一种车辆紧急避障控制方法及系统与流程
本发明涉及汽车智能控制,特别是涉及一种车辆紧急避障控制方法及系统。
背景技术:
1、本部分的陈述仅仅是提到了与本发明相关的背景技术,并不必然构成现有技术。
2、随着汽车工业发展,汽车已经成为我们生活中的必需品,汽车辅助驾驶技术也日益趋于成熟,如何的安全避撞对于汽车来说至关重要。
3、在出现紧急交通状态时,基于车载雷达和摄像头的紧急避撞系统可以自行判断行车环境,避免碰撞,降低事故发生率,满足人们对于车辆的安全要求。
4、当下自动紧急制动系统aeb和自动紧急转向系统aes已经在汽车上广泛应用:是各个车企已经实现的功能。
5、自动紧急制动系统aeb,通常是根据车载雷达和摄像头反馈的汽车前方障碍物的距离和状态,判断是否有碰撞危险,如果有则自动控制汽车制动,避免与前方障碍物进行碰撞。
6、自动紧急转向系统aes,主要是通过车载传感器采集自车的行车环境和自车的行驶状态,自动规划合理的转向避撞路径。
7、基于这两个基本的功能可以实现许多复杂功能。aeb和aes基本上是会同时触发的两个功能,目前业内量产项目基本将aeb和aes作为两个互斥的功能,且并不关注后方来车追尾的情况。
技术实现思路
1、为了解决现有技术的不足,本发明提供了一种车辆紧急避障控制方法及系统;本发明将aeb和aes结合并且关注后方来车情况,车辆启动后就会开始运行安全避撞系统,系统会通过车载雷达、摄像头监测车辆前后左右的车辆及障碍物,自行判断在行驶过程中是否存在碰撞风险,并控制车辆进行安全避撞。
2、一方面,提供了一种车辆紧急避障控制方法,包括:
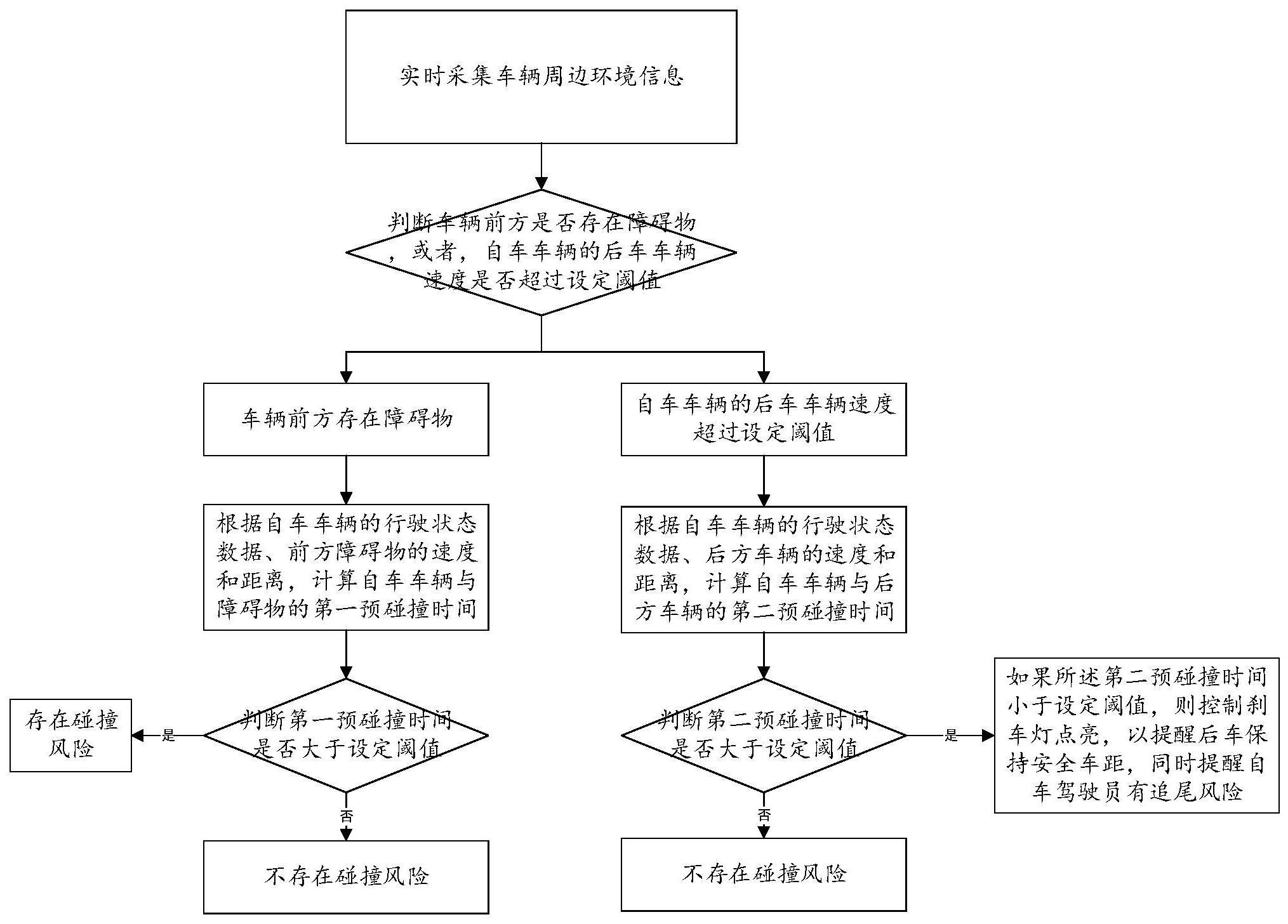
3、实时采集车辆周边环境信息;
4、根据车辆周边环境信息,判断车辆前方是否存在障碍物,或者,自车车辆的后车车辆速度是否超过设定阈值,如果车辆前方存在障碍物,则根据自车车辆的行驶状态数据、前方障碍物的速度和距离,计算自车车辆与障碍物的第一预碰撞时间;判断所述第一预碰撞时间是否大于设定阈值,如果是,则表示不存在碰撞风险,如果否,则表示存在碰撞风险;
5、如果自车车辆的后车车辆速度超过设定阈值,则根据自车车辆的行驶状态数据、后方车辆的速度和距离,计算自车车辆与后方车辆的第二预碰撞时间,如果所述第二预碰撞时间小于设定阈值,则控制刹车灯点亮,以提醒后车保持安全车距,同时提醒自车驾驶员有追尾风险。
6、另一方面,提供了一种车辆紧急避障控制系统,包括:车辆控制器;所述车辆控制器,被配置为:
7、实时采集车辆周边环境信息;
8、根据车辆周边环境信息,判断车辆前方是否存在障碍物,或者,自车车辆的后车车辆速度是否超过设定阈值;
9、如果车辆前方存在障碍物,则根据自车车辆的行驶状态数据、前方障碍物的速度和距离,计算自车车辆与障碍物的第一预碰撞时间;判断所述第一预碰撞时间是否大于设定阈值,如果是,则表示不存在碰撞风险,如果否,则表示存在碰撞风险;
10、如果自车车辆的后车车辆速度超过设定阈值,则根据自车车辆的行驶状态数据、后方车辆的速度和距离,计算自车车辆与后方车辆的第二预碰撞时间,如果所述第二预碰撞时间小于设定阈值,则控制刹车灯点亮,以提醒后车保持安全车距,同时提醒自车驾驶员有追尾风险。
11、上述技术方案中的一个技术方案具有如下优点或有益效果:
12、本发明可以实现自车车辆遇到前方障碍物或后方快速行驶车辆时,辅助驾驶员实现自车车辆的安全避障、快速避障和精准避障。
技术特征:
1.一种车辆紧急避障控制方法,其特征是,包括:
2.如权利要求1所述的一种车辆紧急避障控制方法,其特征是,实时采集车辆周边环境信息,包括:
3.如权利要求1所述的一种车辆紧急避障控制方法,其特征是,所述根据自车车辆的行驶状态数据、前方障碍物的速度和距离,计算自车车辆与障碍物的第一预碰撞时间,具体包括:
4.如权利要求1所述的一种车辆紧急避障控制方法,其特征是,根据自车车辆的行驶状态数据、前方障碍物的速度和距离,计算自车车辆与障碍物的第一预碰撞时间;判断所述第一预碰撞时间是否大于设定阈值,如果是,则表示不存在碰撞风险,如果否,则表示存在碰撞风险;
5.如权利要求1所述的一种车辆紧急避障控制方法,其特征是,根据自车车辆的行驶状态数据、前方障碍物的速度和距离,计算自车车辆与障碍物的第一预碰撞时间;判断所述第一预碰撞时间是否大于设定阈值,如果是,则表示不存在碰撞风险,如果否,则表示存在碰撞风险;
6.如权利要求1所述的一种车辆紧急避障控制方法,其特征是,根据自车车辆的行驶状态数据、后方车辆的速度和距离,计算自车车辆与后方车辆的第二预碰撞时间,具体包括:
7.如权利要求1所述的一种车辆紧急避障控制方法,其特征是,还包括:持续监测自车车辆与后方车辆之间的距离;
8.如权利要求1所述的一种车辆紧急避障控制方法,其特征是,还包括:持续监测自车车辆与后方车辆之间的距离;
9.一种车辆紧急避障控制系统,其特征是,包括:车辆控制器;所述车辆控制器,被配置为:
10.如权利要求9所述的一种车辆紧急避障控制系统,其特征是,所述系统还包括:与所述车辆控制器连接的周边环境信息采集装置,所述周边环境信息采集装置实时监测车辆周边的车辆、行人和道路状况,将信息传递给所述车辆控制器,所述车辆控制器对微波雷达以及摄像头传输回的周边环境信息及车辆其他传感器传回的车辆运行状态一同进行处理,并分析当前的行车环境,通过can总线发出指令控制车辆。
技术总结
本发明公开了一种车辆紧急避障控制方法及系统,方法包括根据车辆周边环境信息,判断车辆前方是否存在障碍物,或,自车车辆的后车车辆速度是否超过设定阈值;如果车辆前方存在障碍物,则根据自车车辆的行驶状态数据、前方障碍物的速度和距离,计算自车车辆与障碍物的第一预碰撞时间;判断所述第一预碰撞时间是否大于设定阈值,如果是,则表示不存在碰撞风险,如果否,则表示存在碰撞风险;如果自车车辆的后车车辆速度超过设定阈值,则根据自车车辆的行驶状态数据、后方车辆的速度和距离,计算自车车辆与后方车辆的第二预碰撞时间,如果所述第二预碰撞时间小于设定阈值,则控制刹车灯点亮,以提醒后车保持安全车距,提醒自车驾驶员有追尾风险。
技术研发人员:陈娟,崔晓宇,周倪青,姜灏,孟泽,李坤鹏,王翰林
受保护的技术使用者:奇瑞汽车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!