车辆行驶装置的制作方法
本发明涉及车辆行驶装置。
背景技术:
1、已知有执行使本车辆以跟随先行车的方式行驶的跟随行驶控制的车辆行驶装置。另外,作为这样的车辆行驶装置,还已知如下的车辆行驶装置:在执行跟随行驶控制时,在使本车辆减速时使本车辆进行惯性行驶,由此实现本车辆的行驶所消耗的能量的减少(例如,参照专利文献1)。
2、现有技术文献
3、专利文献
4、专利文献1:日本专利第4677945号公报
技术实现思路
1、在现有的车辆行驶装置中,在执行跟随行驶控制时,使本车辆进行惯性行驶的时间越长,则本车辆的行驶所消耗的能量越少。另一方面,若使本车辆进行惯性行驶的时间变长,根据状况,有可能给本车辆的操作者带来不适感。
2、本发明的目的在于提供一种能够不给本车辆的操作者带来不适感地减少本车辆的行驶所消耗的能量的车辆行驶装置。
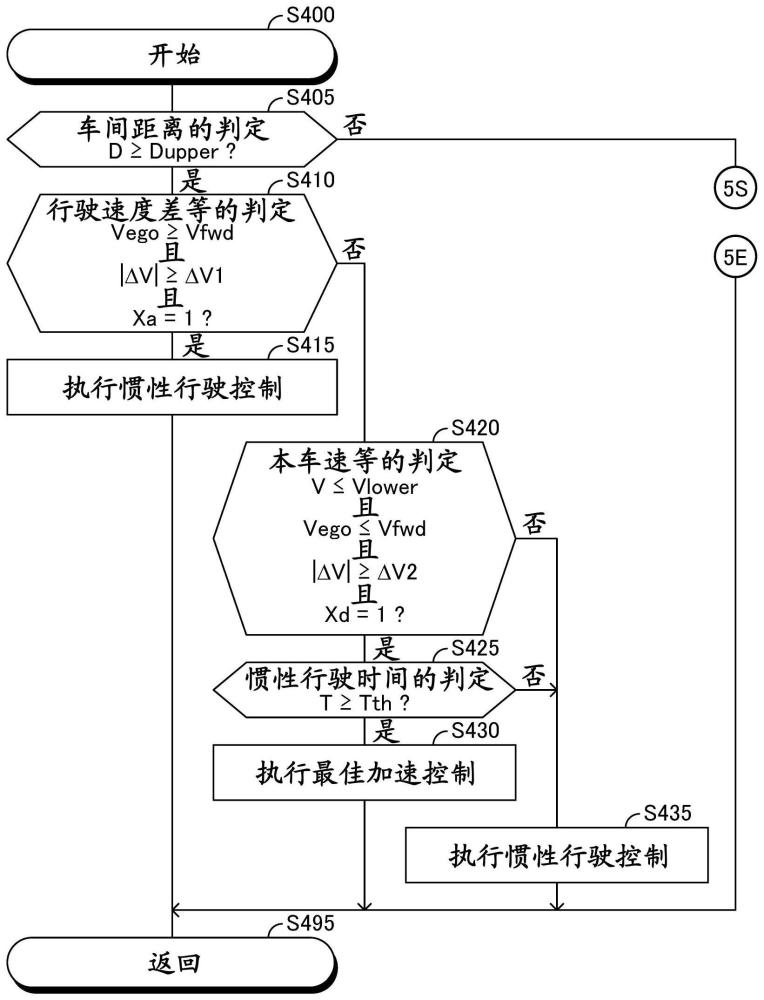
3、本发明所涉及的车辆行驶装置具备控制装置,所述控制装置执行自主加减速(加速、减速)控制,所述自主加减速控制通过在本车辆与先行车之间的距离减少并达到预定距离范围的下限值时开始使所述本车辆进行惯性行驶的惯性行驶控制,在所述本车辆与所述先行车之间的距离增大并达到所述预定距离范围的上限值时开始使所述本车辆加速的加速控制,从而以使所述本车辆与所述先行车之间的距离处于所述预定距离范围内的方式自主地控制所述本车辆的加减速。而且,所述控制装置构成为,在所述惯性行驶控制的执行期间中,在所述本车辆的行驶速度为预定速度以下且所述先行车的行驶速度大于所述本车辆的行驶速度且所述本车辆的行驶速度与所述先行车的行驶速度之差为预定速度差以上时,即使所述本车辆与所述先行车之间的距离增大并达到所述预定距离范围的上限值,在经过预定时间之前的期间中也继续进行所述惯性行驶控制。
4、在自主加减速控制的执行期间中,在先行车频繁地加速、减速时,如果在本车辆与先行车之间的距离达到预定距离范围的下限值时开始进行惯性行驶控制,并在本车辆与先行车之间的距离达到预定距离范围的上限值时开始进行加速控制,则会频繁地反复进行惯性行驶控制和加速控制。由此,本车辆的行驶所消耗的能量变多,本车辆反复接近、远离先行车,有可能给本车辆的操作者带来不适感。
5、另一方面,在先行车频繁地加速、减速时,若延长持续执行惯性行驶控制的时间,并从而延长持续执行加速控制的时间,则不会频繁地反复执行惯性行驶控制和加速控制。由此,不会给本车辆的操作者带来不适感,能够减少本车辆的行驶所消耗的能量。
6、根据本发明,当在惯性行驶控制的执行期间中本车辆的行驶速度成为预定速度以下且先行车的行驶速度大于本车辆的行驶速度且本车辆的行驶速度与先行车的行驶速度之差为预定速度差以上时,即使本车辆与先行车之间的距离增大并达到预定距离范围的上限值,在经过预定时间之前的期间中也会继续进行惯性行驶控制。因此,能够不给本车辆的操作者带来不适感地减少本车辆的行驶所消耗的能量。
7、另外,在本发明所涉及的车辆行驶装置中,所述加速控制例如是使所述本车辆的内燃机工作,通过从该内燃机输出的动力使所述本车辆加速的控制。另外,所述惯性行驶控制例如为,使所述内燃机的工作停止而使所述本车辆进行惯性行驶的控制。而且,在该情况下,例如,在所述惯性行驶控制的执行期间中所述本车辆与先行车之间的距离增大并达到所述预定距离范围的上限值时的所述本车辆的行驶速度越小,则所述预定时间被设定为越大的值。
8、在本车辆的行驶速度小时内燃机的起动所消耗的能量比在本车辆的行驶速度大时内燃机的起动所消耗的能量多。因此,如果在本车辆的行驶速度小时减少内燃机的起动次数,则内燃机的起动所消耗的能量变少,结果,能够减少本车辆的行驶所消耗的能量。
9、根据本发明,在惯性行驶控制的执行期间中本车辆与先行车之间的距离增大并达到预定距离范围的上限值时的所述本车辆的行驶速度越小,则将预定时间设定为越大的值,结果,持续进行惯性行驶控制的时间变长。因此,内燃机的起动次数变少,结果,能够进一步减少本车辆的行驶所消耗的能量。
10、本发明的构成要素不限定于后面参照附图叙述的本发明的实施方式。从对本发明的实施例的描述中应该能够容易理解本发明的其他目的、其他特征和伴随的优点。
技术特征:
1.一种车辆行驶装置,所述车辆行驶装置具备控制装置,
2.根据权利要求1所述的车辆行驶装置,
技术总结
提供车辆行驶装置,能不给予本车辆的操作者不适感地减少本车辆行驶消耗的能量。车辆行驶装置(10)通过在与先行车(200)的距离增大并达到预定距离范围的上限值时开始惯性行驶控制,在与先行车的距离减少并达到预定距离范围的下限值时开始加速控制,从而执行自主控制本车辆(100)的加减速的自主加减速控制,以使与先行车之间的距离处于预定距离范围内。当在惯性行驶控制的执行期间本车辆的行驶速度为预定速度以下且先行车的行驶速度大于本车辆的行驶速度且本车辆的行驶速度与先行车的行驶速度之差为预定速度差以上时,即使与先行车的距离增大并达到预定距离范围的上限值,车辆行驶装置也在经过预定时间之前的期间继续惯性行驶控制。
技术研发人员:镰谷英辉
受保护的技术使用者:丰田自动车株式会社
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!