轮胎液压挖掘机制动稳定性控制方法、系统、设备及介质与流程
本发明涉及轮胎液压挖掘机制动稳定性控制方法、系统、设备及介质,属于工程机械。
背景技术:
1、轮式挖掘机其行驶速度高、转场灵活,市场保有量在进一步增加。行驶制动作为轮式挖掘机的基本功能至关重要,其制动稳定性更是行车安全的重中之重。但作为液压驱动和机械制动,特别是行驶速度快、重心高的车辆,制动过程中极易产生后轮离地甚至倾翻的现象,对车辆和人身安全都存在威胁。
2、现有技术方案中,如图1所示,齿轮泵提供液压系统动力源,充液阀和蓄能器保证液压油流量和压力控制,制动过程中,驾驶员踩下制动脚踏阀控制高压油方向,建立液压油缸压力和位移,并推动刹车片进行制动控制。通过制动油缸和摩擦片产生摩擦力,对轮胎的转动产生阻力,进而对整车制动。行驶制动过程中,特别是高速行驶时,摩擦片极易锁死,车辆惯性过大常导致后轮离地,制动稳定性差。
技术实现思路
1、为解决现有技术的不足,本发明的目的在于提供轮胎液压挖掘机制动稳定性控制方法、系统、设备及介质,解决了现有技术中摩擦片极易锁死,车辆惯性过大常导致后轮离地,制动稳定性差的问题。
2、为了实现上述目标,本发明采用如下的技术方案:
3、一种轮胎式液压挖掘机制动稳定性控制方法,包括如下步骤:
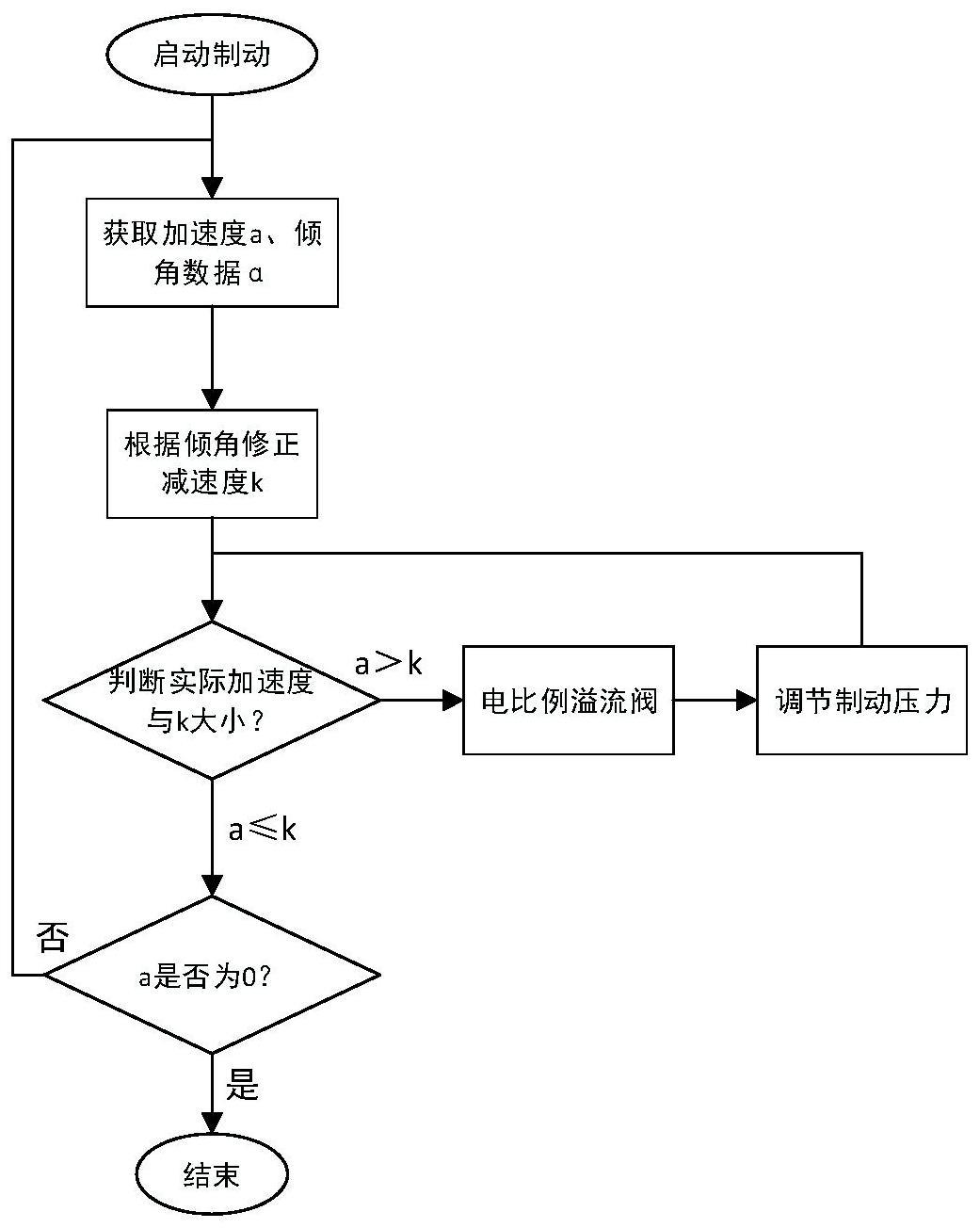
4、基于制动过程中实时采集的车辆倾角α,计算倾角修订值k;
5、基于倾角修订值k和制动过程中实时采集的车辆实际加速度a,判定车辆状态,并执行相应操作:若a>k,则控制电比例溢流阀调节制动压力;若a≤k且a≠0,则重新采集新的车辆倾角α,并重新计算倾角修订值k;若a=0,则执行结束。
6、进一步地,前述倾角修订值k的计算式为:
7、k=k0-k0×sinα
8、式中,k0为车辆默认设定的最大制动加速度。
9、进一步地,前述若a>k,则控制电比例溢流阀调节制动压力的步骤包括:
10、计算调节压力p:
11、
12、式中:m为整车质量,i桥为轮胎与刹车片件的速比,e为常数,u为摩擦片摩擦系数,s为制动油缸横截面积,f为制动油缸阻力;
13、控制器发送信号到电比例溢流阀,根据调节压力p调节制动压力。
14、一种轮胎式液压挖掘机制动稳定性控制系统,包括姿态传感器、控制器和电比例溢流阀;
15、姿态传感器用于实时采集制动过程中的车辆倾角α和车辆实际加速度a;
16、控制器接收姿态传感器采集的车辆倾角α和车辆实际加速度a,判定车辆状态,当车辆制动且姿态达到阈值时,控制电比例溢流阀回油进行泄压。
17、一种电子设备,包括处理器以及存储器,存储器存储有计算机介质,计算机介质由处理器执行时,运行前述任一项的控制方法。
18、一种计算机介质,计算机介质上存储有计算机程序,计算机程序被处理器运行时执行前述任一项的控制方法。
19、本发明所达到的有益效果:
20、行驶制动时,可根据车辆姿态控制车辆制动加速度,降低制动压力,在保证制动距离最小的情况下避免车辆后轮离地,提升车辆制动稳定性,减少冲击和倾翻风险
技术特征:
1.一种轮胎液压挖掘机制动稳定性控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的轮胎液压挖掘机制动稳定性控制方法,其特征在于,所述倾角修订值k的计算式为:
3.根据权利要求1所述的轮胎液压挖掘机制动稳定性控制方法,其特征在于,所述若a>k,则控制电比例溢流阀调节制动压力的步骤包括:
4.一种轮胎液压挖掘机制动稳定性控制系统,其特征在于,包括姿态传感器(10)、控制器(11)和电比例溢流阀(12);
5.一种电子设备,其特征在于,包括处理器以及存储器,所述存储器存储有计算机介质,所述计算机介质由所述处理器执行时,运行如权利要求1至3任一项所述的控制方法。
6.一种计算机介质,其特征在于,所述计算机介质上存储有计算机程序,所述计算机程序被处理器运行时执行如权利要求1至3任一项所述的控制方法。
技术总结
本发明公开了轮胎液压挖掘机制动稳定性控制方法、系统、设备及介质,其中方法步骤包括,基于制动过程中实时采集的车辆倾角,计算倾角修订值k,车辆倾角由姿态传感器采集得到,基于k和制动过程中实时采集的车辆实际加速度a,判定车辆状态,并执行相应操作:若a>k,则控制电比例溢流阀调节制动压力,若a≤k且a≠0,则重新采集新的车辆倾角,并重新计算倾角修订值k;若a=0,则执行结束。
技术研发人员:李闯,王飞,居世昊,邹佳运,解朝蓬
受保护的技术使用者:徐州徐工挖掘机械有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!