减少电动汽车前窜的控制方法、控制系统、设备及介质与流程
本申请涉及新能源汽车,具体涉及一种减少电动汽车前窜的控制方法、控制系统、设备及介质。
背景技术:
1、为提高电动汽车续航里程,单踏板模式愈加普及,其特点在于利用驱动电机提供较大制动扭矩进行能量回收并实现车辆减速。单踏板模式能够让驾驶员只通过加速踏板开度实现一定程度上的车辆减速控制,该模式下为了提高车辆续航里程而尽可能的利用电机提供负扭矩实现能量回收。
2、电动汽车还具有湿滑模式,湿滑模式的目的之一是当电动汽车行驶在冰雪、湿滑、颠簸等恶劣路面上时提供较小的滑行能量回收或者不进行能量回收,这样能保证车辆平稳的行驶在冰雪、湿滑、颠簸等恶劣路面,不会因为能量回收过大导致车辆失控。
3、在单踏板模式下,当车辆进行能量回收时,突然遇到冰雪、湿滑、颠簸等恶劣路面时,由于轮速的波动导致esc(electrionic stability control,汽车电子稳定控制系统)功能介入,此时为了保持车身姿态稳定会迅速退出电制动能量回收,在这个过程中会导致车辆突然失去能量回收导致车辆加速度突变并突然前窜,容易给驾驶员惊吓并感觉车辆刹车不牢靠的假象。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,本申请旨在提供一种减少电动汽车前窜的控制方法、控制系统、设备及介质。
2、第一方面,本申请提出一种减少电动汽车前窜的控制方法,包括如下步骤:
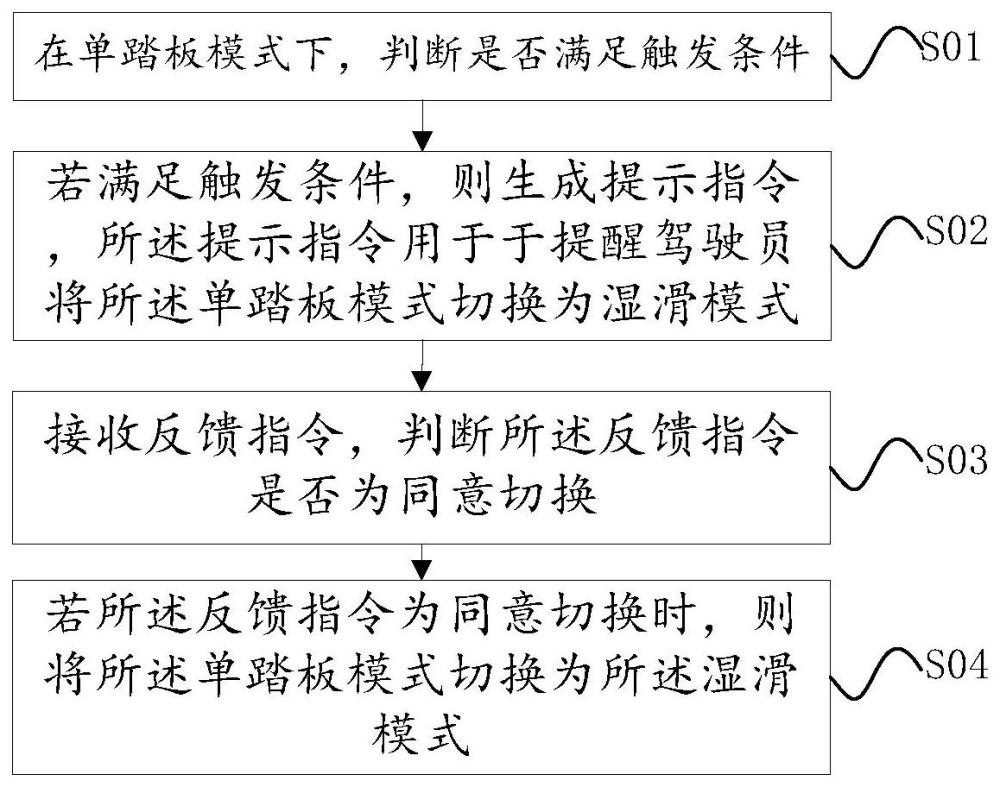
3、在单踏板模式下,判断是否满足触发条件;
4、若满足触发条件,则生成提示指令,所述提示指令用于提醒驾驶员将所述单踏板模式切换为所述湿滑模式;
5、接收反馈指令,判断所述反馈指令是否为同意切换;
6、若所述反馈指令为同意切换时,则将所述单踏板模式切换为所述湿滑模式。
7、根据本申请实施例提供的技术方案,所述触发条件为当前时间达到提示时刻,其中,确定所述提示时刻的方法包括如下步骤:
8、接收天气预报信息,所述天气预报信息至少包括预计时刻,以及与预计时刻对应的天气现象;所述天气现象包括雨天、晴天、阴天;
9、若所述天气现象为雨天,则设定此天气现象对应的预计时刻为第一预设时刻;
10、设定第一预设时长;
11、根据所述第一预设时刻与所述第一预设时长,计算得到提示时刻。
12、根据本申请实施例提供的技术方案,所述触发条件为驾驶至提示坐标,其中,确定所述提示坐标的方法包括如下步骤:
13、接收导航提供的路段信息,所述路段信息至少包括路段坐标,以及与路段坐标对应的第一路面信息;所述第一路面信息包括颠簸路、窄路、盘山;
14、若所述第一路面信息为颠簸路时,则设定该所述第一路面信息对应的所述路段坐标为第一路段坐标;
15、设定第一预设距离;
16、根据所述第一路段坐标以及所述第一预设距离计算得到提示坐标。
17、根据本申请实施例提供的技术方案,所述若所述第一路面信息为颠簸路时,则设定该所述第一路面信息对应的所述路段坐标为所述第一路段坐标,还包括如下步骤:
18、设定第一阈值;
19、计算各所述第一路面信息为颠簸路的路段长度;
20、判断各所述路段长度大于所述第一阈值时,则设定该路段对应的所述路段坐标为所述第一路段坐标。
21、根据本申请实施例提供的技术方案,所述触发条件为第二路面信息为颠簸路面或湿滑路面,其中,获得所述第二路面信息的方法还包括如下步骤:
22、采集第一图像信息,所述第一图像信息用于显示沿驾驶路线所述电动汽车前方第二预设距离的路面图像;
23、处理所述第一图像信息,得到所述电动汽车前所述第二预设距离处的第二路面信息。
24、根据本申请实施例提供的技术方案,所述触发条件为不稳定事件的次数等于不稳定阈值,确定不稳定事件的次数的方法包括如下步骤:
25、设定波动阈值和不稳定阈值;
26、响应于轮速波动信号,获取轮速波动值;
27、若所述轮速波动值大于所述波动阈值时,判定所述电动汽车发生一次不稳定事件;
28、累计获得不稳定事件的次数。
29、根据本申请实施例提供的技术方案,获取所述轮速波动值包括如下步骤;
30、获取轮胎半径、车轮转速、车速;
31、根据所述轮胎半径、所述车轮转速、所述车速计算得到所述轮速波动值。
32、第二方面,本申请提出一种减少电动汽车前窜的控制系统,包括:
33、判断模块,所述判断模块配置用于在单踏板模式下,判断是否满足触发条件;
34、生成模块,所述生成模块配置用于若满足触发条件,生成提示指令,所述提示指令用于提醒驾驶员将单踏板模式切换为湿滑模式;
35、接收模块,所述接收模块用于接收反馈指令,判断所述反馈指令是否为同意切换;
36、执行模块,所述执行模块配置用于若所述反馈指令为同意切换时,则将所述单踏板模式切换为所述湿滑模式。
37、第三方面,本申请提出一种终端设备,包括处理器和存储器,其中,所述存储器存储有计算机程序,当所述计算机程序被所述处理器执行时,使得所述处理器执行以上所述的减少电动汽车前窜的控制方法的步骤。
38、第四方面,本申请提出一种可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如上所述的减少电动汽车前窜的控制方法。
39、综上所述,本申请提出一种减少电动汽车前窜的控制方法,在单踏板模式下判断是否满足触发条件,若满足触发条件则生成提示指令,若反馈指令为同意切换时,则将单踏板模式切换为湿滑模式;使用时,电动汽车可在经过恶劣路面前通过此方法将单踏板模式切换为湿滑模式,避免了esc功能的启动,减少了车辆前窜的风险,避免车辆突发前窜问题导致驾驶员手忙脚乱,提高了恶劣路面下驾驶的安全性。
技术特征:
1.一种减少电动汽车前窜的控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的减少电动汽车前窜的控制方法,其特征在于,所述触发条件为当前时间达到提示时刻,其中,确定所述提示时刻的方法包括如下步骤:
3.根据权利要求1所述的减少电动汽车前窜的控制方法,其特征在于,所述触发条件为驾驶至提示坐标,其中,确定所述提示坐标的方法包括如下步骤:
4.根据权利要求3所述的减少电动汽车前窜的控制方法,其特征在于,所述若所述第一路面信息为颠簸路时,则设定该所述第一路面信息对应的所述路段坐标为所述第一路段坐标,还包括如下步骤:
5.根据权利要求1所述的减少电动汽车前窜的控制方法,其特征在于,所述触发条件为第二路面信息为颠簸路面或湿滑路面时,其中,获得所述第二路面信息的方法包括如下步骤:
6.根据权利要求1所述的减少电动汽车前窜的控制方法,其特征在于,所述触发条件为不稳定事件的次数等于不稳定阈值,确定不稳定事件的次数的方法包括如下步骤:
7.根据权利要求6所述的减少电动汽车前窜的控制方法,其特征在于,获取轮速波动值的方法包括如下步骤:
8.一种减少电动汽车前窜的控制系统,其特征在于,包括:
9.一种终端设备,其特征在于,包括处理器和存储器,其中,所述存储器存储有计算机程序,当所述计算机程序被所述处理器执行时,使得所述处理器执行权利要求1-7任一所述的减少电动汽车前窜的控制方法的步骤。
10.一种可读存储介质,其特征在于,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如权利要求1-7任一项所述的减少电动汽车前窜的控制方法。
技术总结
本申请提出一种减少电动汽车前窜的控制方法、控制系统、设备及介质,其中减少电动汽车前窜的控制方法为:在单踏板模式下判断是否满足触发条件,若满足触发条件则生成提示指令,若反馈指令为同意切换时,则将单踏板模式切换为湿滑模式;使用时,电动汽车可在经过恶劣路面前通过此方法将单踏板模式切换为湿滑模式,避免了ESC功能的启动,减少了车辆前窜的风险,避免车辆突发前窜问题导致驾驶员手忙脚乱,提高了恶劣路面下驾驶的安全性。
技术研发人员:刘辉,李军,吕学旺,李发强
受保护的技术使用者:重庆赛力斯新能源汽车设计院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!