巡航控制方法、装置、电子设备及存储介质与流程
本申请涉及汽车,特别是涉及一种巡航控制方法、装置、电子设备及存储介质。
背景技术:
1、目前多数车型均会配备巡航功能,目的是让车辆自动实现车速控制,解放驾驶员双脚,驾驶员只需专注操作方向盘即可。对于越野车还会配备越野巡航功能,可以适用于越野(路面崎岖不平)工况,此时需要车辆的行驶车速不高于30kph。现有的越野巡航的控制是通过pid(proportion integral differential)闭环控制方法,将车辆看作一个整体的非线性系统,认为系统的传递函数是固定的,通常越野巡航标定时,会直接或间接的对pid参数进行调节,以对车辆的扭矩或制动响应速度、响应幅度、响应的稳定性进行优化,使其达到理想的状态。
2、但是在实际行驶过程中,车辆姿态是会变化的,例如,在平路匀速行驶时,系统的传递函数为h1,车速请求增加△v后,发动机请求扭矩应该增加△t,根据此时标定的pid参数,扭矩响应大小合适,在t1时间内可完成速度目标的追踪;如果改为爬坡行驶,车辆的行驶阻力变大,此时还用平路时标定的pid参数,虽然发动机依然可以达到相应的扭矩值,但此时系统的传递函数已经发生变化,变为h2,要达到速度增量△v,所需的时间会变为t2。综上可知,在车辆姿态变化后,系统的传递函数随即发生变化,通过标定的pid参数无法使各个行驶状态下的越野巡航性能达到最优。
技术实现思路
1、本申请实施例提供了一种巡航控制方法、装置、电子设备及存储介质,以解决现有技术中车辆巡航时采用标定的pid参数会降低巡航性能的问题。
2、第一方面,本申请实施例提供了一种巡航控制方法,所述方法包括:
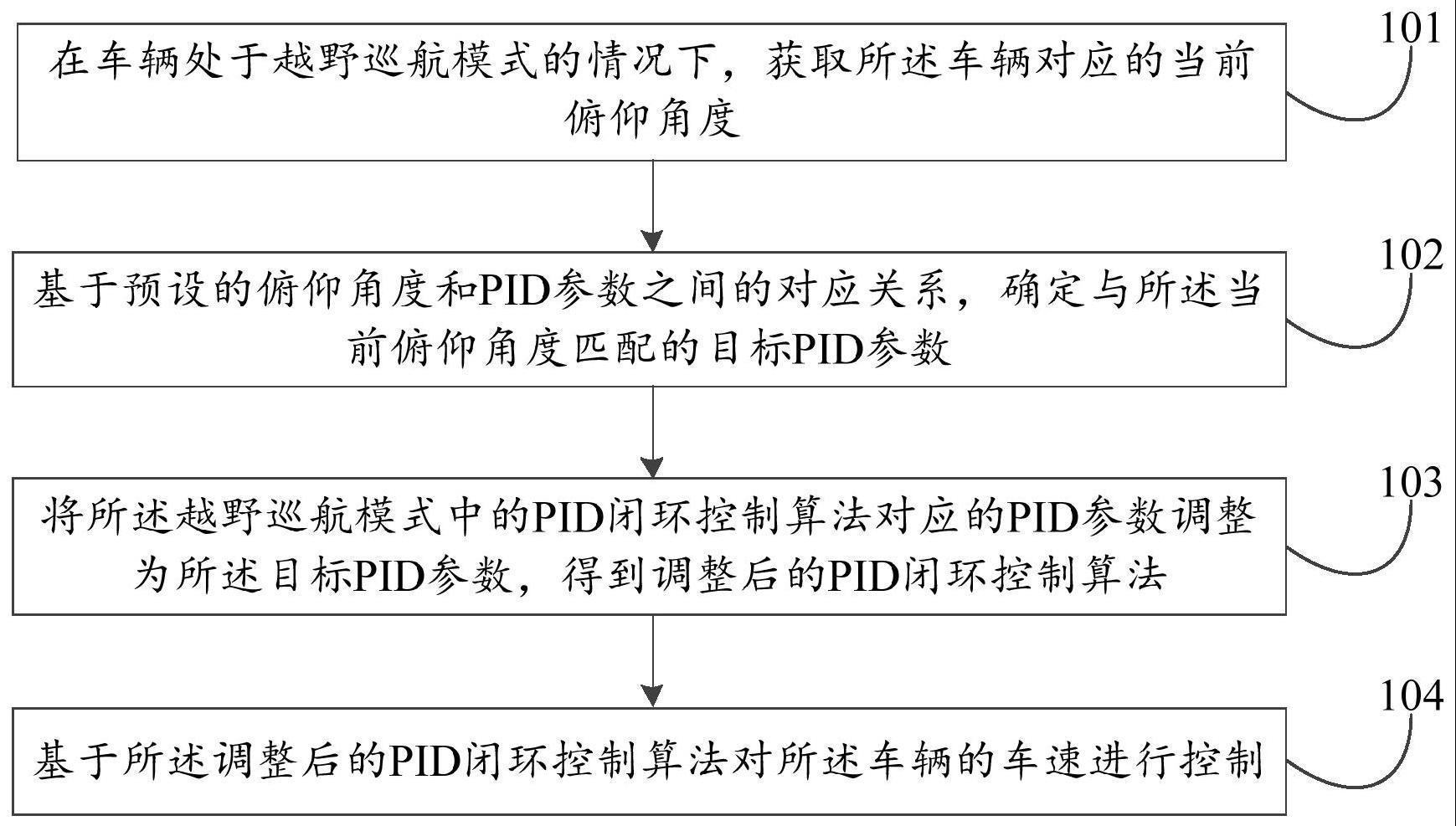
3、在车辆处于越野巡航模式的情况下,获取所述车辆对应的当前俯仰角度;
4、基于预设的俯仰角度和pid参数之间的对应关系,确定与所述当前俯仰角度匹配的目标pid参数;
5、将所述越野巡航模式中的pid闭环控制算法对应的pid参数调整为所述目标pid参数,得到调整后的pid闭环控制算法;
6、基于所述调整后的pid闭环控制算法对所述车辆的车速进行控制。
7、第二方面,本申请实施例还提供一种巡航控制装置,所述装置包括:
8、第一获取模块,用于在车辆处于越野巡航模式的情况下,获取所述车辆对应的当前俯仰角度;
9、第一确定模块,用于基于预设的俯仰角度和pid参数之间的对应关系,确定与所述当前俯仰角度匹配的目标pid参数;
10、调整模块,用于将所述越野巡航模式中的pid闭环控制算法对应的pid参数调整为所述目标pid参数,得到调整后的pid闭环控制算法;
11、控制模块,用于基于所述调整后的pid闭环控制算法对所述车辆的车速进行控制。
12、第三方面,本申请实施例提供了一种电子设备,该电子设备包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现上述的巡航控制方法。
13、第四方面,本申请实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现上述的巡航控制方法。
14、本申请实施例的技术方案,通过获取车辆行驶过程中的当前俯仰角度,确定出与当前俯仰角度匹配的目标pid参数,并对pid闭环控制算法进行调整,得到调整后的pid闭环控制算法,从而可以基于该由当前俯仰角度确定的调整后的pid闭环控制算法对车速进行控制,进而可以消除车辆在上下坡时车辆姿态的变化对巡航性能的影响。
技术特征:
1.一种巡航控制方法,其特征在于,包括:
2.根据权利要求1所述的巡航控制方法,其特征在于,获取所述车辆对应的当前俯仰角度,包括:
3.根据权利要求1所述的巡航控制方法,其特征在于,所述目标pid参数包括目标p参数、目标i参数和目标d参数,基于预设的俯仰角度和pid参数之间的对应关系,确定与所述当前俯仰角度匹配的目标pid参数,包括:
4.根据权利要求1所述的巡航控制方法,其特征在于,基于所述调整后的pid闭环控制算法对所述车辆进行巡航控制,包括:
5.根据权利要求4所述的巡航控制方法,其特征在于,基于所述车辆控制信号,对所述车辆进行巡航控制,包括:
6.根据权利要求1所述的巡航控制方法,其特征在于,在基于预设的俯仰角度和pid参数之间的对应关系之前,所述方法还包括:
7.根据权利要求6所述的巡航控制方法,其特征在于,所述获取预设的俯仰角度和pid参数之间的对应关系,包括:
8.一种巡航控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现权利要求1至7任一项所述的巡航控制方法中的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1至7任一项所述的巡航控制方法中的步骤。
技术总结
本申请提供一种巡航控制方法、装置、电子设备及存储介质,其中,该巡航控制方法包括:在车辆处于越野巡航模式的情况下,获取车辆对应的当前俯仰角度;基于预设的俯仰角度和PID参数之间的对应关系,确定与当前俯仰角度匹配的目标PID参数;将越野巡航模式中的PID闭环控制算法对应的PID参数调整为目标PID参数,得到调整后的PID闭环控制算法;基于调整后的PID闭环控制算法对车辆的车速进行控制。本申请可以基于由当前俯仰角度确定的调整后的PID闭环控制算法对车速进行控制,可以消除车辆在上下坡时车辆姿态的变化对巡航性能的影响。
技术研发人员:路乐乐,张宁宁,刘逸涵,张宗斌,张士亮
受保护的技术使用者:长城汽车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!