后下部防护装置调节方法、装置、设备及可读存储介质与流程
本申请涉及车辆安全,具体涉及一种后下部防护装置调节方法、装置、设备及可读存储介质。
背景技术:
1、载货类汽车的后下部防护装置是一种汽车追尾时防止追尾车辆钻入被追尾车辆下部的安全装置,是载货类汽车的必备装置。由于国家标准中严格规定了后下部防护装置的离地高度上限,通常情况下后下部防护装置保持较低的离地高度,容易受坡度变化影响与地面磕碰损坏失去防护作用。
技术实现思路
1、本申请提供一种后下部防护装置调节方法、装置、设备及可读存储介质,可以解决现有技术中存在的后下部防护装置容易受坡度变化影响与地面磕碰损坏失去防护作用的技术问题。
2、第一方面,本申请实施例提供一种后下部防护装置调节方法,所述后下部防护装置调节方法包括:
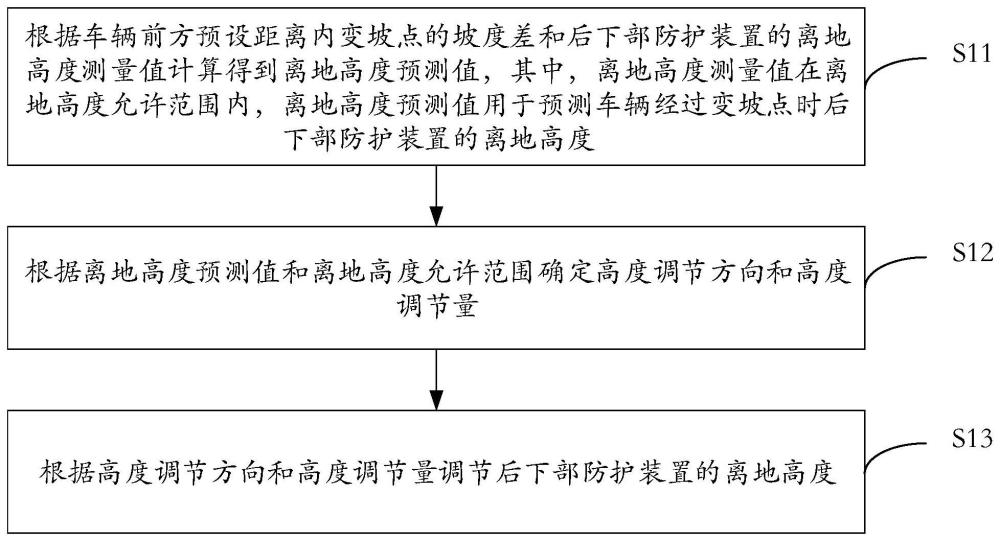
3、根据车辆前方预设距离内变坡点的坡度差和后下部防护装置的离地高度测量值计算得到离地高度预测值,其中,离地高度测量值在离地高度允许范围内,离地高度预测值用于预测车辆经过变坡点时后下部防护装置的离地高度;
4、根据离地高度预测值和离地高度允许范围确定高度调节方向和高度调节量;
5、根据高度调节方向和高度调节量调节后下部防护装置的离地高度。
6、进一步地,一实施例中,在所述根据高度调节方向和高度调节量调节后下部防护装置的离地高度的步骤之前还包括:
7、根据车辆与变坡点之间的距离和当前车速计算得到调节可用时长,根据高度调节量确定调节所需时长;
8、若调节可用时长小于调节所需时长,则降低车速,以使新的调节可用时长大于或等于调节所需时长。
9、进一步地,一实施例中,所述根据离地高度预测值和离地高度允许范围确定高度调节方向和高度调节量的步骤包括:
10、若离地高度预测值小于离地高度允许范围的下限值,则确定高度调节方向为远离地面,高度调节量为下限值与离地高度预测值之差。
11、进一步地,一实施例中,所述根据离地高度预测值和离地高度允许范围确定高度调节方向和高度调节量的步骤包括:
12、若离地高度预测值大于上限值,则确定高度调节方向为靠近地面,高度调节量为离地高度预测值与上限值之差和离地高度测量值与下限值之差中的较小者。
13、进一步地,一实施例中,在所述根据高度调节方向和高度调节量调节后下部防护装置的离地高度的步骤之后还包括:
14、在车辆经过变坡点后,根据高度调节方向的反方向和高度调节量调节后下部防护装置的离地高度。
15、进一步地,一实施例中,所述根据车辆前方预设距离内变坡点的坡度差和后下部防护装置的离地高度测量值计算得到离地高度预测值的步骤包括:
16、根据离地高度预测公式计算得到离地高度预测值,离地高度预测公式为:
17、h1=h0-l·δi
18、其中,h1为离地高度预测值,h0为离地高度测量值,l为后悬长度,δi为坡度差。
19、进一步地,一实施例中,在所述根据车辆前方预设距离内变坡点的坡度差和后下部防护装置的离地高度测量值计算得到离地高度预测值的步骤之前还包括:
20、持续监测车辆前方预设距离内是否存在变坡点;
21、若存在变坡点,则获取变坡点的坡度差和后下部防护装置的离地高度测量值。
22、第二方面,本申请实施例还提供一种后下部防护装置调节装置,所述后下部防护装置调节装置包括:
23、预测模块,用于根据车辆前方预设距离内变坡点的坡度差和后下部防护装置的离地高度测量值计算得到离地高度预测值,其中,离地高度测量值在离地高度允许范围内,离地高度预测值用于预测车辆经过变坡点时后下部防护装置的离地高度;
24、调节分析模块,用于根据离地高度预测值和离地高度允许范围确定高度调节方向和高度调节量;
25、调节执行模块,用于根据高度调节方向和高度调节量调节后下部防护装置的离地高度。
26、第三方面,本申请实施例还提供一种后下部防护装置调节设备,所述后下部防护装置调节设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的后下部防护装置调节程序,其中所述后下部防护装置调节程序被所述处理器执行时,实现上述后下部防护装置调节方法的步骤。
27、第四方面,本申请实施例还提供一种可读存储介质,所述可读存储介质上存储有后下部防护装置调节程序,其中所述后下部防护装置调节程序被处理器执行时,实现上述后下部防护装置调节方法的步骤。
28、本申请中,根据车辆前方预设距离内变坡点的坡度差和后下部防护装置的离地高度测量值计算得到离地高度预测值,其中,离地高度测量值在离地高度允许范围内,离地高度预测值用于预测车辆经过变坡点时后下部防护装置的离地高度;根据离地高度预测值和离地高度允许范围确定高度调节方向和高度调节量;根据高度调节方向和高度调节量调节后下部防护装置的离地高度。通过本申请,对车辆经过变坡点时后下部防护装置的离地高度进行预测,进而确定高度调节方向和高度调节量,提前对后下部防护装置的离地高度进行准确调节,避免其与地面磕碰损坏失去防护作用,并且尽量保证后下部防护装置的离地高度始终满足法规要求。
技术特征:
1.一种后下部防护装置调节方法,其特征在于,所述后下部防护装置调节方法包括:
2.如权利要求1所述的后下部防护装置调节方法,其特征在于,在所述根据高度调节方向和高度调节量调节后下部防护装置的离地高度的步骤之前还包括:
3.如权利要求1所述的后下部防护装置调节方法,其特征在于,所述根据离地高度预测值和离地高度允许范围确定高度调节方向和高度调节量的步骤包括:
4.如权利要求1所述的后下部防护装置调节方法,其特征在于,所述根据离地高度预测值和离地高度允许范围确定高度调节方向和高度调节量的步骤包括:
5.如权利要求1所述的后下部防护装置调节方法,其特征在于,在所述根据高度调节方向和高度调节量调节后下部防护装置的离地高度的步骤之后还包括:
6.如权利要求1至5中任一项所述的后下部防护装置调节方法,其特征在于,所述根据车辆前方预设距离内变坡点的坡度差和后下部防护装置的离地高度测量值计算得到离地高度预测值的步骤包括:
7.如权利要求1至5中任一项所述的后下部防护装置调节方法,其特征在于,在所述根据车辆前方预设距离内变坡点的坡度差和后下部防护装置的离地高度测量值计算得到离地高度预测值的步骤之前还包括:
8.一种后下部防护装置调节装置,其特征在于,所述后下部防护装置调节装置包括:
9.一种后下部防护装置调节设备,其特征在于,所述后下部防护装置调节设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的后下部防护装置调节程序,其中所述后下部防护装置调节程序被所述处理器执行时,实现如权利要求1至7中任一项所述的后下部防护装置调节方法的步骤。
10.一种可读存储介质,其特征在于,所述可读存储介质上存储有后下部防护装置调节程序,其中所述后下部防护装置调节程序被处理器执行时,实现如权利要求1至7中任一项所述的后下部防护装置调节方法的步骤。
技术总结
本申请提供一种后下部防护装置调节方法、装置、设备及可读存储介质,该方法包括:根据车辆前方预设距离内变坡点的坡度差和后下部防护装置的离地高度测量值计算得到离地高度预测值,其中,离地高度测量值在离地高度允许范围内,离地高度预测值用于预测车辆经过变坡点时后下部防护装置的离地高度;根据离地高度预测值和离地高度允许范围确定高度调节方向和高度调节量;根据高度调节方向和高度调节量调节后下部防护装置的离地高度。通过本申请,对车辆经过变坡点时后下部防护装置的离地高度进行预测,进而确定高度调节方向和高度调节量,提前对后下部防护装置的离地高度进行准确调节,避免其与地面磕碰损坏失去防护作用。
技术研发人员:刘海霞,周伟剑,李艳慧,刘伟,雷颖絜,彭绮雯,张育维,陈美君,韩佳佳,赵云洋,何斌
受保护的技术使用者:东风商用车有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!