动力模组以及机器人的制作方法
本申请涉及机器人,具体涉及一种动力模组以及机器人。
背景技术:
1、动力模组是一种用于为机器人运动提供动力的结构件,是机器人的核心部件。
2、部分动力模组内设置了行星减速机,以提升输出的扭矩,但是,在行星减速机内布线较为困难。
技术实现思路
1、本申请的目的在于提出一种动力模组或机器人,以改善上述至少一项技术问题。本申请通过以下技术方案来实现上述目的。
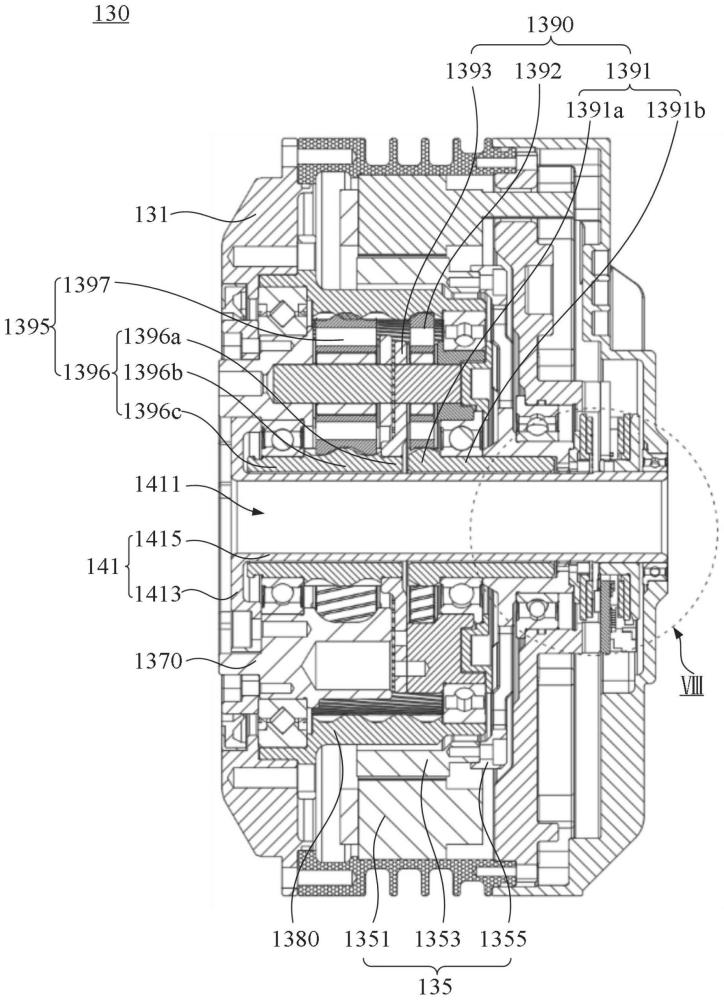
2、第一方面,本申请实施方式提供了一种动力模组,包括壳体、驱动件、多级行星减速机以及中空轴,驱动件设置于壳体,驱动件包括定子、转子和转子支架,定子连接于壳体内,转子连接于转子支架;多级行星减速机设置于壳体,多级行星减速机连接于转子支架,多级行星减速机至少部分地穿设于驱动件,多级行星减速机包括动力输出件;中空轴设有贯穿中空轴的过线通道,多级行星减速机、定子、转子和转子支架均环绕中空轴,中空轴连接于动力输出件,中空轴与动力输出件同轴线转动。
3、在一些实施例中,多级行星减速机还包括内齿圈、一级行星齿轮组和二级行星齿轮组,内齿圈连接于壳体内;一级行星齿轮组连接于转子支架,一级行星齿轮组和二级行星齿轮组均位于内齿圈内,一级行星齿轮组与二级行星齿轮组均和内齿圈传动连接,一级行星齿轮组和二级行星齿轮组传动连接,内齿圈、一级行星齿轮组和二级行星齿轮组均环绕中空轴。
4、在一些实施例中,一级行星齿轮组包括一级太阳轮、一级行星轮和行星架,一级太阳轮连接于转子支架,一级太阳轮和转子同轴线转动,一级行星轮连接于行星架,一级行星轮啮合于一级太阳轮和内齿圈之间;二级行星齿轮组包括二级太阳轮和二级行星轮,二级太阳轮连接于行星架,二级太阳轮与行星架同轴线转动,二级行星轮连接于动力输出件,二级行星轮啮合于二级太阳轮和内齿圈之间;二级太阳轮、行星架和一级太阳轮均环绕中空轴。
5、在一些实施例中,定子环绕于内齿圈,定子位于内齿圈和壳体之间。
6、在一些实施例中,中空轴包括相连接的中空固定段和中空连接段,过线通道贯穿中空固定段和中空连接段,中空固定段连接于动力输出件,动力输出件、二级太阳轮、行星架和一级太阳轮均环绕中空连接段。
7、在一些实施例中,动力模组还包括连接轴承,壳体设有安装通孔,连接轴承设置于安装通孔内,连接轴承的外圈连接于壳体,连接轴承的内圈连接于中空轴。
8、在一些实施例中,动力模组还包括第一位置检测件,第一位置检测件包括第一磁性件和第一感测件,第一磁性件连接于转子支架,第一磁性件环绕中空轴,第一感测件设置于壳体内且与壳体连接,第一感测件与第一磁性件相对且间隔设置。
9、在一些实施例中,动力模组还包括第二位置检测件,第二位置检测件包括第二磁性件和第二感测件,第二磁性件环绕并连接于中空轴,第二感测件设置于壳体内且与壳体连接,第二感测件与第二磁性件相对且间隔设置。
10、在一些实施例中,动力模组还包括控制板,控制板连接于壳体,控制板至少部分位于第一磁性件和第二磁性件之间,第一感测件和第二感测件均通过控制板连接于壳体。
11、在一些实施例中,第一位置检测件和第二位置检测件均设置于壳体内,第一位置检测件和第二位置检测件均位于多级行星减速机背离动力输出件的一侧。
12、第二方面,本申请实施例提供了一种机器人,包括机身以及上述任一实施方式中的动力模组,动力模组安装于机身。
13、本申请实施例提供的动力模组和机器人中,动力模组包括壳体、驱动件、多级行星减速机以及中空轴。多级行星减速机连接于转子支架,多级行星减速机包括动力输出件,从而转子带动转子支架转动时,可以带动多级行星减速机运动,以通过动力输出件输出动力。相较于传统的单级行星减速机通过减少太阳轮的齿数来增大速比和提升扭矩密度的方式,本申请实施例提供的动力模组通过采用多级行星减速机即可增大速比和提升扭矩密度,而无需减少多级行星减速机内的太阳轮的齿数,进而无需缩小太阳轮的尺寸,有助于太阳轮有足够的尺寸可以安装中空轴。中空轴设有贯穿中空轴的过线通道,中空轴连接于动力输出件,中空轴与动力输出件同轴线转动,从而可以在过线通道内布置线束,使得布置线束较为方便,还有助于线束的布置更加整洁,动力模组更加美观。
技术特征:
1.一种动力模组,其特征在于,包括:
2.根据权利要求1所述的动力模组,其特征在于,所述多级行星减速机还包括内齿圈、一级行星齿轮组和二级行星齿轮组,所述内齿圈连接于所述壳体内;所述一级行星齿轮组连接于所述转子支架,所述一级行星齿轮组和所述二级行星齿轮组均位于所述内齿圈内,所述一级行星齿轮组与所述二级行星齿轮组均和所述内齿圈传动连接,所述一级行星齿轮组和所述二级行星齿轮组传动连接,所述内齿圈、所述一级行星齿轮组和所述二级行星齿轮组均环绕所述中空轴。
3.根据权利要求2所述的动力模组,其特征在于,所述一级行星齿轮组包括一级太阳轮、一级行星轮和行星架,所述一级太阳轮连接于所述转子支架,所述一级太阳轮和所述转子同轴线转动,所述一级行星轮连接于所述行星架,所述一级行星轮啮合于所述一级太阳轮和所述内齿圈之间;
4.根据权利要求3所述的动力模组,其特征在于,所述定子环绕于所述内齿圈,所述定子位于所述内齿圈和所述壳体之间。
5.根据权利要求3所述的动力模组,其特征在于,所述中空轴包括相连接的中空固定段和中空连接段,所述过线通道贯穿所述中空固定段和所述中空连接段,所述中空固定段连接于所述动力输出件,所述动力输出件、所述二级太阳轮、所述行星架和所述一级太阳轮均环绕所述中空连接段。
6.根据权利要求1所述的动力模组,其特征在于,所述动力模组还包括连接轴承,所述壳体设有安装通孔,所述连接轴承设置于所述安装通孔内,所述连接轴承的外圈连接于所述壳体,所述连接轴承的内圈连接于所述中空轴。
7.根据权利要求1所述的动力模组,其特征在于,所述动力模组还包括第一位置检测件,所述第一位置检测件包括第一磁性件和第一感测件,所述第一磁性件连接于所述转子支架,所述第一磁性件环绕所述中空轴,所述第一感测件设置于所述壳体内且与所述壳体连接,所述第一感测件与所述第一磁性件相对且间隔设置。
8.根据权利要求7所述的动力模组,其特征在于,所述动力模组还包括第二位置检测件,所述第二位置检测件包括第二磁性件和第二感测件,所述第二磁性件环绕并连接于所述中空轴,所述第二感测件设置于所述壳体内且与所述壳体连接,所述第二感测件与所述第二磁性件相对且间隔设置。
9.根据权利要求8所述的动力模组,其特征在于,所述动力模组还包括控制板,所述控制板连接于所述壳体,所述控制板至少部分位于所述第一磁性件和所述第二磁性件之间,所述第一感测件和所述第二感测件均通过所述控制板连接于所述壳体。
10.根据权利要求8所述的动力模组,其特征在于,所述第一位置检测件和所述第二位置检测件均设置于所述壳体内,所述第一位置检测件和所述第二位置检测件均位于所述多级行星减速机背离所述动力输出件的一侧。
11.一种机器人,其特征在于,包括:
技术总结
本申请提供了一种动力模组和机器人,动力模组包括壳体、驱动件、多级行星减速机以及中空轴,驱动件设置于壳体,驱动件包括定子、转子和转子支架,定子连接于壳体内,转子连接于转子支架;多级行星减速机设置于壳体,多级行星减速机连接于转子支架,多级行星减速机至少部分地穿设于驱动件,多级行星减速机包括动力输出件;中空轴设有贯穿中空轴的过线通道,多级行星减速机、定子、转子和转子支架均环绕中空轴,中空轴连接于动力输出件,中空轴与动力输出件同轴线转动。如此,有助于增大动力模组的速比和提升扭矩密度,且线束可以布置于中空轴的过线通道内,使得布置线束较为方便,还有助于线束的布置更加整洁,动力模组更加美观。
技术研发人员:张廷龙,李海雷,黑光军,张小鹏,王佩
受保护的技术使用者:广州小鹏汽车科技有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!