一种车辆自动泊出方法及系统与流程
本发明属于泊车,具体涉及一种车辆自动泊出方法及系统。
背景技术:
1、随着汽车自动驾驶技术的发展和人们生活水平的提高,用户对泊车功能的用途和需求的等级要求相应变高。泊车功能按照使用场景分泊入功能和泊出功能,泊出功能相较于泊入功能所面临的泊车环境更复杂。
2、现有技术中的主流方案包括,一,汽车从原自动泊入路径的泊出,碰撞风险较低,相对安全,但是使用场景单一,不能满足用户的需求,当采用非自动泊入的场景无法实现泊出功能。二,依靠超声波雷达实时检测障碍物进行泊出,该方案使用场景丰富,但是由于近距离超声波盲区较大,存在泊出时由于没有检测到障碍物而出现剐蹭风险。
3、因此,现有技术中亟需一种适合多场景的安全泊出汽车的技术方案。
技术实现思路
1、鉴于以上所述的现有技术的缺点,本发明的目的是提供一种车辆自动泊出方法,解决了车辆自动安全泊出的问题。
2、为实现上述目的,本发明采用如下技术方案:
3、本发明第一方面提供一种车辆自动泊出方法,包括:
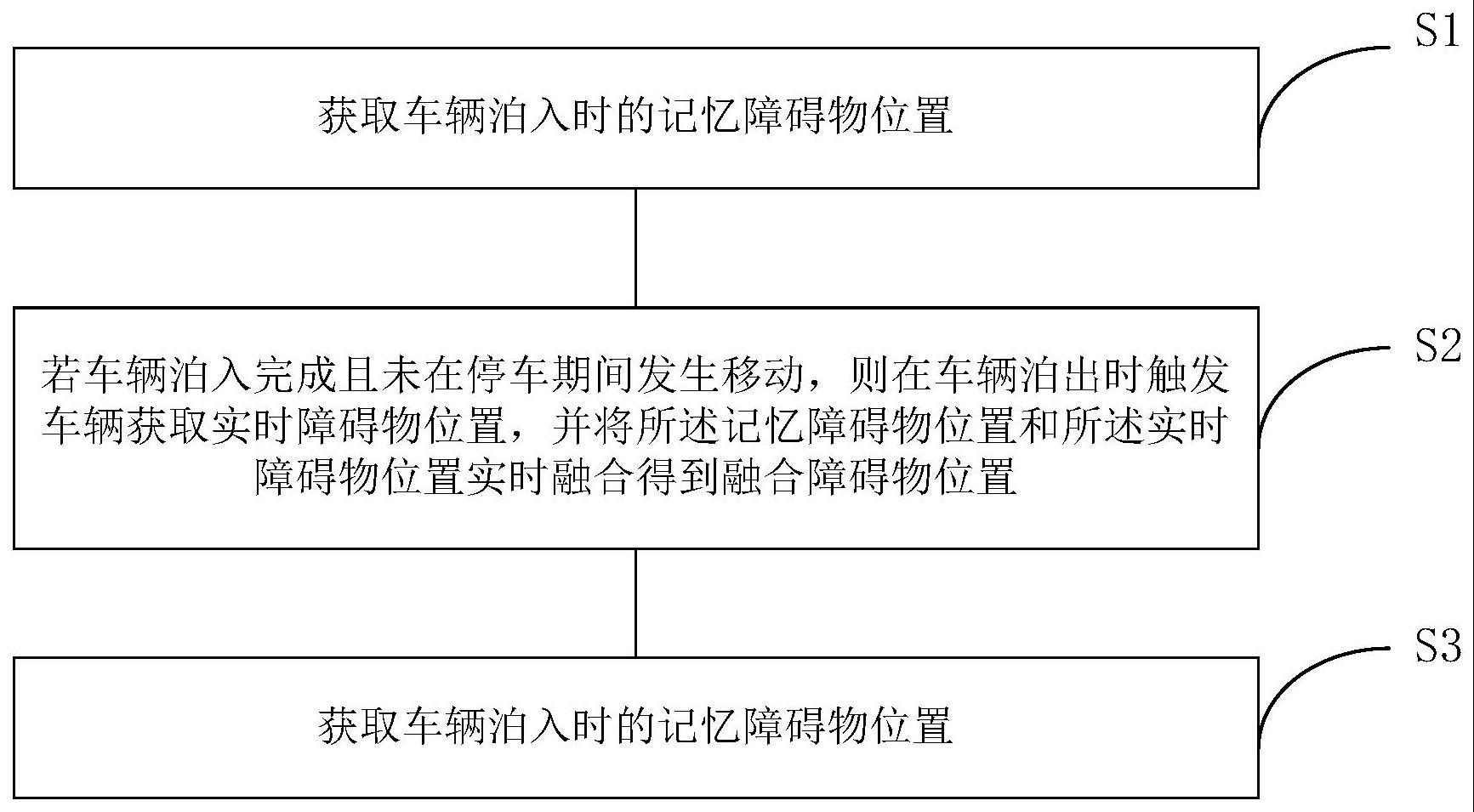
4、获取车辆泊入时的记忆障碍物位置;
5、若车辆泊入完成且未在停车期间发生移动,则在车辆泊出时触发车辆获取实时障碍物位置,并将所述记忆障碍物位置和所述实时障碍物位置实时融合得到融合障碍物位置;
6、基于所述融合障碍物位置生成车辆可泊轨迹以用于车辆自动泊出。
7、作为本发明的一种实施方式,所述获取车辆泊入时的记忆障碍物位置,包括:
8、获取车辆泊入时的车速,若车辆泊入时的车速低于预设泊入车速阈值,激活车辆进行环境感知和位置记忆;
9、车辆在进行环境感知和位置记忆后生成预设距离阈值内的障碍物地图;
10、基于障碍物属性和障碍物位置对所述障碍物地图进行拆分得到记忆障碍物地图,所述记忆障碍物地图中包含记忆障碍物位置。
11、作为本发明的一种实施方式,所述基于障碍物属性和障碍物位置对所述障碍物地图进行拆分得到记忆障碍物地图包括:
12、利用相机区分障碍物属性,所述障碍物属性包括固定属性和可移动属性;
13、利用雷达确定障碍物位置;
14、基于所述固定属性和所述障碍物位置对所述障碍物地图进行拆分得到记忆障碍物地图,所述记忆障碍物地图中包含的记忆障碍物位置为具有固定属性的障碍物位置。
15、作为本发明的一种实施方式,所述基于所述融合障碍物位置生成车辆可泊轨迹,包括:
16、获取车辆泊入时的车位类型和泊入轨迹点;
17、基于所述车位类型和所述泊入轨迹点获取车辆拟泊出轨迹;
18、基于所述车辆拟泊出轨迹和所述融合障碍物位置生成车辆可泊轨迹。
19、作为本发明的一种实施方式,基于挡位变化和车速的变化判断车辆是否在车辆泊入完成的停车期间发生移动。
20、作为本发明的一种实施方式,在所述基于所述融合障碍物位置生成车辆可泊轨迹以用于车辆自动泊出之前,包括:
21、对泊出功能的开启条件进行判断,并在满足所述开启条件时,允许驾驶员开启泊车功能,其中,所述开启条件包括:泊车系统无故障、关联系统无故障、车门未打开和/或未有人工干预。
22、本申请第二方面提供一种车辆自动泊出系统,包括:
23、获取模块,用于获取车辆泊入时的记忆障碍物位置;
24、融合模块,用于泊入时不同传感器感知融合以及车辆泊入完成且未在停车期间发生移动,则在车辆泊出时触发车辆获取实时障碍物位置,并将所述记忆障碍物位置和所述实时障碍物位置实时融合得到融合障碍物位置;
25、生成模块,用于基于所述融合障碍物位置生成车辆可泊轨迹以用于车辆自动泊出。
26、作为本发明的一种实施方式,还包括执行模块,所述执行模块用于控制执行器基于所述车辆可泊轨迹进行泊出并完成。
27、作为本发明的一种实施方式,所述获取模块包括记忆障碍物地图获取模块,所述记忆障碍物地图获取模块用于获取车辆泊入时的车速,若车辆泊入时的车速低于预设泊入车速阈值,激活车辆进行环境感知和位置记忆;
28、车辆在进行环境感知和位置记忆后生成预设距离阈值内的障碍物地图;
29、基于障碍物属性和障碍物位置对所述障碍物地图进行拆分得到记忆障碍物地图,所述记忆障碍物地图中包含记忆障碍物位置。
30、本申请第三方面提供一种可读存储介质,所述可读存储介质存储有计算机指令,所述计算机指令被处理器执行时实现如本申请第一方面提供的车辆自动泊出方法。
31、综上所述,与现有技术相比,本发明包括以下至少一种有益技术效果:
32、1.本申请将记忆障碍物和实时障碍物融合进行安全泊出,可以将近距离盲区内的障碍物有效探测到,既可以降低碰撞风险,不增加额外成本,也可以适合多场景泊车,改善单一场景泊车的局限性;
33、2.本申请设置泊出功能的开启条件,可以当车辆满足泊出功能的开启条件后,驾驶员开启泊出功能,泊车系统基于所述融合障碍物位置生成车辆可泊轨迹以用于车辆自动泊出,通过该方式可以获得车辆可泊轨迹点生成时刻,避免多生、误生和错生轨迹点等情况的发生。
技术特征:
1.一种车辆自动泊出方法,其特征在于,包括:
2.根据权利要求1所述的车辆自动泊出方法,其特征在于,所述获取车辆泊入时的记忆障碍物位置,包括:
3.根据权利要求2所述的车辆自动泊出方法,其特征在于,所述基于障碍物属性和障碍物位置对所述障碍物地图进行拆分得到记忆障碍物地图包括:
4.根据权利要求1所述的车辆自动泊出方法,其特征在于,所述基于所述融合障碍物位置生成车辆可泊轨迹,包括:
5.根据权利要求1所述的车辆自动泊出方法,其特征在于,基于挡位变化和车速的变化判断车辆是否在车辆泊入完成的停车期间发生移动。
6.根据权利要求1所述的车辆自动泊出方法,其特征在于,在所述基于所述融合障碍物位置生成车辆可泊轨迹以用于车辆自动泊出之前,包括:
7.一种车辆自动泊出系统,其特征在于,包括:
8.根据权利要求7所述的车辆自动泊出系统,其特征在于,还包括执行模块,所述执行模块用于控制执行器基于所述车辆可泊轨迹进行泊出并完成。
9.根据权利要求7所述的车辆自动泊出系统,其特征在于,所述获取模块包括记忆障碍物地图获取模块,所述记忆障碍物地图获取模块用于获取车辆泊入时的车速,若车辆泊入时的车速低于预设泊入车速阈值,激活车辆进行环境感知和位置记忆;
10.一种可读存储介质,其特征在于,所述可读存储介质存储有计算机指令,所述计算机指令被处理器执行时实现如权利要求1-6中任一项所述的一种车辆自动泊出方法。
技术总结
本申请提供一种车辆自动泊出方法及系统,所述车辆自动泊出方法包括:获取车辆泊入时的记忆障碍物位置;若车辆泊入完成且未在停车期间发生移动,则在车辆自动泊出时触发车辆获取实时障碍物位置,并将所述记忆障碍物位置和所述实时障碍物位置实时融合得到融合障碍物位置;基于所述融合障碍物位置生成车辆可泊轨迹以用于车辆自动泊出。本申请将记忆障碍物和实时障碍物融合进行安全泊出,可以将近距离盲区内的障碍物全部探测到,既可以降低碰撞风险,不增加额外成本,也可以适合多场景泊车,改善单一场景泊车的局限性。
技术研发人员:连桂有,贺锦鹏,杨毅,付守财,马磊
受保护的技术使用者:智己汽车科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!