车辆的驾驶辅助装置、驾驶辅助方法及记录介质与流程
本发明涉及判定车辆有无碰撞的驾驶辅助装置、驾驶辅助方法及记录介质。
背景技术:
1、以往,已知有预测本车辆与其他车辆的碰撞位置来进行辅助驾驶的技术。在专利文献1的驾驶辅助装置中,假定为本车辆以保持当前时间点的车辆速度的方式直行,并且其他车辆保持当前时间点的速度。在预想到本车辆与其他车辆在预想为其他车辆要通过的区域与本车辆要通过的区域重叠的交叉区域中碰撞的情况下,将其他车辆指定为横穿物标。然后,以使本车辆从比被预想为本车辆与横穿物标碰撞的时间点即预测碰撞时间点更靠前的时间点起以减速度进行减速的方式,控制本车辆的制动装置。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2021-187207号公报
技术实现思路
1、技术问题
2、专利文献1的碰撞判定装置在本车辆正在直行的情况下是有效。但是,在本车辆正在弯道、交叉路口等转弯行驶的情况下,存在碰撞判定难以发挥功能这样的课题。
3、技术方案
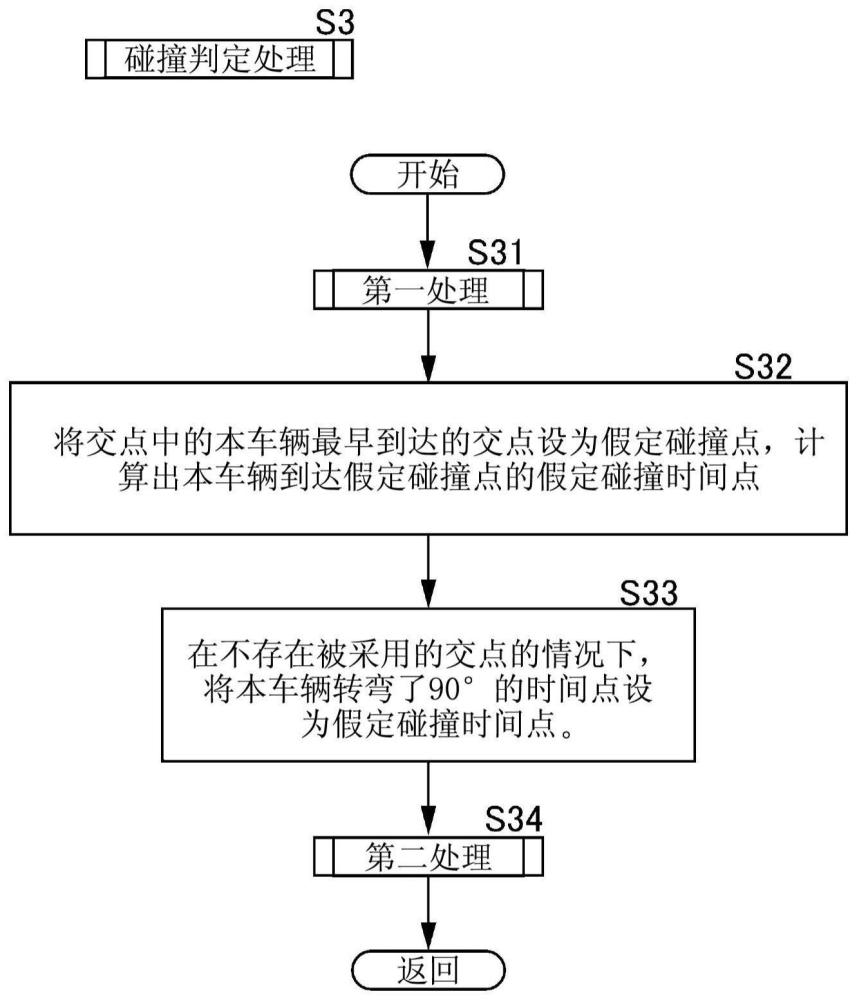
4、本发明的一个实施例中的车辆的驾驶辅助装置的特征在于,根据在多个时间点获得的本车辆的横摆率计算出横摆率变化率,计算出其他车辆的预测轨迹即其他车预测轨迹,并且在所述横摆率变化率保持为恒定的前提下计算出所述本车辆的预测轨迹即本车预测轨迹,根据所述本车预测轨迹与所述其他车预测轨迹的交点计算出假定碰撞点,并计算出所述本车辆到达所述假定碰撞点的假定碰撞时间点,以所述假定碰撞时间点的所述本车辆和所述其他车辆进行直行为前提,利用直行交叉来进行有无碰撞的判定。
5、本发明的一个实施例中的车辆的驾驶辅助方法的特征在于,使计算机执行如下步骤:根据在多个时间点获得的本车辆的横摆率计算出横摆率变化率的步骤;计算出其他车辆的预测轨迹即其他车预测轨迹,并且在所述横摆率变化率保持为恒定的前提下预测所述本车辆的预测轨迹即本车预测轨迹的步骤;根据所述本车预测轨迹与所述其他车预测轨迹的交点计算出假定碰撞点,并计算出所述本车辆到达所述假定碰撞点的假定碰撞时间点的步骤;以及以所述假定碰撞时间点的所述本车辆和所述其他车辆进行直行为前提,利用直行交叉来进行有无碰撞的判定的步骤。
6、本发明的一个实施例中的记录介质的特征在于,能够被计算机读取,并存储有用于使计算机执行以下步骤的程序:根据在多个时间点获得的本车辆的横摆率计算出横摆率变化率的步骤;计算出其他车辆的预测轨迹即其他车预测轨迹,并且在所述横摆率变化率保持为恒定的前提下预测所述本车辆的预测轨迹即本车预测轨迹的步骤;根据所述本车预测轨迹与所述其他车预测轨迹的交点计算出假定碰撞点,并计算出所述本车辆到达所述假定碰撞点的假定碰撞时间点的步骤;以及以所述假定碰撞时间点的所述本车辆和所述其他车辆进行直行为前提,利用直行交叉来进行有无碰撞的判定的步骤。
7、发明效果
8、在本发明的一个实施例中的车辆的驾驶辅助装置中,在本车辆行驶在回旋曲线的驾驶辅助中,能够进行碰撞位置的预测、有无碰撞的判定。
技术特征:
1.一种车辆的驾驶辅助装置,其特征在于,
2.根据权利要求1所述的车辆的驾驶辅助装置,其特征在于,
3.根据权利要求1所述的车辆的驾驶辅助装置,其特征在于,
4.根据权利要求1至3中任一项所述的车辆的驾驶辅助装置,其特征在于,
5.根据权利要求1至3中任一项所述的车辆的驾驶辅助装置,其特征在于,
6.一种车辆的驾驶辅助方法,其特征在于,使计算机执行如下步骤:
7.一种记录介质,其特征在于,能够被计算机读取,并存储有用于使计算机执行以下步骤的程序:
技术总结
本发明提供车辆的驾驶辅助装置、驾驶辅助方法及记录介质。在本车辆行驶在回旋曲线的驾驶辅助中,难以进行碰撞位置的预测、有无碰撞的判定。根据在多个时间点获得的本车辆的横摆率计算出横摆率变化率,计算出其他车辆的预测轨迹即其他车预测轨迹,并且在所述横摆率变化率保持为恒定的前提下计算出所述本车辆的预测轨迹即本车预测轨迹,根据所述本车预测轨迹与所述其他车预测轨迹的交点计算出假定碰撞点,并计算出所述本车辆到达所述假定碰撞点的假定碰撞时间点,以所述假定碰撞时间点的所述本车辆与所述其他车辆进行直行为前提,利用直行交叉进行有无碰撞的判定。
技术研发人员:香园和也,桐原宇理
受保护的技术使用者:株式会社斯巴鲁
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!