一种车辆控制方法、装置及车辆与流程
本申请涉及汽车技术,特别是涉及一种车辆控制方法、装置及车辆。
背景技术:
1、目前,具有混合动力架构的车辆在低速拥堵工况下,通常使用串联工作模式,即通过发动机驱动发电机发电,带动驱动电机运转,从而驱动车辆,在此过程中,尤其是在车辆停车或以极低速行驶时,发动机运转带来的噪声以及震动会给车上的乘员带来不适感,影响乘员的舒适性。
技术实现思路
1、本申请实施例提供了一种车辆控制方法、装置及车辆,以解决车辆在拥堵低速工况下如何提高乘坐舒适性的问题。
2、第一方面,本申请实施例提供了一种车辆控制方法,所述方法包括:
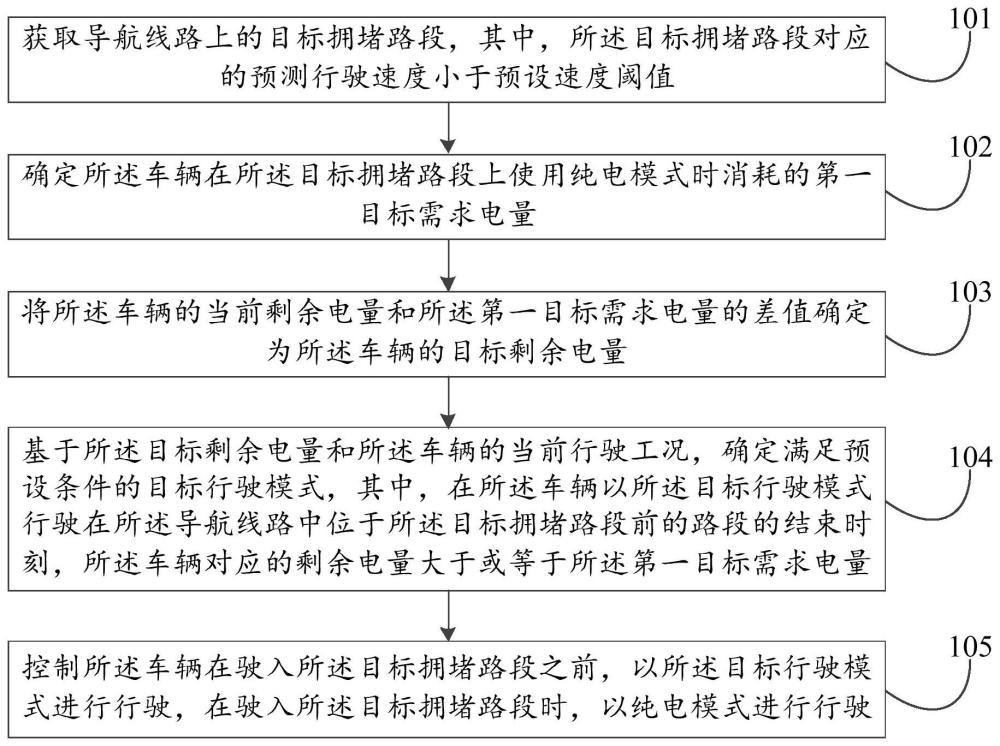
3、获取导航线路上的目标拥堵路段,其中,所述目标拥堵路段对应的预测行驶速度小于预设速度阈值;
4、确定所述车辆在所述目标拥堵路段上使用纯电模式时消耗的第一目标需求电量;
5、将所述车辆的当前剩余电量和所述第一目标需求电量的差值确定为所述车辆的目标剩余电量;
6、基于所述目标剩余电量和所述车辆的当前行驶工况,确定满足预设条件的目标行驶模式,其中,在所述车辆以所述目标行驶模式行驶在所述导航线路中位于所述目标拥堵路段前的路段的结束时刻,所述车辆对应的剩余电量大于或等于所述第一目标需求电量;
7、控制所述车辆在驶入所述目标拥堵路段之前,以所述目标行驶模式进行行驶,在驶入所述目标拥堵路段时,以纯电模式进行行驶。
8、第二方面,本申请实施例还提供一种车辆控制装置,所述装置包括:
9、第一获取模块,用于获取导航线路上的目标拥堵路段,其中,所述目标拥堵路段对应的预测行驶速度小于预设速度阈值;
10、第一确定模块,用于确定所述车辆在所述目标拥堵路段上使用纯电模式时消耗的第一目标需求电量;
11、第二确定模块,用于将所述车辆的当前剩余电量和所述第一目标需求电量的差值确定为所述车辆的目标剩余电量;
12、第三确定模块,用于基于所述目标剩余电量和所述车辆的当前行驶工况,确定满足预设条件的目标行驶模式,其中,在所述车辆以所述目标行驶模式行驶在所述导航线路中位于所述目标拥堵路段前的路段的结束时刻,所述车辆对应的剩余电量大于或等于所述第一目标需求电量;
13、控制模块,用于控制所述车辆在驶入所述目标拥堵路段之前,以所述目标行驶模式进行行驶,在驶入所述目标拥堵路段时,以纯电模式进行行驶。
14、第三方面,本申请实施例提供了一种车辆,该车辆包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现上述的车辆控制方法。
15、本申请实施例至少包括以下技术效果:
16、本申请实施例的技术方案,通过预先计算出在预测行驶速度小于预设速度阈值的目标拥堵路段上使用纯电模式对应的第一目标需求电量,并通过第一目标需求电量和车辆的当前剩余电量,确定车辆预留出第一目标需求电量后的目标剩余电量,并基于该目标剩余电量和车辆的当前行驶工况确定目标行驶模式,以使车辆在以目标行驶模式行驶结束时,也就是将进入目标拥堵路段时,车辆对应的实际剩余电量可以满足车辆以纯电模式进行行驶,从而实现了预留出第一目标需求电量用于目标拥堵路段纯电模式行驶的目的,且通过在目标拥堵路段使用纯电模式行驶,可以使发动机不处于工作状态,降低油耗的同时可以消除发动机运转带来的噪声和震动,提高乘坐舒适性。
技术特征:
1.一种车辆控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的车辆控制方法,其特征在于,获取导航线路上的目标拥堵路段,包括:
3.根据权利要求1所述的车辆控制方法,其特征在于,在获取导航线路上的目标拥堵路段之前,所述方法还包括:
4.根据权利要求1所述的车辆控制方法,其特征在于,确定所述车辆在所述目标拥堵路段上使用纯电模式时消耗的第一目标需求电量,包括:
5.根据权利要求4所述的车辆控制方法,其特征在于,获取所述子路段对应的平均电量消耗,包括:
6.根据权利要求1所述的车辆控制方法,其特征在于,在确定所述车辆在所述目标拥堵路段上使用纯电模式时消耗的第一目标需求电量之后,所述方法还包括:
7.根据权利要求1所述的车辆控制方法,其特征在于,基于所述目标剩余电量和所述车辆的当前行驶工况,确定满足预设条件的目标行驶模式之前,所述方法还包括:
8.根据权利要求1所述的车辆控制方法,其特征在于,所述目标行驶模式包括所述车辆对应的行驶模式列表中的至少一种行驶模式,每一种行驶模式对应于非拥堵路段中的至少一段路段,其中,所述非拥堵路段为所述导航线路上除所述目标拥堵路段外的路段;所述行驶模式列表至少包括:充电模式、纯电模式、串联模式和并联模式;
9.一种车辆控制装置,其特征在于,包括:
10.一种车辆,其特征在于,包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1至8任一项所述的车辆控制方法。
技术总结
本申请提供一种车辆控制方法、装置及车辆,该车辆控制方法包括:获取导航线路上的目标拥堵路段;确定车辆在目标拥堵路段上使用纯电模式时消耗的第一目标需求电量;将车辆的当前剩余电量和第一目标需求电量的差值确定为目标剩余电量;基于目标剩余电量和车辆的当前行驶工况,确定满足预设条件的目标行驶模式;控制车辆在驶入目标拥堵路段之前,以目标行驶模式进行行驶,在驶入标拥堵路段时,以纯电模式进行行驶。本申请实现了预留出第一目标需求电量用于目标拥堵路段纯电模式行驶的目的,且通过在目标拥堵路段使用纯电模式行驶,可以使发动机不处于工作状态,在降低油耗的同时可以消除发动机运转带来的噪声和震动,提高乘坐舒适性。
技术研发人员:刘哲
受保护的技术使用者:长城汽车股份有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!