本发明属于自动驾驶,具体涉及一种车辆运动轨迹预测方法、装置、设备及介质。
背景技术:
1、在自动驾驶领域中,轨迹预测模块往往接收环境感知模块的输入,对周边交通参与者(以下称为actor)的未来轨迹提供预测,输入到下游的规划控制模块,作为规划控制模块的决策依据,使得其能规划出安全舒适的自车未来轨迹,而保证这种规划的安全就需要对周边actor未来趋势或轨迹的准确预测。
2、随着数据量和计算机算力的不断增长,使得基于深度学习的轨迹预测方法变得可行。深度学习方法以数据为驱动,同时考虑车辆周边地图感知信息和周报车辆历史轨迹的特征信息,使得模型能够较好的适应复杂路况,且克服了传统机器学习手工特征工程鲁棒性差的缺点,使得该类方法逐渐成为行业主流。
3、深度学习轨迹预测算法是通过模型拟合真实轨迹生成轨迹,但输入数据存在噪声或与训练数据特征差异较大时,不能保证深度学习模型输出的预测轨迹完全符合物理规律。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明提供一种车辆运动轨迹预测方法、装置、设备及介质,以解决上述技术问题。
2、本发明提供的一种车辆运动轨迹预测方法,所述方法包括:
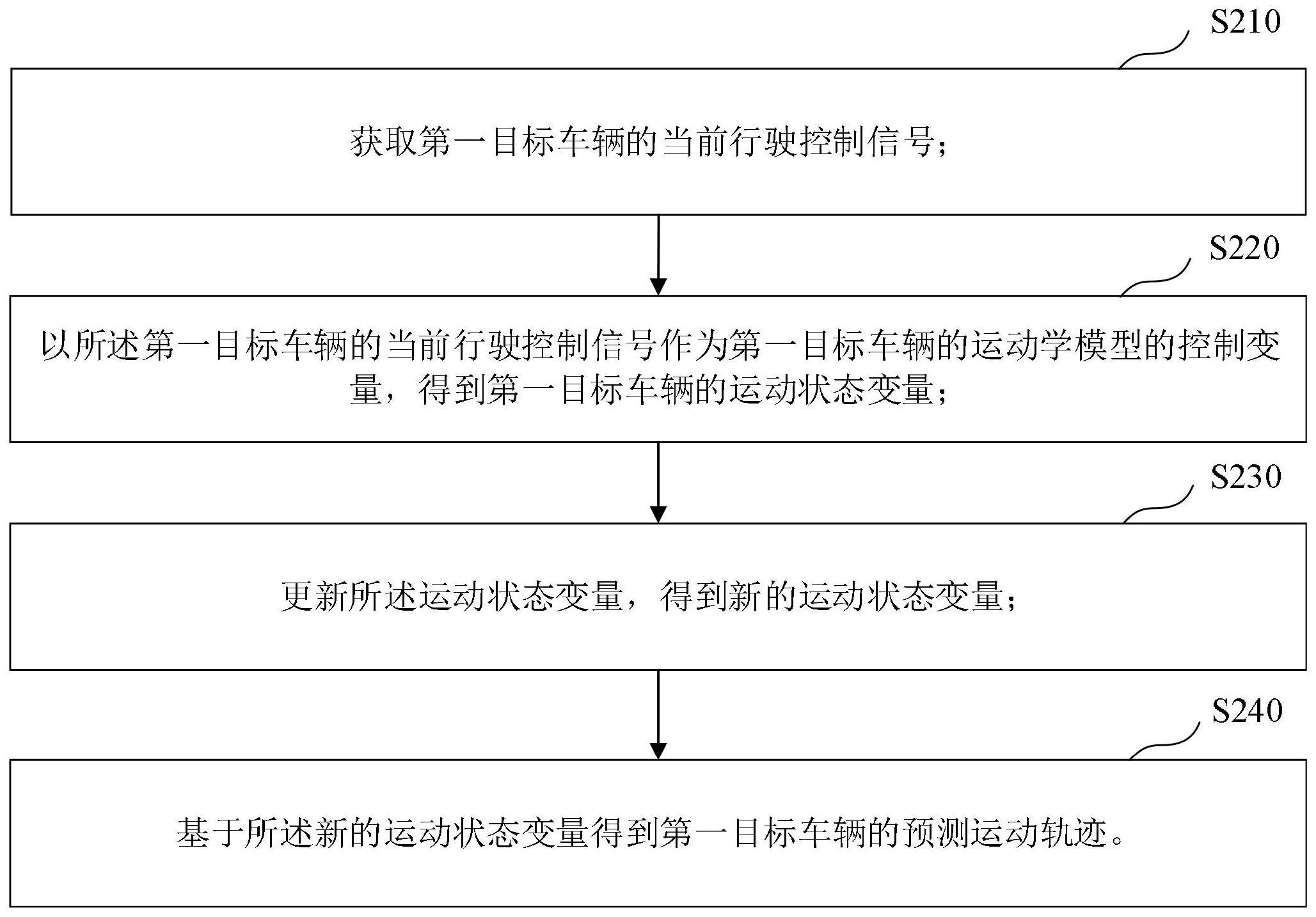
3、获取第一目标车辆的当前行驶控制信号;
4、以所述第一目标车辆的当前行驶控制信号作为第一目标车辆的运动学模型的控制变量,得到第一目标车辆的运动状态变量;
5、更新所述运动状态变量,得到新的运动状态变量;
6、基于所述新的运动状态变量得到第一目标车辆的预测运动轨迹。
7、于本发明一实施例中,所述第一目标车辆的运动学模型为二轮车运动学模型,所述以所述第一目标车辆的当前行驶控制信号作为第一目标车辆的运动学模型的控制变量,得到第一目标车辆的运动状态变量的步骤包括:
8、将所述第一目标车辆的当前行驶控制信号输入至所述二轮车运动学模型,得到第一目标车辆的运动状态变量;所述第一目标车辆的当前行驶控制信号包括:车辆的加速度和车辆的前轮转角;所述第一目标车辆的运动状态变量包括:车辆在坐标系的横坐标值、车辆在坐标系的纵坐标值、车辆的车头航向角和车辆的车速。
9、于本发明一实施例中,所述获取第一目标车辆的当前行驶控制信号的步骤包括:
10、获取第一目标车辆的当前行驶状态数据和与第一目标车辆具有关联关系的第一关联车辆的当前行驶状态数据;
11、将第一目标车辆的当前行驶状态数据和第一关联车辆的当前行驶状态数据输入至训练好的控制信号预测模型中,以控制信号预测模型的输出作为所述第一目标车辆的当前行驶控制信号;其中,所述控制信号预测模型是通过以第二目标车辆的历史行驶状态数据、与第二目标车辆具有关联关系的第二关联车辆的历史行驶状态数据作为输入,以第二目标车辆的历史行驶控制信号作为输出构建的基于深度学习的模型。
12、于本发明一实施例中,所述将第一目标车辆的当前行驶状态数据和第一关联车辆的当前行驶状态数据输入至训练好的控制信号预测模型中,以控制信号预测模型的输出作为所述第一目标车辆的当前行驶控制信号的步骤包括:
13、通过控制信号预测模型的编码模块对所述第一目标车辆的当前行驶状态数据和第一关联车辆的当前行驶状态数据进行编码,得到第一目标车辆与关联车辆的关联特征;
14、通过控制信号预测模型的解码模块对所述关联特征进行解码,得到第一目标车辆的当前行驶控制信号。
15、于本发明一实施例中,在所述解码模块对所述关联特征进行解码后,所述方法还包括:
16、对所述解码模块对所述关联特征进行解码输出的解码信息后,通过设定的约束条件对所述解码信息进行约束,并将添加约束后的解码信息与放缩系数相乘,得到当前行驶控制信号。
17、于本发明一实施例中,所述第一目标车辆的当前行驶控制信号是通过车载传感器采集的。
18、于本发明一实施例中,所述更新所述运动状态变量,得到新的运动状态变量的步骤包括:
19、利用数值积分法对所述运动状态变量进行离散化处理,得到新的运动状态变量;所述数值积分法包括:二阶龙格库塔法、四阶龙格库塔法中的一种;
20、当利用二阶龙格库塔法对所述运动状态变量进行离散化处理时,新的运动状态变量yn+1为:
21、
22、当利用四阶龙格库塔法对所述运动状态变量进行离散化处理时,新的运动状态变量yn+1为:
23、
24、
25、
26、其中,f(tn,yn)表示导函数、tn表示当前时刻、yn表示当前时刻的运动状态变量,yn+1表示新的运动状态变量。
27、本发明提供的一种车辆运动轨迹预测装置,所述装置包括:
28、数据获取模块,用于获取第一目标车辆的当前行驶控制信号;
29、变量生成模块,用于以所述第一目标车辆的当前行驶控制信号作为第一目标车辆的运动学模型的控制变量,得到第一目标车辆的运动状态变量;
30、状态更新模块,用于利用数值积分法更新所述运动状态变量,得到新的运动状态变量;
31、轨迹预测模块,用于基于所述新的运动状态变量得到第一目标车辆的预测运动轨迹。
32、本发明提供的一种电子设备,所述电子设备包括:
33、一个或多个处理器;
34、存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述电子设备实现上述的车辆运动轨迹预测方法的步骤。
35、本发明提供的一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序被计算机的处理器执行时,使计算机执行上述车辆运动轨迹预测方法的步骤。
36、本发明的有益效果:本发明中的一种车辆运动轨迹预测方法,包括:获取目标车辆的当前行驶控制信号;以所述目标车辆的当前行驶控制信号作为目标车辆的运动学模型的控制变量,得到目标车辆的运动状态变量;更新所述运动状态变量,得到新的运动状态变量;基于所述新的运动状态变量得到目标车辆的预测运动轨迹。本发明先获得车辆的控制信号,将控制信号作为运动学模型的控制变量,然后输出运动状态变量,再通过数值积分法对运动变量进行更新得到每一个预测点的运动状态变量,最终通过所有的预测点生成运动轨迹,由于在预测过程中结合了车辆的运动学模型,解决了工程化中纯深度学习模型输出轨迹缺乏运动学约束的问题,为自动驾驶系统提供可靠的目标轨迹预测信息,提升车辆行驶的安全性,使得模型在各类场景具有更强的泛化性和鲁棒性,预测轨迹更符合运动学。
37、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:1.一种车辆运动轨迹预测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的车辆运动轨迹预测方法,其特征在于,所述第一目标车辆的运动学模型为二轮车运动学模型,所述以所述第一目标车辆的当前行驶控制信号作为第一目标车辆的运动学模型的控制变量,得到第一目标车辆的运动状态变量的步骤包括:
3.根据权利要求1所述的车辆运动轨迹预测方法,其特征在于,所述获取第一目标车辆的当前行驶控制信号的步骤包括:
4.根据权利要求3所述的车辆运动轨迹预测方法,其特征在于,所述将第一目标车辆的当前行驶状态数据和第一关联车辆的当前行驶状态数据输入至训练好的控制信号预测模型中,以控制信号预测模型的输出作为所述第一目标车辆的当前行驶控制信号的步骤包括:
5.根据权利要求4所述的车辆运动轨迹预测方法,其特征在于,在所述解码模块对所述关联特征进行解码后,所述方法还包括:
6.根据权利要求1所述的车辆运动轨迹预测方法,其特征在于,所述第一目标车辆的当前行驶控制信号是通过车载传感器采集的。
7.根据权利要求1或2所述的车辆运动轨迹预测方法,其特征在于,所述更新所述运动状态变量,得到新的运动状态变量的步骤包括:
8.一种车辆运动轨迹预测装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,当所述计算机程序被计算机的处理器执行时,使计算机执行权利要求1至7中任一项所述的车辆运动轨迹预测方法的步骤。
技术总结本发明公开了一种车辆运动轨迹预测方法,包括:获取目标车辆的当前行驶控制信号;以所述目标车辆的当前行驶控制信号作为目标车辆的运动学模型的控制变量,得到目标车辆的运动状态变量;更新所述运动状态变量,得到新的运动状态变量;基于所述新的运动状态变量得到目标车辆的预测运动轨迹。本发明由于在预测过程中结合了车辆的运动学模型,解决了工程化中纯深度学习模型输出轨迹缺乏运动学约束的问题,为自动驾驶系统提供可靠的目标轨迹预测信息,提升车辆行驶的安全性,使得模型在各类场景具有更强的泛化性和鲁棒性,预测轨迹更符合运动学。
技术研发人员:张忠旭,林仲涛,卞一程,郑文,严旭
受保护的技术使用者:重庆长安汽车股份有限公司
技术研发日:技术公布日:2024/1/16