无人驾驶车辆弯道控制方法、装置、设备及可读存储介质与流程
本发明涉及车辆控制,尤其涉及一种无人驾驶车辆弯道控制方法、装置、设备及可读存储介质。
背景技术:
1、对于井下的矿山场景,矿用卡车在井下承担着运输矿石的任务,然而由于地下路况复杂:坡道、弯道、急弯较多、铺装和非铺装路面等,目前存在着无人驾驶的矿用卡车在通过弯道时的安全性较低的问题。
技术实现思路
1、本发明的主要目的在于提供一种无人驾驶车辆弯道控制方法、装置、设备及可读存储介质,旨在解决对于井下的矿山场景,目前无人驾驶的矿用卡车在通过弯道时的安全性较低的技术问题。
2、第一方面,本发明提供一种无人驾驶车辆弯道控制方法,所述无人驾驶车辆弯道控制方法包括:
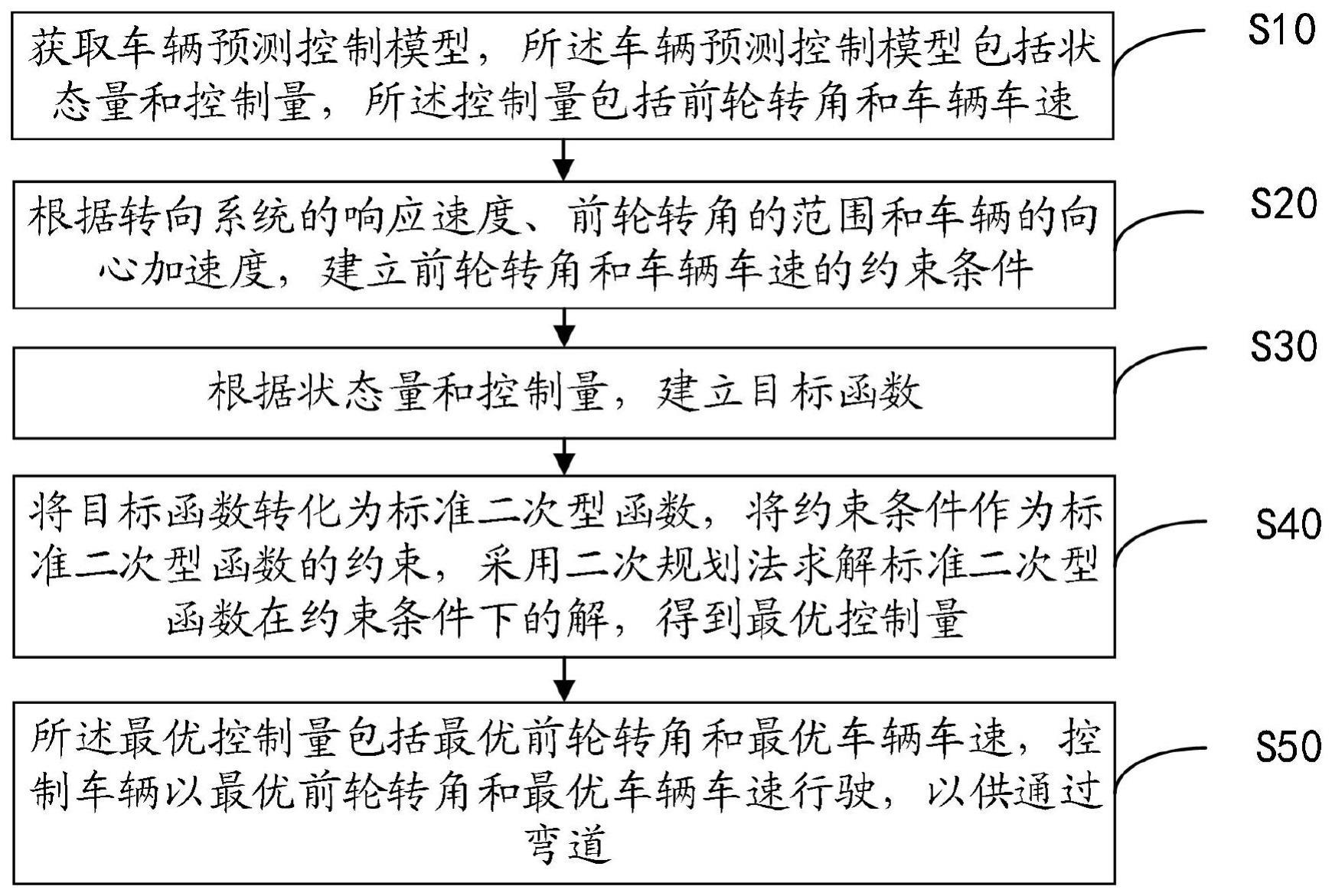
3、获取车辆预测控制模型,所述车辆预测控制模型包括状态量和控制量,所述控制量包括前轮转角和车辆车速;
4、根据转向系统的响应速度、前轮转角的范围和车辆的向心加速度,建立前轮转角和车辆车速的约束条件;
5、根据状态量和控制量,建立目标函数;
6、将目标函数转化为标准二次型函数,将约束条件作为标准二次型函数的约束,采用二次规划法求解标准二次型函数在约束条件下的解,得到最优控制量;
7、所述最优控制量包括最优前轮转角和最优车辆车速,控制车辆以最优前轮转角和最优车辆车速行驶,以供通过弯道。
8、可选的,在所述获取车辆预测控制模型之前,包括:
9、根据车辆运动学模型,建立车辆运动状态的非线性方程;
10、将车辆位置和车辆航向角作为状态量,前轮转角和车辆车速作为控制量,将非线性方程在目标参考点处进行泰勒展开得到线性化模型;
11、采用前向欧拉法对线性化模型进行离散化,得到离散方程;
12、根据离散方程,建立序列化的车辆预测控制模型。
13、可选的,所述根据转向系统的响应速度、前轮转角的范围和车辆的向心加速度,建立前轮转角和车辆车速的约束条件包括:
14、根据转向系统的响应速度,建立前轮转角的第一约束条件为:
15、abs(δ)≤γ·ωmax·t;
16、根据前轮转角的范围,建立前轮转角的第二约束条件为:
17、δmin≤δ≤δmax;
18、根据车辆的向心加速度,建立车辆车速的约束条件为:
19、
20、其中,δ为前轮转角,γ为转向比,ωmax为转向系统的最大角速度,t为控制周期,δmin为前轮转角的最小值,δmax为前轮转角的最大值,v为车辆车速,δr为参考点的前轮转角,l为前后轮之间的轴距,amax为最大允许横向加速度。
21、可选的,所述目标函数具体为:
22、其中,为状态量,为的转置矩阵,为控制量,为的转置矩阵,q为状态量的权重矩阵,r为控制量的权重矩阵,用于提升控制精度,以减小误差,用于约束控制量的变化量,以提升控制的平稳性和安全性。
23、可选的,在所述控制车辆以最优前轮转角和最优车辆车速行驶之前,包括:
24、获取车辆规划轨迹上预瞄点处的弯道曲率;
25、根据弯道曲率,对最优前轮转角进行补偿,通过公式计算得到补偿后的最优前轮转角,所述公式为:
26、δnew=(δcurr+atan(cr/l);
27、其中,δnew为补偿后的最优前轮转角,δcurr为最优前轮转角,cr为弯道曲率,l为前后轮之间的轴距;
28、将补偿后的最优前轮转角作为新的最优前轮转角。
29、可选的,所述控制车辆以最优前轮转角和最优车辆车速行驶包括:
30、根据最优前轮转角和转向比,通过计算得到最优方向盘转角;
31、控制车辆以最优方向盘转角和最优车辆车速行驶。
32、第二方面,本发明还提供一种无人驾驶车辆弯道控制装置,所述无人驾驶车辆弯道控制装置包括:
33、获取模块,用于获取车辆预测控制模型,所述车辆预测控制模型包括状态量和控制量,所述控制量包括前轮转角和车辆车速;
34、第一建立模块,用于根据转向系统的响应速度、前轮转角的范围和车辆的向心加速度,建立前轮转角和车辆车速的约束条件;
35、第二建立模块,用于根据状态量和控制量,建立目标函数;
36、求解模块,用于将目标函数转化为标准二次型函数,将约束条件作为标准二次型函数的约束,采用二次规划法求解标准二次型函数在约束条件下的解,得到最优控制量;
37、控制模块,用于所述最优控制量包括最优前轮转角和最优车辆车速,控制车辆以最优前轮转角和最优车辆车速行驶,以供通过弯道。
38、可选的,所述第一建立模块,用于:
39、根根据转向系统的响应速度,建立前轮转角的第一约束条件为:
40、abs(δ)≤γ·ωmax·t;
41、根据前轮转角的范围,建立前轮转角的第二约束条件为:
42、δmin≤δ≤δmax;
43、根据车辆的向心加速度,建立车辆车速的约束条件为:
44、
45、其中,δ为前轮转角,γ为转向比,ωmax为转向系统的最大角速度,t为控制周期,δmin为前轮转角的最小值,δmax为前轮转角的最大值,v为车辆车速,δr为参考点的前轮转角,l为前后轮之间的轴距,amax为最大允许横向加速度。
46、第三方面,本发明还提供一种无人驾驶车辆弯道控制设备,所述无人驾驶车辆弯道控制设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的无人驾驶车辆弯道控制程序,其中所述无人驾驶车辆弯道控制程序被所述处理器执行时,实现如上述所述的无人驾驶车辆弯道控制方法的步骤。
47、第四方面,本发明还提供一种可读存储介质,所述可读存储介质上存储有无人驾驶车辆弯道控制程序,其中所述无人驾驶车辆弯道控制程序被处理器执行时,实现如上述所述的无人驾驶车辆弯道控制方法的步骤。
48、本发明中,获取车辆预测控制模型,所述车辆预测控制模型包括状态量和控制量,所述控制量包括前轮转角和车辆车速;根据转向系统的响应速度、前轮转角的范围和车辆的向心加速度,建立前轮转角和车辆车速的约束条件;根据状态量和控制量,建立目标函数;将目标函数转化为标准二次型函数,将约束条件作为标准二次型函数的约束,采用二次规划法求解标准二次型函数在约束条件下的解,得到最优控制量;所述最优控制量包括最优前轮转角和最优车辆车速,控制车辆以最优前轮转角和最优车辆车速行驶,以供通过弯道。本发明通过,在车辆通过弯道时,根据转向系统的响应速度、前轮转角的范围和车辆的向心加速度,建立前轮转角和车辆车速的约束条件,基于模型预测控制方法对车辆进行控制,提升了车辆通过弯道时的安全性。
技术特征:
1.一种无人驾驶车辆弯道控制方法,其特征在于,所述无人驾驶车辆弯道控制方法包括:
2.如权利要求1所述的无人驾驶车辆弯道控制方法,其特征在于,在所述获取车辆预测控制模型之前,包括:
3.如权利要求1所述的无人驾驶车辆弯道控制方法,其特征在于,所述根据转向系统的响应速度、前轮转角的范围和车辆的向心加速度,建立前轮转角和车辆车速的约束条件包括:
4.如权利要求1所述的无人驾驶车辆弯道控制方法,其特征在于,所述目标函数具体为:
5.如权利要求1所述的无人驾驶车辆弯道控制方法,其特征在于,在所述控制车辆以最优前轮转角和最优车辆车速行驶之前,包括:
6.如权利要求1所述的无人驾驶车辆弯道控制方法,其特征在于,所述控制车辆以最优前轮转角和最优车辆车速行驶包括:
7.一种无人驾驶车辆弯道控制装置,其特征在于,所述无人驾驶车辆弯道控制装置包括:
8.如权利要求7所述的无人驾驶车辆弯道控制装置,其特征在于,所述第一建立模块,用于:
9.一种无人驾驶车辆弯道控制设备,其特征在于,所述无人驾驶车辆弯道控制设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的无人驾驶车辆弯道控制程序,其中所述无人驾驶车辆弯道控制程序被所述处理器执行时,实现如权利要求1至6中任一项所述的无人驾驶车辆弯道控制方法的步骤。
10.一种可读存储介质,其特征在于,所述可读存储介质上存储有无人驾驶车辆弯道控制程序,其中所述无人驾驶车辆弯道控制程序被处理器执行时,实现如权利要求1至6中任一项所述的无人驾驶车辆弯道控制方法的步骤。
技术总结
本发明提供一种无人驾驶车辆弯道控制方法、装置、设备及可读存储介质,无人驾驶车辆弯道控制方法包括:获取车辆预测控制模型;根据转向系统的响应速度、前轮转角的范围和车辆的向心加速度,建立前轮转角和车辆车速的约束条件;根据状态量和控制量,建立目标函数;将目标函数转化为标准二次型函数,采用二次规划法求解标准二次型函数在约束条件下的解,得到最优控制量;控制车辆以最优前轮转角和最优车辆车速行驶,以供通过弯道。通过本发明,在车辆通过弯道时,根据转向系统的响应速度、前轮转角的范围和车辆的向心加速度,建立前轮转角和车辆车速的约束条件,基于模型预测控制方法对车辆进行控制,提升了车辆通过弯道时的安全性。
技术研发人员:汪曼,殷政,喻锐,毕雅梦
受保护的技术使用者:东风商用车有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!