一种车辆切入控制方法、装置、设备及存储介质与流程
本发明涉及自动驾驶,尤其涉及一种车辆切入控制方法、装置、设备及存储介质。
背景技术:
1、随着智能网联汽车的高速发展以及高级辅助驾驶技术市场搭载率不断提升,自适应巡航功能作为商业化最成熟以及用户使用最高频的功能之一,其性能好坏直接决定整个智驾功能给用户带来的体验感。然而,国内复杂的行驶环境叠加目标车辆驾驶员不确定的行驶轨迹造成自适应巡航系统在许多工况下功能受限或失效。比如,一些激进的老司机经常在道路上快速危险变道或者近距离加塞变道,这种环境下传统的自适应巡航系统在前方车辆大部分或全部车身切入自车道后才会进行减速且会带来过度减速以避免与切入车辆碰撞,极容易与后方车辆发生碰撞。
2、前车切入工况的稳定性作为衡量自适应巡航功能用户使用安全感的关键一环,其需要具有精确控制车辆的速度和距离、高效的切入决策算法、实时的切入控制策略等特点,以满足车辆自动驾驶高精度、高实时、高可靠的需求。传统提高前车切入性能的方法主要利用横向速度和横向距离来进行预测,但存在切入识别晚、识别不稳定以及减速性能差等问题。
3、因此,如何准确辨识前车切入风险,并保证自车的行车安全,是目前亟需解决的技术问题。
技术实现思路
1、本发明主要目的在于提供一种车辆切入控制方法、装置、设备及存储介质,能够有效解决全速域全场景下切入识别晚和识别不稳定的问题,并且有效提升了减速舒适性和降低了行车安全风险,有效避免了紧急工况下减速性能差的问题。
2、第一方面,本申请提供了一种车辆切入控制方法,其中该方法包括步骤:
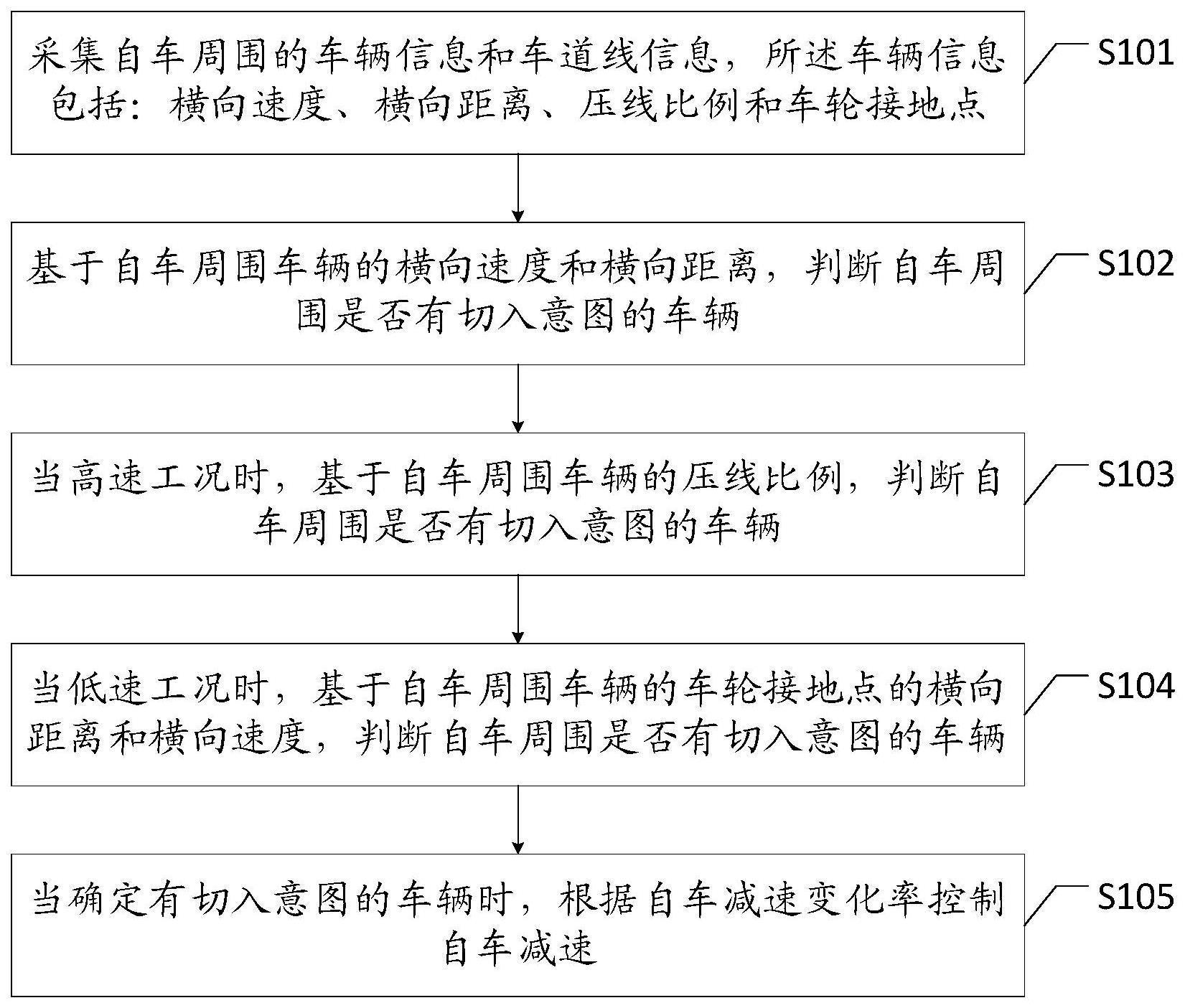
3、采集自车周围的车辆信息和车道线信息,所述车辆信息包括:横向速度、横向距离、压线比例和车轮接地点;
4、基于自车周围车辆的横向速度和横向距离,判断自车周围是否有切入意图的车辆;
5、当高速工况时,基于自车周围车辆的压线比例,判断自车周围是否有切入意图的车辆;
6、当低速工况时,基于自车周围车辆的车轮接地点的横向距离和横向速度,判断自车周围是否有切入意图的车辆;
7、当确定有切入意图的车辆时,根据自车减速度自适应调整减速度变化率,以控制自车减速。
8、结合上述第一方面,作为一种可选的实现方式,判断目标车辆当前横向速度是否大于第一设定阈值;
9、若是,根据所述目标车辆的横向速度预测所述目标车辆未来一段时间后的所述目标车辆所处位置横向距离;
10、对预测后的横向距离进行滤波,并建立前车切入概率模型;
11、利用切入概率模型计算所述目标车辆切入概率是否大于第二设定阈值;
12、若是,判断所述目标车辆为有切入意图的车辆。
13、结合上述第一方面,作为一种可选的实现方式,根据自车与车道线的夹角以及自车与目标车辆边缘的夹角,计算目标车辆的压线比例;
14、基于所述目标车辆的压线比例,判断目标车辆是否压线;
15、若是,计算目标车辆与自车的横向安全距离,并当实际横向距离小于所述横向安全距离时,判断目标车辆为有切入意图的车辆。
16、结合上述第一方面,作为一种可选的实现方式,
17、结合上述第一方面,作为一种可选的实现方式,根据公式:计算目标车辆与自车的横向安全距离,其中dsafe为横向安全距离,widthego为自车车宽,widthojb为目标车车宽。
18、结合上述第一方面,作为一种可选的实现方式,当目标车辆车轮接地点处的横向速度大于第三设定阈值时,判断目标车辆为有切入意图的车辆;
19、当目标车辆车轮接地点处的横向速度小于第三设定阈值时,则不进行切入预测判断,根据前轮横向距离和车辆航向角来判断是否存在碰撞风险。
20、结合上述第一方面,作为一种可选的实现方式,根据公式:jerk=(axcv-axcvold)/p,计算自车减速变化率,其中axcv为自车当前周期的减速度,axcvold为上一周期的减速度,p为时间系数;
21、根据自车减速度大小自适应调整减速度变化率控制车辆在不同工况下快速响应。
22、结合上述第一方面,作为一种可选的实现方式,根据摄像头和毫米波雷达识别自车周围的车辆信息和车道线信息。
23、第二方面,本申请提供了一种车辆切入控制装置,该装置包括
24、采集模块,其用于采集自车周围的车辆信息和车道线信息,所述车辆信息包括:横向速度、横向距离、压线比例和车轮接地点;
25、决策模块,其用于基于自车周围车辆的横向速度和横向距离,判断自车周围是否有切入意图的车辆;
26、当高速工况时,基于自车周围车辆的压线比例,判断自车周围是否有切入意图的车辆;
27、当低速工况时,基于自车周围车辆的车轮接地点的横向距离和横向速度,判断自车周围是否有切入意图的车辆;
28、控制模块,其用于当确定有切入意图的车辆时,根据自车减速度自适应调整减速度变化率,以控制自车减速。
29、第三方面,本申请还提供了一种电子设备,所述电子设备包括:处理器;存储器,所述存储器上存储有计算机可读指令,所述计算机可读指令被所述处理器执行时,实现第一方面任一项所述的方法。
30、第四方面,本申请还提供了一种计算机可读存储介质,其存储有计算机程序指令,当所述计算机程序指令被计算机执行时,使计算机执行第一方面任一项所述的方法。
31、本申请提供的一种车辆切入控制方法、装置、设备及存储介质,其中该方法包括步骤:采集自车周围的车辆信息和车道线信息,所述车辆信息包括:横向速度、横向距离、压线比例和车轮接地点;基于自车周围车辆的横向速度和横向距离,判断自车周围是否有切入意图的车辆;当高速工况时,基于自车周围车辆的压线比例,判断自车周围是否有切入意图的车辆;当低速工况时,基于自车周围车辆的车轮接地点的横向距离和横向速度,判断自车周围是否有切入意图的车辆;当确定有切入意图的车辆时,根据自车减速度自适应调整减速度变化率,以控制自车减速。本申请能够有效解决全速域全场景下切入识别晚和识别不稳定的问题,并且有效提升了减速舒适性和降低了行车安全风险,有效避免了紧急工况下减速性能差的问题。
32、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本发明。
技术特征:
1.一种车辆切入控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述基于自车周围车辆的横向速度和横向距离,判断自车周围是否有切入意图的车辆,包括:
3.根据权利要求1所述的方法,其特征在于,所述当高速工况时,基于自车周围车辆的压线比例,判断自车周围是否有切入意图的车辆,还包括:
4.根据权利要求3所述的方法,其特征在于,包括:
5.根据权利要求1所述的方法,其特征在于,所述当低速工况时,基于自车周围车辆的车轮接地点的横向距离和横向速度,判断自车周围是否有切入意图的车辆,还包括:
6.根据权利要求1所述的方法,其特征在于,所述当确定有切入意图的车辆时,根据自车减速度自适应调整减速度变化率,以控制自车减速,包括:
7.根据权利要求1所述的方法,其特征在于,所述判断自车周围是否有切入意图的车辆之前,包括:
8.一种车辆切入控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备,包括:
10.一种计算机可读存储介质,其特征在于,其存储有计算机程序指令,当所述计算机程序指令被计算机执行时,使计算机执行根据权利要求1至7中任一项所述的方法。
技术总结
本发明公开了一种车辆切入控制方法、装置、设备及存储介质,其中该方法包括步骤:采集自车周围的车辆信息和车道线信息,所述车辆信息包括:横向速度、横向距离、压线比例和车轮接地点;基于自车周围车辆的横向速度和横向距离,判断自车周围是否有切入意图的车辆;当高速工况时,基于自车周围车辆的压线比例,判断自车周围是否有切入意图的车辆;当低速工况时,基于自车周围车辆的车轮接地点的横向距离和横向速度,判断自车周围是否有切入意图的车辆;当确定有切入意图的车辆时,根据自车减速度自适应调整减速度变化率,以控制自车减速。本申请有效解决全速域全场景下切入识别晚和识别不稳定的问题,并且提升了减速舒适性,降低了行车安全风险。
技术研发人员:任聪,沈忱,钟小凡
受保护的技术使用者:岚图汽车科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!