一种远光灯驱动系统、方法、电子设备及存储介质与流程
本发明涉及车辆照明控制,提供了一种远光灯驱动系统、方法、电子设备及存储介质。
背景技术:
1、据统计,大约40%的事故都是发生在晚上。而汽车前大灯的最大用途便是为驾驶员提供良好的路面照明效果,汽车前大灯的重要性不言而喻,汽车照明技术也因此备受瞩目。然而,在汽车前大灯的实际使用过程中,当车辆行驶环境的照明条件较差,比如夜晚、雾霾及阴雨天等情况下,很多用户为了得到更好的路面照明效果,往往打开远光灯或者频繁切换远近光灯。远光灯打开后,很容易造成对向行驶车辆驾驶员眼睛的炫目。
2、adb大灯的主要作用是提高夜间行车的安全性,它可以根据路况自动切换远光灯和近光灯,避免对来车造成眩光。相比于传统的led大灯,adb大灯具有更高的安全性和舒适性,已经被广泛应用于各种车型中。使用adb大灯需要考虑的主要问题还是经常所讨论和关心的安全和眩光等问题。其中,安全性方面光型越丰富,那安全性就会越高,如何通过识别尽可能的根据驾驶环境来调节灯光,以此避免造成对向行驶车辆驾驶员眼睛的炫目,同时减少驾驶员需切换远近光分散注意力的情况是目前需要克服的问题。
技术实现思路
1、为了解决背景技术中提到的至少一个技术问题,本发明的目的在于提供一种远光灯驱动系统、方法、电子设备及存储介质,以避免对其他道路来向车辆的驾驶员产生炫目,提高交通安全性。
2、为实现上述目的,本发明提供如下技术方案:
3、一种远光灯驱动系统,包括信息采集输入模块:用于采集目标车辆相对于自身车辆的位置图像信息;
4、处理计算模块:用于根据位置图像信息判断目标车辆是否进入光型照射范围内,并输出对应的控制指令;
5、分析模块:用于根据位置图像信息判断目标车辆是否进入光型照射范围内,并输出对应的控制指令;
6、所述分析模块包括:
7、第一判断指令输出单元:当判断目标车辆进入光型照射范围内时,则根据位置图像信息中光型的阴影部分的动态运动方向依次输出控制对应光型阴影范围内led灯珠处于熄灭状态的控制指令;
8、第二判断指令输出单元:当判断目标车辆未进入光型照射范围内时,则继续对下一组位置图像信息中目标车辆是否进入光型照射范围内进行判断;
9、led灯组控制模块:用于根据分析模块输出的控制指令控制led灯组的熄灭状态。
10、进一步地,所述信息采集输入模块包括:
11、第一采集单元:用于对目标车辆按照第一预设时间间隔记录与自身车辆之间的距离;
12、第二采集单元:用于采集自身车辆当前的行驶速度。
13、进一步地,所述信息采集输入模块还包括:
14、处理计算单元:用于对目标车辆与自身车辆的距离和自身车辆当前的行驶速度进行计算得到会车时间,根据会车时间调整信息采集输入模块的采集频率,对目标车辆按照第二预设时间间隔记录相对于自身车辆的位置图像信息;
15、其中,所述第一预设时间间隔大于所述第二预设时间间隔。
16、进一步地,所述分析模块还包括:
17、第一车速检测单元:当检测到自身车辆当前的行驶速度大于60km/h时,将输出控制远光灯开启的控制指令;
18、第二车速检测单元:当检测到自身车辆当前的行驶速度小于40km/h时,将分别输出控制远光灯关闭和控制近光灯开启的控制指令。
19、一种远光灯驱动方法,包括步骤:
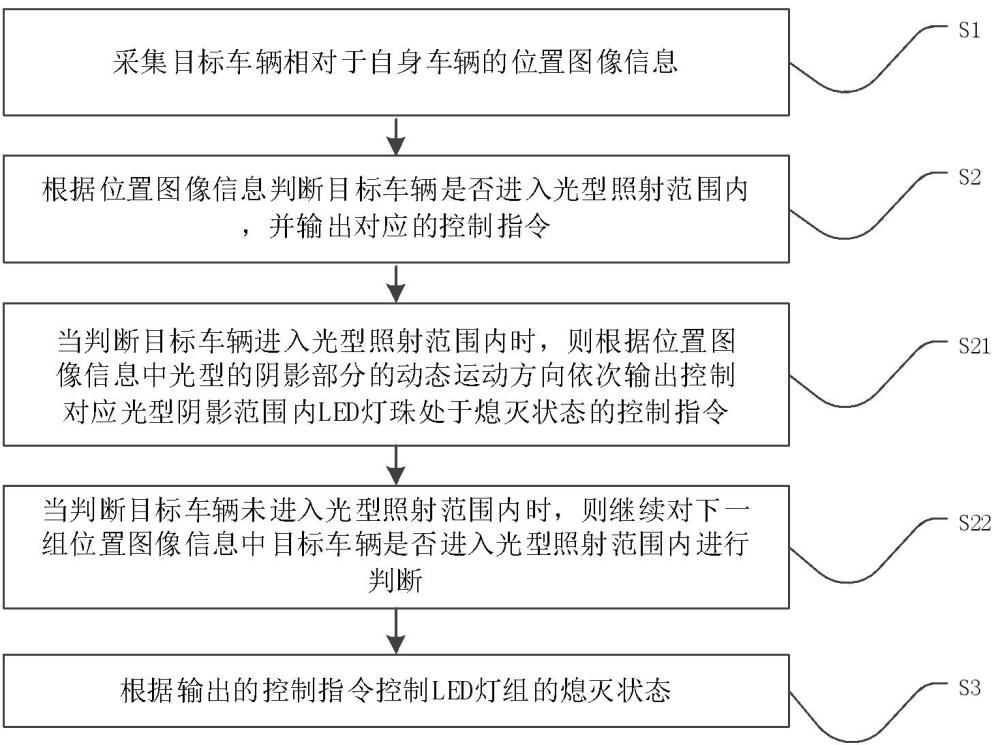
20、s1:采集目标车辆相对于自身车辆的位置图像信息;
21、s2:根据位置图像信息判断目标车辆是否进入光型照射范围内,并输出对应的控制指令;
22、所述步骤s2包括:
23、s21:当判断目标车辆进入光型照射范围内时,则根据位置图像信息中光型的阴影部分的动态运动方向依次输出控制对应光型阴影范围内led灯珠处于熄灭状态的控制指令;
24、s22:当判断目标车辆未进入光型照射范围内时,则继续对下一组位置图像信息中目标车辆是否进入光型照射范围内进行判断;
25、s3:根据输出的控制指令控制led灯组的熄灭状态。
26、进一步地,所述步骤s1包括:
27、s11:对目标车辆按照第一预设时间间隔记录与自身车辆之间的距离;
28、s12:采集自身车辆当前的行驶速度;
29、s13:对目标车辆与自身车辆的距离和自身车辆当前的行驶速度进行计算得到会车时间,根据会车时间调整信息采集输入模块的采集频率,对目标车辆按照第二预设时间间隔记录相对于自身车辆的位置图像信息。
30、进一步地,所述步骤s2还包括:
31、s23:当检测到自身车辆当前的行驶速度大于60km/h时,将输出控制远光灯开启的控制指令;
32、s24:当检测到自身车辆当前的行驶速度小于40km/h时,将分别输出控制远光灯关闭和控制近光灯开启的控制指令。
33、一种电子设备,所述电子设备包括:
34、存储器:用于存储可执行指令;
35、处理器:用于运行所述存储器存储的可执行指令时,实现上述方案中任一项所述的远光灯驱动方法。
36、一种计算机可读存储介质,存储有可执行指令,所述可执行指令被处理器执行时实现上述方案中任一项所述的远光灯驱动方法。
37、与现有技术相比,本发明的有益效果是:
38、本发明通过远光灯驱动系统对信息采集输入模块采集到的信息进行实时图像化处理,经过处理计算模块处理得到来向的目标车辆相对于自身车辆的位置图像信息。根据位置图像信息判断来向车辆是否进入光型照射范围内,当判断目标车辆进入光型照射范围内时,则根据位置图像信息中光型的阴影部分的动态运动方向依次输出控制对应光型阴影范围内led灯珠工作状态的控制指令。进而在来向车辆进入光型照射范围内时提前关闭该范围内的led灯,防止远光灯直接照射来向车辆的驾驶员对其造成炫目。在进行跟车、会车和经过各种交通标志时,远光灯驱动系统可以驱动adb大灯调整灯光光型,以提供符合照明情景的光型,避免对其他道路使用者造成炫目。
技术特征:
1.一种远光灯驱动系统,其特征在于,包括:
2.根据权利要求1所述的远光灯驱动系统,其特征在于,所述信息采集输入模块包括:
3.根据权利要求2所述的远光灯驱动系统,其特征在于,所述信息采集输入模块还包括:
4.根据权利要求1所述的远光灯驱动系统,其特征在于,所述分析模块还包括:
5.一种远光灯驱动方法,其特征在于,包括步骤:
6.根据权利要求5所述的远光灯驱动方法,其特征在于,所述步骤s1包括:
7.根据权利要求5所述的远光灯驱动方法,其特征在于,所述步骤s2还包括:
8.一种电子设备,其特征在于,所述电子设备包括:
9.一种计算机可读存储介质,存储有可执行指令,其特征在于,所述可执行指令被处理器执行时实现权利要求5至7任一项所述的远光灯驱动方法。
技术总结
本发明公开了一种远光灯驱动系统、方法、电子设备及存储介质,涉及领域车辆照明控制技术领域,包括信息采集输入模块:用于采集目标车辆相对于自身车辆的位置图像信息;分析模块:用于根据位置图像信息判断目标车辆是否进入光型照射范围内,并输出对应的控制指令;所述分析模块包括:第一判断指令输出单元:当判断目标车辆进入光型照射范围内时,则根据位置图像信息中光型的阴影部分的动态运动方向依次输出控制对应光型阴影范围内LED灯珠处于熄灭状态的控制指令。本发明能够避免对其他道路来向车辆的驾驶员产生炫目,进而提高交通安全性。
技术研发人员:马振波,王书仓
受保护的技术使用者:浙江嘀视科技有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!