简单。其中,第一预设位置与第二预设位置,可以为,在前一次座椅和扶手箱调节完成后确定的位置,该信息可以直接获取,无需额外安装检测器件,座椅联动台的硬件结构变化小,降低改造成本。
27、进一步的,扶手避让扶手箱的运动方式可以为转动、移动等方式,扶手的避让方式多样。
28、更进一步的,触发信号的获取方式多样,使用于多种座椅联动台。
技术特征:
1.一种座椅联动台的调节控制方法,其特征在于,所述座椅联动台包括座椅、可活动的连接于所述座椅的扶手以及设置在所述座椅的至少一侧的扶手箱;
2.根据权利要求1所述的座椅联动台的调节控制方法,其特征在于,所述确定所述扶手箱与所述扶手处于干涉状态的步骤中,
3.根据权利要求2所述的座椅联动台的调节控制方法,其特征在于,所述获取所述扶手箱的第一预设位置与所述扶手的第二预设位置之间的测量距离的步骤中,
4.根据权利要求1所述的座椅联动台的调节控制方法,其特征在于,所述获取到所述扶手箱掀起的触发信号的步骤中,
5.根据权利要求4所述的座椅联动台的调节控制方法,其特征在于,所述触发开关包括行程开关、光电开关、电磁开关中的至少一种;和/或,所述触发传感器包括位移传感器、光电传感器、磁感应传感器中的至少一种。
6.根据权利要求1所述的座椅联动台的调节控制方法,其特征在于,所述获取所述扶手的当前压力的步骤中,
7.根据权利要求1所述的座椅联动台的调节控制方法,其特征在于,所述扶手与所述座椅通过轴体转动连接。
8.根据权利要求1至7中任意一项所述的座椅联动台的调节控制方法,其特征在于,所述确定所述当前压力小于等于预设阈值,则控制所述扶手运动,以避让所述扶手箱的步骤中,
9.一种作业机械,其特征在于,包括控制器及设置在驾驶室内的座椅联动台,所述控制器用于执行权利要求1至8中任意一项所述的座椅联动台的调节控制方法。
10.根据权利要求9所述的作业机械,其特征在于,所述扶手箱在所述扶手下方的空间设置有操作键、储物空间及储物容器中的至少一种。
技术总结
本发明涉及作业机械技术领域,提供一种座椅联动台的调节控制方法及作业机械。其中,所述座椅联动台包括座椅、可活动的连接于所述座椅的扶手以及设置在所述座椅的至少一侧的扶手箱;所述座椅联动台的调节控制方法包括:获取到所述扶手箱掀起的触发信号;确定所述扶手箱与所述扶手处于干涉状态;获取所述扶手的当前压力,确定所述当前压力小于等于预设阈值,则控制所述扶手运动,以避让所述扶手箱,确定所述当前压力大于所述预设阈值,则发送提示信息。本发明提供的座椅联动台的调节控制方法及作业机械,用以解决现有技术中胳膊舒适度不高、入座不方便以及扶手箱空间浪费的缺陷,实现优化扶手箱的空间分布,提升胳膊的舒适度及入座方便性。
技术研发人员:高梦祥,刘鑫,祁超
受保护的技术使用者:三一重机有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!