一种车辆控制方法、设备及系统与流程
本申请涉及车辆控制领域,尤其涉及一种车辆控制方法、设备及系统。
背景技术:
1、随着汽车保有量不断增加,停车位变得越来越紧缺。在停车位不足需要紧急停车时,可能会导致停车不规范的情况,例如:对其他车辆的通路造成遮挡,这种情况下,若需要进行挪车,就需要驾驶员返回停车位置进行挪车,而这就会导致驾驶员时间的浪费。
技术实现思路
1、有鉴于此,本申请提供一种车辆控制方法、设备及系统,其具体方案如下:
2、一种车辆控制方法,包括:
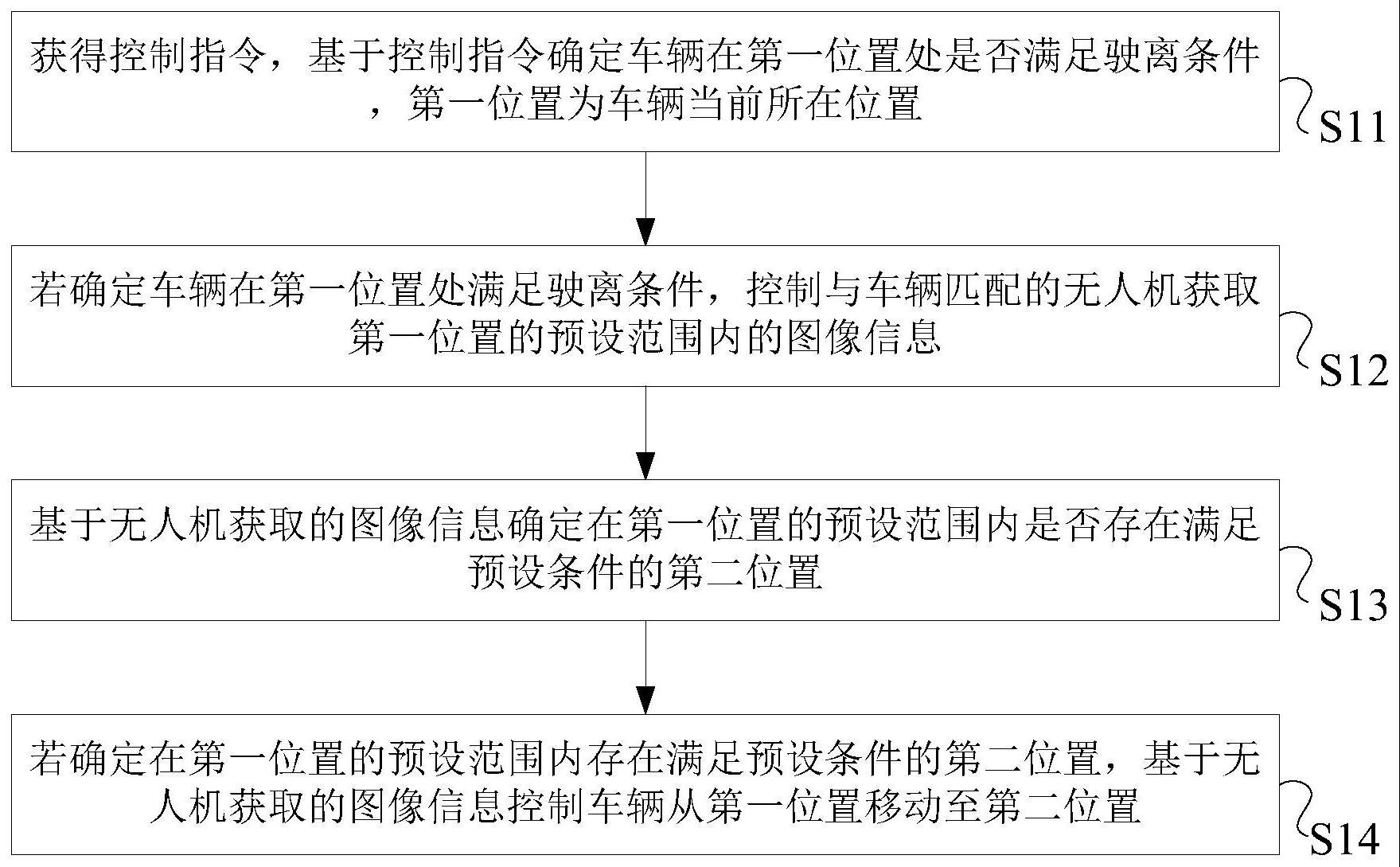
3、获得控制指令,基于所述控制指令确定车辆在第一位置处是否满足驶离条件,所述第一位置为所述车辆当前所在位置;
4、若确定所述车辆在第一位置处满足驶离条件,控制与所述车辆匹配的无人机获取所述第一位置的预设范围内的图像信息;
5、基于所述无人机获取的图像信息确定在所述第一位置的预设范围内是否存在满足预设条件的第二位置;
6、若确定在所述第一位置的预设范围内存在满足预设条件的第二位置,基于所述无人机获取的图像信息控制所述车辆从所述第一位置移动至所述第二位置。
7、进一步的,所述基于所述控制指令确定车辆在第一位置处是否满足驶离条件,包括:
8、基于所述控制指令控制所述车辆上的传感器启动,通过所述传感器检测所述车辆所在第一位置处的环境信息;
9、基于所述环境信息确定所述车辆是否具备从所述第一位置处驶离的驶离条件。
10、进一步的,所述控制与所述车辆匹配的无人机获取所述第一位置的预设范围内的图像信息,包括:
11、输出第一控制指令,控制与所述车辆匹配的无人机获取所述第一位置的预设范围内的环境图像信息;
12、或,
13、输出第二控制指令,控制与所述车辆匹配的无人机获取所述第一位置的预设范围内的空闲位置的图像信息。
14、进一步的,所述基于所述无人机获取的图像信息确定在所述第一位置的预设范围内是否存在满足预设条件的第二位置,包括:
15、基于所述无人机获取的图像信息确定在所述第一位置的预设范围内是否存在所述车辆能够从所述第一位置移动到达的、占地空间达到特定阈值的第二位置。
16、进一步的,所述基于所述无人机获取的图像信息确定在所述第一位置的预设范围内是否存在所述车辆能够从所述第一位置移动到达的、占地空间达到特定阈值的第二位置,包括:
17、基于所述无人机获取的图像信息确定在所述第一位置的预设范围内是否存在所述车辆能够从所述第一位置移动到达的空闲车位,所述空闲车位的占地空间达到特定阈值;
18、若确定在所述第一位置的预设范围内不存在所述车辆能够从所述第一位置移动到达的空闲车位,则确定在所述第一位置的预设范围内是否存在所述车辆能够从所述第一位置移动到达的错车位置,若存在,则确定所述错车位置为第二位置,所述错车位置的占地空间达到特定阈值。
19、进一步的,所述若确定在所述第一位置的预设范围内存在满足预设条件的第二位置,基于所述无人机获取的图像信息控制所述车辆从所述第一位置移动至所述第二位置,包括:
20、若确定在所述第一位置的预设范围内存在满足预设条件的第二位置,输出第三控制指令,基于所述第三控制指令控制所述无人机与所述车辆同步移动;
21、获取所述无人机与所述车辆同步移动时采集的图像信息,基于所述无人机与所述车辆同步移动时采集的图像信息控制所述车辆移动至所述第二位置。
22、进一步的,所述若确定在所述第一位置的预设范围内存在满足预设条件的第二位置,基于所述无人机获取的图像信息控制所述车辆从所述第一位置移动至所述第二位置,包括:
23、若确定在所述第一位置的预设范围内存在满足预设条件的第二位置,获得所述第一位置至所述第二位置的路径信息,控制所述车辆基于所述路径信息向所述第二位置移动;
24、若基于所述无人机获取的图像信息及所述路径信息确定当前存在障碍物,在满足条件时,控制所述车辆返回至所述第一位置。
25、进一步的,还包括:
26、若确定所述车辆移动至所述第二位置,输出所述第二位置至与所述车辆关联的账户。
27、一种车辆控制设备,包括:
28、处理器,用于获得控制指令,基于所述控制指令确定车辆在第一位置处是否满足驶离条件,所述第一位置为所述车辆当前所在位置;若确定所述车辆在第一位置处满足驶离条件,控制与所述车辆匹配的无人机获取所述第一位置的预设范围内的图像信息;基于所述无人机获取的图像信息确定在所述第一位置的预设范围内是否存在满足预设条件的第二位置;若确定在所述第一位置的预设范围内存在满足预设条件的第二位置,基于所述无人机获取的图像信息控制所述车辆从所述第一位置移动至所述第二位置;
29、存储器,用于存储所述处理器执行上述处理流程的程序。
30、一种车辆控制系统,包括:
31、无人机,与车辆匹配,能够获取所述车辆所在的第一位置的预设范围内的图像信息;
32、车辆控制设备,用于获得控制指令,基于所述控制指令确定车辆在第一位置处是否满足驶离条件,所述第一位置为所述车辆当前所在位置;若确定所述车辆在第一位置处满足驶离条件,控制与所述车辆匹配的无人机获取所述第一位置的预设范围内的图像信息;基于所述无人机获取的图像信息确定在所述第一位置的预设范围内是否存在满足预设条件的第二位置;若确定在所述第一位置的预设范围内存在满足预设条件的第二位置,基于所述无人机获取的图像信息控制所述车辆从所述第一位置移动至所述第二位置。
33、从上述技术方案可以看出,本申请公开的车辆控制方法、设备及系统,获得控制指令,基于控制指令确定车辆在第一位置处是否满足驶离条件,第一位置为车辆当前所在位置;若确定车辆在第一位置处满足驶离条件,控制与车辆匹配的无人机获取第一位置的预设范围内的图像信息;基于无人机获取的图像信息确定在第一位置的预设范围内是否存在满足预设条件的第二位置;若确定在第一位置的预设范围内存在满足预设条件的第二位置,基于无人机获取的图像信息控制车辆从第一位置移动至第二位置。本方案在获得控制指令时,首先判断车辆所在位置处是否满足驶离条件,只有在满足驶离条件时,才会控制无人机获取预设范围内的图像信息,以便确定是否存在满足预设条件的第二位置,并在存在第二位置时,自动控制车辆移动至第二位置,实现了基于无人机确定位置并控制车辆移动至相应位置的目的,无需驾驶员驾驶车辆即可实现车辆的移动,避免了驾驶员时间的浪费,提高了用户体验。
技术特征:
1.一种车辆控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述控制指令确定车辆在第一位置处是否满足驶离条件,包括:
3.根据权利要求1所述的方法,其特征在于,所述控制与所述车辆匹配的无人机获取所述第一位置的预设范围内的图像信息,包括:
4.根据权利要求1所述的方法,其特征在于,所述基于所述无人机获取的图像信息确定在所述第一位置的预设范围内是否存在满足预设条件的第二位置,包括:
5.根据权利要求4所述的方法,其特征在于,所述基于所述无人机获取的图像信息确定在所述第一位置的预设范围内是否存在所述车辆能够从所述第一位置移动到达的、占地空间达到特定阈值的第二位置,包括:
6.根据权利要求1所述的方法,其特征在于,所述若确定在所述第一位置的预设范围内存在满足预设条件的第二位置,基于所述无人机获取的图像信息控制所述车辆从所述第一位置移动至所述第二位置,包括:
7.根据权利要求1所述的方法,其特征在于,所述若确定在所述第一位置的预设范围内存在满足预设条件的第二位置,基于所述无人机获取的图像信息控制所述车辆从所述第一位置移动至所述第二位置,包括:
8.根据权利要求1所述的方法,其特征在于,还包括:
9.一种车辆控制设备,其特征在于,包括:
10.一种车辆控制系统,其特征在于,包括:
技术总结
本申请公开了一种车辆控制方法、设备及系统,获得控制指令,基于控制指令确定车辆在第一位置处是否满足驶离条件,第一位置为车辆当前所在位置;若确定车辆在第一位置处满足驶离条件,控制与车辆匹配的无人机获取第一位置的预设范围内的图像信息;基于无人机获取的图像信息确定在第一位置的预设范围内是否存在满足预设条件的第二位置;若确定在第一位置的预设范围内存在满足预设条件的第二位置,基于无人机获取的图像信息控制车辆从第一位置移动至第二位置。
技术研发人员:杨洪智,马路路,陈聪,冯晓宇,赵永坡
受保护的技术使用者:长城汽车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!