本发明涉及车辆控制,尤其涉及一种车道偏离预警方法、装置、设备及介质。
背景技术:
1、随着智能驾驶车辆的不断发展,越来越多的车辆上搭载车道保持辅助系统。当检测到车辆偏离原车道时,系统能发出报警提示并主动控制车辆回到本车道,从而减少交通事故的发生。因此,合理的车道偏离预警算法,对车道保持辅助系统具有重要意义。
2、相关方案中,采用跨线时间算法进行车道偏离预警。该算法通过计算自车保持当前行驶状态下,车轮触碰到车道线外边界的时间,并基于计算得到的时间确定是否发出报警或纠偏信号。
3、然而,上述方案需要区分不同的车辆运行工况,并针对不同工况采取相应的措施。具体的,需要考虑直线路段和曲线路段以及直线行驶轨迹和曲线行驶轨迹,前两者和后两者分别组合有四种算法模型,每种模型算法均不相同,因而算法较为复杂和繁琐,导致预警效率低下。
技术实现思路
1、本发明提供了一种车道偏离预警方法、装置、设备及介质,基于模糊控制方式对车辆进行车道偏离预警,无需区分不同工况,能够在确保预警准确性的同时,降低预警算法的复杂性,从而提高预警效率。
2、根据本发明的一方面,提供了一种车道偏离预警方法,所述方法包括:
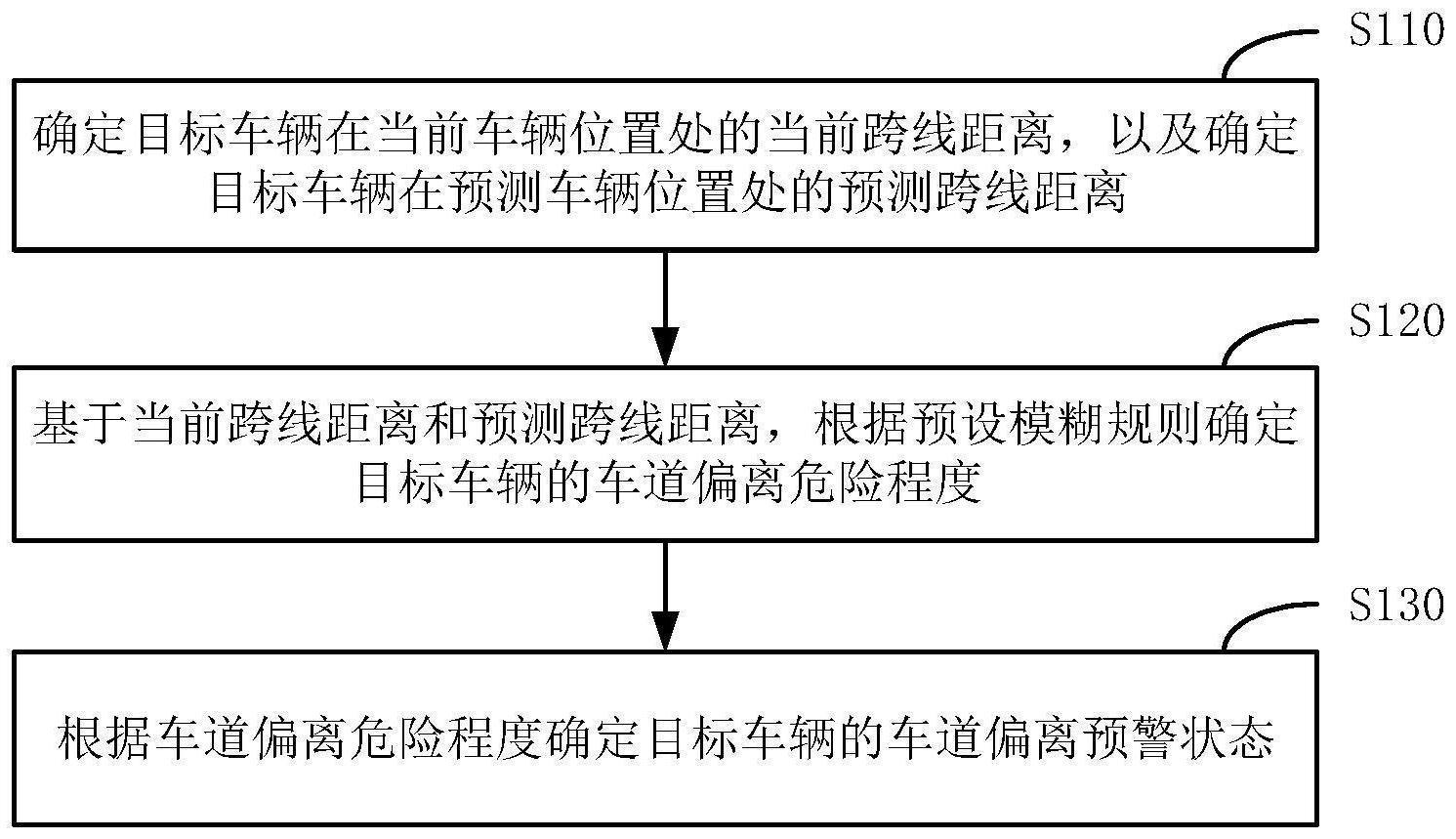
3、确定目标车辆在当前车辆位置处的当前跨线距离,以及确定所述目标车辆在预测车辆位置处的预测跨线距离;其中,所述跨线距离用于表征目标车辆的参考前轮与参考车道线之间的距离,所述参考车道线为目标车辆所在的车道线中位于所述参考前轮同侧的车道线,所述预测车辆位置为当目标车辆按照当前运行状态行驶时预测得到的车辆位置;
4、基于所述当前跨线距离和所述预测跨线距离,根据预设模糊规则确定所述目标车辆的车道偏离危险程度;其中,所述预设模糊规则基于所述当前跨线距离和所述预测跨线距离的变化趋势进行确定;
5、根据所述车道偏离危险程度确定所述目标车辆的车道偏离预警状态。
6、根据本发明的另一方面,提供了一种车道偏离预警装置,包括:
7、跨线距离确定模块,用于确定目标车辆在当前车辆位置处的当前跨线距离,以及确定所述目标车辆在预测车辆位置处的预测跨线距离;其中,所述跨线距离用于表征目标车辆的参考前轮与参考车道线之间的距离,所述参考车道线为目标车辆所在的车道线中位于所述参考前轮同侧的车道线,所述预测车辆位置为当目标车辆按照当前运行状态行驶时预测得到的车辆位置;
8、偏离危险程度确定模块,用于基于所述当前跨线距离和所述预测跨线距离,根据预设模糊规则确定所述目标车辆的车道偏离危险程度;其中,所述预设模糊规则基于所述当前跨线距离和所述预测跨线距离的变化趋势进行确定;
9、预警状态确定模块,用于根据所述车道偏离危险程度确定所述目标车辆的车道偏离预警状态。
10、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
11、至少一个处理器;以及
12、与所述至少一个处理器通信连接的存储器;其中,
13、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的车道偏离预警方法。
14、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的车道偏离预警方法。
15、本发明实施例的技术方案,确定目标车辆在当前车辆位置处的当前跨线距离,以及确定目标车辆在预测车辆位置处的预测跨线距离;其中,跨线距离用于表征目标车辆的参考前轮与参考车道线之间的距离,参考车道线为目标车辆所在的车道线中位于参考前轮同侧的车道线,预测车辆位置为当目标车辆按照当前运行状态行驶时预测得到的车辆位置;基于当前跨线距离和预测跨线距离,根据预设模糊规则确定目标车辆的车道偏离危险程度;其中,预设模糊规则基于当前跨线距离和预测跨线距离的变化趋势进行确定;根据车道偏离危险程度确定目标车辆的车道偏离预警状态。本技术方案,基于模糊控制方式对车辆进行车道偏离预警,无需区分不同工况,能够在确保预警准确性的同时,降低预警算法的复杂性,从而提高预警效率。
16、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:1.一种车道偏离预警方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,确定目标车辆在当前车辆位置处的当前跨线距离,包括:
3.根据权利要求1所述的方法,其特征在于,确定所述目标车辆在预测车辆位置处的预测跨线距离,包括:
4.根据权利要求3所述的方法,其特征在于,所述目标车辆从所述当前车辆位置经过预设时长后到达所述预测车辆位置,所述当前运行状态信息包括当前车速和当前横摆角速度;
5.根据权利要求1所述的方法,其特征在于,基于所述当前跨线距离和所述预测跨线距离,根据预设模糊规则确定所述目标车辆的车道偏离危险程度,包括:
6.根据权利要求1-5任一所述的方法,其特征在于,根据所述车道偏离危险程度确定所述目标车辆的车道偏离预警状态,包括:
7.根据权利要求1-5任一所述的方法,其特征在于,根据所述车道偏离危险程度确定所述目标车辆的车道偏离预警状态,包括:
8.一种车道偏离预警装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的车道偏离预警方法。
技术总结本发明实施例公开了一种车道偏离预警方法、装置、设备及介质。其中,该方法包括:确定目标车辆在当前车辆位置处的当前跨线距离,以及确定目标车辆在预测车辆位置处的预测跨线距离;其中,跨线距离用于表征目标车辆的参考前轮与参考车道线之间的距离,参考车道线为目标车辆所在的车道线中位于参考前轮同侧的车道线;基于当前跨线距离和预测跨线距离,根据预设模糊规则确定目标车辆的车道偏离危险程度;根据车道偏离危险程度确定目标车辆的车道偏离预警状态。本技术方案,基于模糊控制方式对车辆进行车道偏离预警,无需区分不同工况,能够在确保预警准确性的同时,降低预警算法的复杂性,从而提高预警效率。
技术研发人员:付仁涛,蒋子明,刘柯旺
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:技术公布日:2024/1/16