一种斩波控制方法及装置与流程
本发明涉及轨道车辆制动领域,尤其涉及一种斩波控制方法及装置。
背景技术:
1、城市轨道交通车辆的制动方式分为机械制动和电制动,机械制动主要由制动系统系统通过液压或空气压力控制机械闸瓦施加摩擦力完成,而电制动由牵引系统控制牵引电机产生电制动力完成。电制动可以将车辆动能转换为电能再生回馈给电网,同时可以避免机械制动的闸瓦磨耗,因此电制动是车辆最优先采用的制动方式,但是在网侧吸收能力不足的情况下,电制动会导致网压不断升高而引起再生失效,所以必须设置制动电阻将多余的再生能量消耗掉才能保证电制动的持续工作。
2、因为散热因素的限制,斩波回路功率开关器件的频率会要求尽可能低,而低开关频率的斩波控制会带来电容电压波动变大的问题,同时因为延时的增加可能还会导致斩波控制的不稳定。
技术实现思路
1、本发明的目的是针对现有技术的缺陷,提供一种斩波控制方法及系统,可以在斩波回路功率器件开关频率更低的情况下稳定斩波占空比,同时可避免斩波控制策略中斩波模式的频繁切换,从而提升斩波控制的稳定性。
2、为实现上述目的,本发明第一方面提供了一种斩波控制方法,所述方法包括:
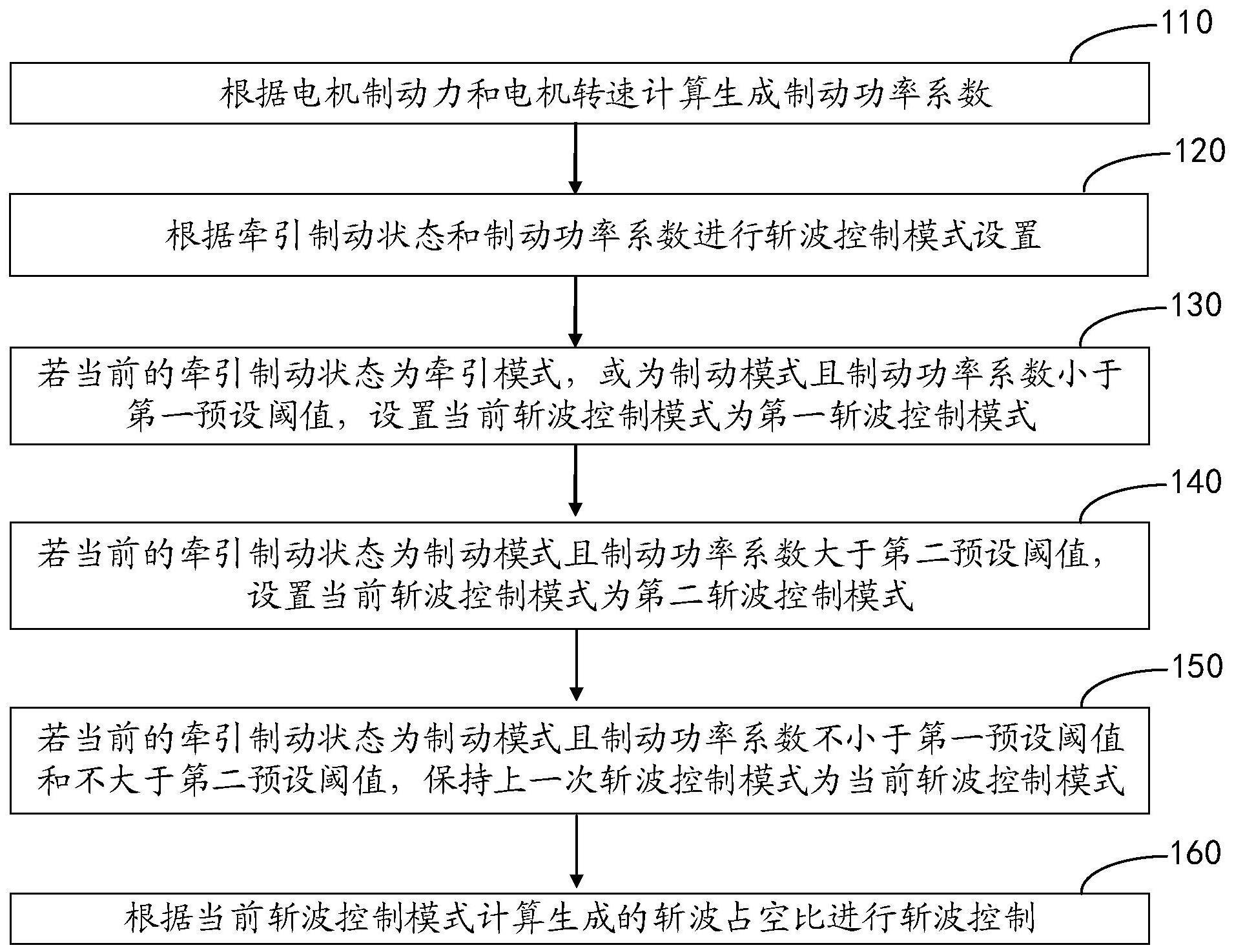
3、根据电机制动力和电机转速计算生成制动功率系数;
4、根据牵引制动状态和所述制动功率系数进行斩波控制模式设置;
5、若当前的牵引制动状态为牵引模式,或为制动模式且所述制动功率系数小于第一预设阈值,设置当前斩波控制模式为第一斩波控制模式;
6、若当前的牵引制动状态为制动模式且所述制动功率系数大于第二预设阈值,设置当前斩波控制模式为第二斩波控制模式;
7、若当前的牵引制动状态为制动模式且所述制动功率系数不小于第一预设阈值和不大于第二预设阈值,保持上一次斩波控制模式为当前斩波控制模式;
8、根据当前斩波控制模式计算生成的斩波占空比进行斩波控制。
9、进一步,所述第一斩波控制模式为基于支撑电容实时电压值计算斩波占空比。
10、进一步,所述第二斩波控制模式为基于实时制动功率前馈计算斩波占空比。
11、进一步,所述基于支撑电容实时电压值计算斩波占空比,具体为:
12、将所述支撑电容实时电压值与预设的斩波起始阈值做差生成电压偏差值;
13、根据kp控制值和所述电压偏差值计算生成斩波占空比。
14、进一步,所述预设的斩波起始阈值根据实时制动功率设置。
15、进一步,所述基于实时制动功率前馈计算斩波占空比,具体计算公式为:
16、
17、其中,d为斩波占空比,r为制动电阻冷态阻值,p制动为电制动功率,udc为支撑电容电压瞬时值,idc_hpf为网流高频分量提取值,udc_fil为支撑电容电压滤波值,ucoeff为斩波功率调整系数。
18、进一步,根据所述支撑电容电压滤波值设置斩波功率调整系数。
19、进一步,所述根据所述支撑电容电压滤波值设置斩波功率调整系数,具体为:所述斩波功率调整系数与所述支撑电容电压滤波值正相关。
20、本发明第二方面提供了一种斩波控制装置,所述装置包括:
21、数据处理模块,用于根据电机制动力和电机转速计算生成制动功率系数;根据牵引制动状态和所述制动功率系数进行斩波控制模式设置;
22、若当前的牵引制动状态为牵引模式,或为制动模式且所述制动功率系数小于第一预设阈值,设置当前斩波控制模式为第一斩波控制模式;
23、若当前的牵引制动状态为制动模式且所述制动功率系数大于第二预设阈值,设置当前斩波控制模式为第二斩波控制模式;
24、若当前的牵引制动状态为制动模式且所述制动功率系数不小于第一预设阈值和不大于第二预设阈值,保持上一次斩波控制模式为当前斩波控制模式;
25、控制执行模块,用于根据当前斩波控制模式计算生成的斩波占空比进行斩波控制。
26、本发明提供的一种斩波控制方法及装置,可以在斩波回路功率器件开关频率更低的情况下稳定斩波占空比,通过牵引制动状态和制动功率系数的大小判断两种斩波模式的切换,避免了斩波控制策略中斩波模式的频繁切换,从而提升了斩波控制的稳定性。
技术特征:
1.一种斩波控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的斩波控制方法,其特征在于,所述第一斩波控制模式为基于支撑电容实时电压值计算斩波占空比。
3.根据权利要求1所述的斩波控制方法,其特征在于,所述第二斩波控制模式为基于实时制动功率前馈计算斩波占空比。
4.根据权利要求2所述的斩波控制方法,其特征在于,所述基于支撑电容实时电压值计算斩波占空比,具体为:
5.根据权利要求4所述的斩波控制方法,其特征在于,所述预设的斩波起始阈值根据实时制动功率设置。
6.根据权利要求3所述的斩波控制方法,其特征在于,所述基于实时制动功率前馈计算斩波占空比,具体计算公式为:
7.根据权利要求6所述的斩波控制方法,其特征在于,根据所述支撑电容电压滤波值设置斩波功率调整系数。
8.根据权利要求7所述的斩波控制方法,其特征在于,所述根据所述支撑电容电压滤波值设置斩波功率调整系数,具体为:所述斩波功率调整系数与所述支撑电容电压滤波值正相关。
9.一种斩波控制装置,其特征在于,所述装置包括:
技术总结
本发明涉及一种斩波控制方法及装置,方法包括:根据电机制动力和电机转速计算生成制动功率系数;根据牵引制动状态和制动功率系数进行斩波控制模式设置;若当前的牵引制动状态为牵引模式,或为制动模式且制动功率系数小于第一预设阈值,设置当前斩波控制模式为第一斩波控制模式;若当前的牵引制动状态为制动模式且制动功率系数大于第二预设阈值,设置当前斩波控制模式为第二斩波控制模式;若当前的牵引制动状态为制动模式且制动功率系数不小于第一预设阈值和不大于第二预设阈值,保持上一次斩波控制模式为当前斩波控制模式;根据当前斩波控制模式计算生成的斩波占空比进行斩波控制。
技术研发人员:张新宇,张佳波,孙伟,陈卓,林显琦
受保护的技术使用者:中车青岛四方车辆研究所有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!