无人驾驶车辆控制方法、装置、电子设备及存储介质与流程
本公开涉及无人驾驶,尤其涉及无人驾驶车辆控制方法、装置、电子设备及存储介质。
背景技术:
1、对于无人驾驶车辆的速度规划,需要考虑车辆的动力学性能或运动学约束等因素,对路径上的各点规划出相应的速度,以实现对无人驾驶车辆的控制。
2、然而,相关技术中的速度规划算法通常是基于优化器的方式进行处理,优化器会将限速曲线作为优化对象,并在限速曲线开辟的空间内进行求解。但在限速曲线存在较多凹凸起伏等复杂形状的情况下,优化器直接求解会加大计算复杂程度,并会造成耗时异常或求解超时。因此,相关技术还需要做较多的后处理,会降低求解的精度和准确性,导致无法准确控制车辆的行驶。
技术实现思路
1、本公开提供了一种无人驾驶车辆控制方法、装置、电子设备及存储介质。
2、根据本公开的第一方面,提供了一种无人驾驶车辆控制方法,所述方法包括:
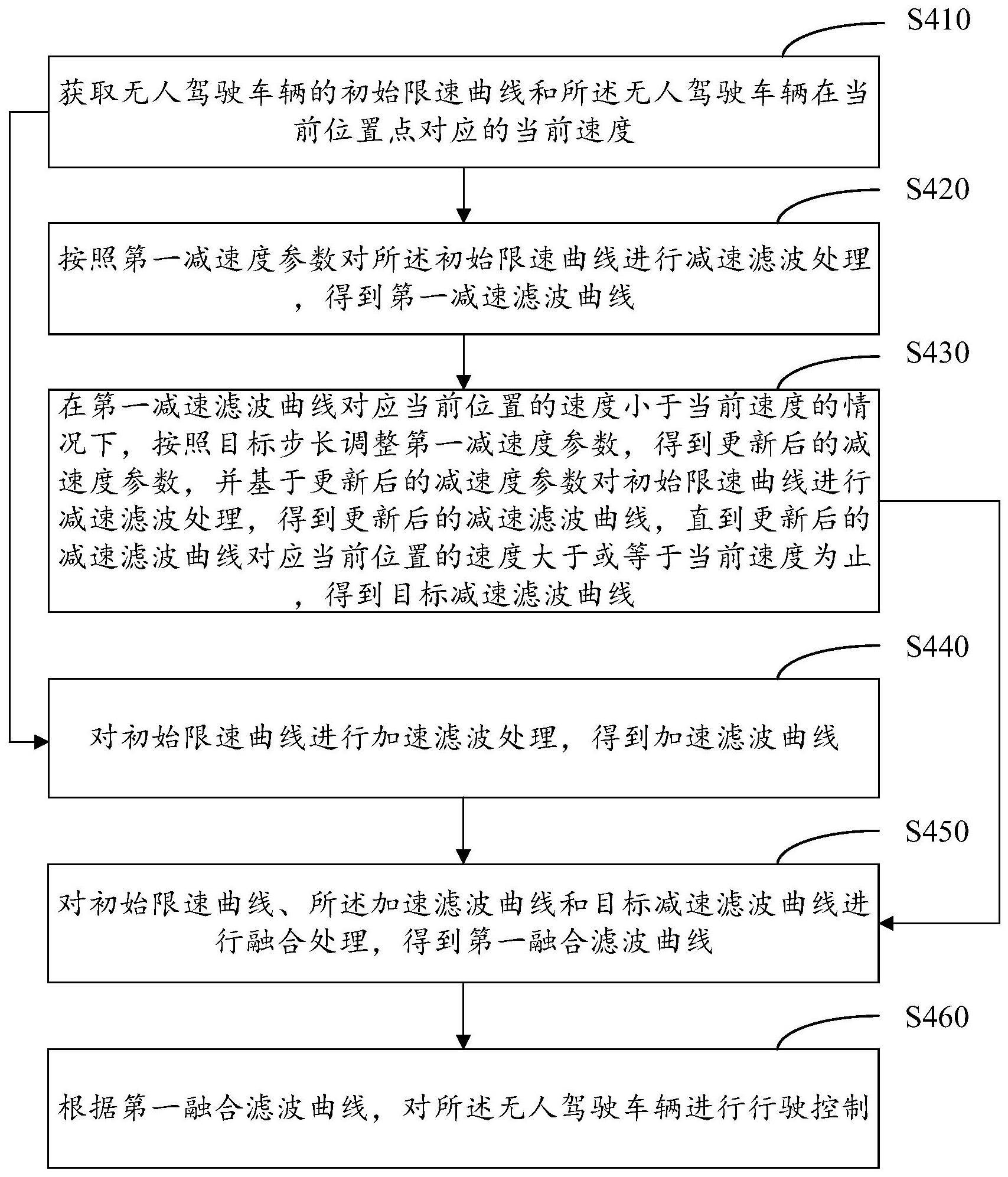
3、获取无人驾驶车辆的初始限速曲线和所述无人驾驶车辆在当前位置点对应的当前速度;
4、按照第一减速度参数对所述初始限速曲线进行减速滤波处理,得到第一减速滤波曲线;
5、在所述第一减速滤波曲线对应当前位置的速度小于所述当前速度的情况下,按照目标步长调整所述第一减速度参数,得到更新后的减速度参数,并基于更新后的减速度参数对所述初始限速曲线进行减速滤波处理,得到更新后的减速滤波曲线,直到更新后的减速滤波曲线对应当前位置的速度大于或等于所述当前速度为止,得到目标减速滤波曲线;
6、对所述初始限速曲线进行加速滤波处理,得到加速滤波曲线;
7、对所述初始限速曲线、所述加速滤波曲线和所述目标减速滤波曲线进行融合处理,得到第一融合滤波曲线;
8、根据所述第一融合滤波曲线,对所述无人驾驶车辆进行行驶控制。
9、根据本公开的第二方面,提供了一种无人驾驶车辆控制装置,所述装置包括:
10、获取模块,用于获取无人驾驶车辆的初始限速曲线和所述无人驾驶车辆在当前位置点对应的当前速度;
11、第一减速滤波曲线获取模块,用于按照第一减速度参数对所述初始限速曲线进行减速滤波处理,得到第一减速滤波曲线;
12、目标减速滤波曲线获取模块,用于在所述第一减速滤波曲线对应当前位置的速度小于所述当前速度的情况下,按照目标步长调整所述第一减速度参数,得到更新后的减速度参数,并基于更新后的减速度参数对所述初始限速曲线进行减速滤波处理,得到更新后的减速滤波曲线,直到更新后的减速滤波曲线对应当前位置的速度大于或等于所述当前速度为止,得到目标减速滤波曲线;
13、加速滤波处理模块,用于对所述初始限速曲线进行加速滤波处理,得到加速滤波曲线;
14、第一融合处理模块,用于对所述初始限速曲线、所述加速滤波曲线和所述目标减速滤波曲线进行融合处理,得到第一融合滤波曲线;
15、控制模块,用于根据所述第一融合滤波曲线,对所述无人驾驶车辆进行行驶控制。
16、根据本公开的第三方面,提供了一种电子设备。该电子设备包括:存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现如以上所述的方法。
17、根据本公开的第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现本公开的上述方法。
18、本公开实施例提供的无人驾驶车辆控制方法、装置、电子设备及存储介质,通过获取无人驾驶车辆的初始限速曲线和无人驾驶车辆在当前位置点对应的当前速度;按照第一减速度参数对初始限速曲线进行减速滤波处理,得到第一减速滤波曲线;在第一减速滤波曲线对应当前位置的速度小于当前速度的情况下,按照目标步长调整第一减速度参数,得到更新后的减速度参数,并基于更新后的减速度参数对初始限速曲线进行减速滤波处理,得到更新后的减速滤波曲线,直到更新后的减速滤波曲线对应当前位置的速度大于或等于当前速度为止,得到目标减速滤波曲线;对初始限速曲线进行加速滤波处理,得到加速滤波曲线;对初始限速曲线、加速滤波曲线和目标减速滤波曲线进行融合处理,得到第一融合滤波曲线;根据第一融合滤波曲线,对无人驾驶车辆进行行驶控制。这样在第一减速度参数的基础上,通过目标步长逐步调整减速度参数,使得通过调整后的减速度参数对初始限速曲线进行滤波获得的目标滤波曲线更加平滑,进而通过融合初始限速曲线、加速滤波曲线和目标减速滤波曲线得到的第一融合滤波曲线更加平滑。本公开可以在不增加计算复杂度的情况下,得到更加平滑的融合滤波曲线,进而可以通过融合滤波曲线实现对无人驾驶车辆更加准确和平稳的行驶控制。
技术特征:
1.一种无人驾驶车辆控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述按照目标步长调整所述第一减速度参数,得到更新后的减速度参数,包括:
3.根据权利要求1或2所述的方法,其特征在于,所述方法还包括:
4.根据权利要求1所述的方法,其特征在于,所述按照第一减速度参数对所述初始限速曲线进行减速滤波处理,得到第一减速滤波曲线包括:
5.根据权利要求1或4所述的方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,所述对所述初始限速曲线、所述加速滤波曲线和所述目标减速滤波曲线进行融合处理,得到第一融合滤波曲线包括:
7.根据权利要求6所述的方法,其特征在于,所述确定各个速度中满足指定条件的目标速度包括:
8.一种无人驾驶车辆控制装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,当所述计算机可读存储介质中的指令由电子设备的处理器执行时,使得所述电子设备能够执行如权利要求1-7中任一项所述的方法。
技术总结
本公开涉及无人驾驶车辆控制方法、装置、电子设备及存储介质,其方法包括:获取初始限速曲线和无人驾驶车辆的当前速度;按照第一减速度参数对初始限速曲线进行减速滤波处理,得到的第一减速滤波曲线对应当前位置的速度小于当前速度的情况下,按照目标步长调整第一减速度参数,得到更新后的减速度参数,并基于更新后的减速度参数对初始限速曲线进行减速滤波处理,以得到目标减速滤波曲线;对初始限速曲线进行加速滤波处理,得到加速滤波曲线;通过对上述曲线进行融合处理得到第一融合滤波曲线;根据第一融合滤波曲线,对无人驾驶车辆进行行驶控制。这样无人驾驶车辆在基于第一融合滤波曲线对应的速度行驶时,可以实现对车辆的平稳控制。
技术研发人员:姚阔,李泽文
受保护的技术使用者:北京易控智驾科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!