一种半球形水陆两栖机器人
本发明属于机器人领域,特别涉及一种半球形水陆两栖机器人。
背景技术:
1、水陆两栖机器人具有高机动性和多地形适应性等优点,能在陆地、湖泊和海洋等环境执行人类难以完成的侦察、救援和巡检等任务,具有广阔的应用前景。
2、但由于受到环境的制约,尤其在水面工作时,水陆两栖机器人的控制部件、通信设备和检测装置经常放置在内部狭小的区域内,由于探测设备存放空间受限且不便安置与取出,水陆两栖机器人只能搭载较为简单且体积较小的探测设备,难以满足机器人对多种环境的探测需求,并且水面环境复杂,水陆两栖机器人在水面工作的时候容易与礁石或者过往船只发生碰撞,探测仪器设备易受到撞击损坏。因此,亟需一种水陆两栖机器人,具有较大探测设备保护存放空间且可以灵活打开和封闭,满足探测水陆两种环境状况的设备取放需求与设备保护需求。
技术实现思路
1、本发明的目的是针对现有技术存在的上述缺陷,公开一种半球形水陆两栖机器人,半球形水陆两栖机器人可以灵活打开和闭合。在自动控制形成的封闭状态下,通信仪器与设备和检测装置等因为被布置于半球形外壳的内部,可以得到很好的保护。
2、本发明采用的技术方案为:
3、一种半球形水陆两栖机器人,包括机器人骨架、球壳保护罩、轮桨复合行进机构、浮力模块及动力模块。
4、所述机器人骨架为圆片型镂空结构,机器人骨架上方承载球壳保护罩,下方固定轮桨复合行进机构及动力模块。
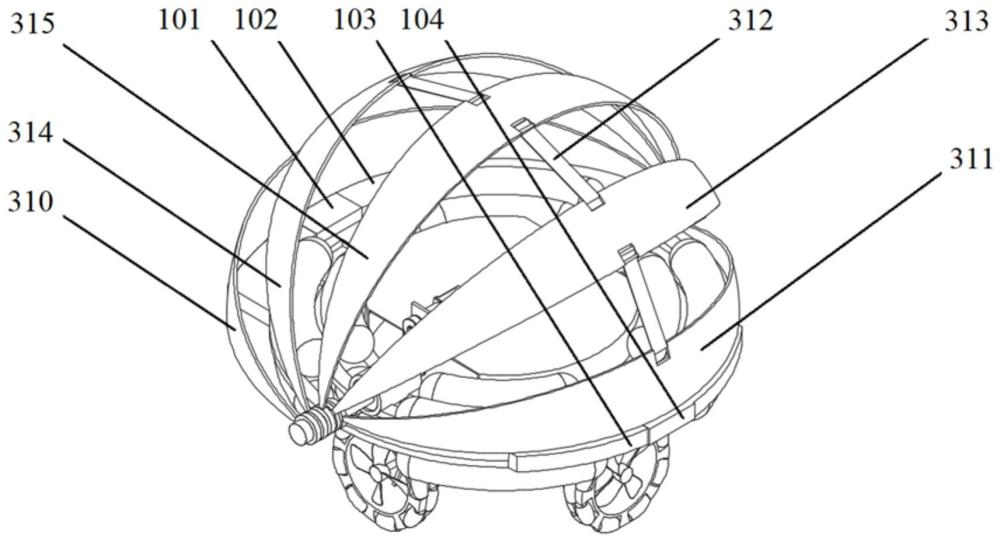
5、所述保护罩为设置有半圆形空腔的可开闭的半圆形球壳防护罩,包括五片相互独立的球壳片防护罩与四片柔性带,球壳片与球壳片之间通过柔性带连接。
6、所述轮桨复合行进机构由四组轮桨复合模块组成,包括四个螺旋桨、四个全向轮、四根螺旋桨主轴以及四根被动带轮中空轴,其中一个螺旋桨、一个全向轮、一根螺旋桨主轴与一根被动带轮中空轴组成一组轮桨复合模块,螺旋桨主轴通过轴承固定在被动带轮中空轴中间;四组轮桨复合模块沿周向等间距布设在所述机器人骨架下方。
7、所述浮力模块由16个呈弯曲圆柱状的气囊浮子组成,每8个气囊浮子为一组,两组气囊浮子对称安装在所述机器人骨架上下方。
8、所述动力模块由四个万向轮驱动伺服电机、四个螺旋桨驱动直流减速步进电机、四个主动带轮、四个从动带轮以及四根同步带构成,其中螺旋桨驱动直流减速步进电机连接所述螺旋桨主轴,万向轮驱动伺服电机通过所述主动带轮及同步带将动力传输给连接从动带轮的被动带轮中空轴。
9、本发明的优点与有益效果如下:
10、本发明实现水陆两栖机器人仪器设备存放空间的可开闭,当机器人在陆地上时,球壳防护罩开启,便于放置或取出仪器设备;当机器人在水面工作时,防护罩闭合,在与礁石或其它船只碰撞时,能为放置于机器人中的仪器设备提供良好的保护。防护罩的开闭较为灵活,只需一个电机即可实现防护罩的打开与关闭,控制功能实现简单,相较于普通水陆两栖机器人,半球形水陆两栖机器人能够根据环境需求灵活放置各类通信与探测仪器设备且具备良好保护功能,探测范围更为宽阔,探测环境更加多样。
11、本发明将陆地行进机构万向轮与水面推进机构螺旋桨集成在一套轮桨复合模块当中,减小机器人体积,提高机器人空间利用效率。
12、本发明16个气囊浮子的设置使机器人在水面推进时,即使单个气囊浮子受损,其余15个气囊浮子也能为机器人提供足够浮力,提高系统可靠性。
技术特征:
1.一种半球形水陆两栖机器人,其特征在于,包括机器人骨架(1)、气囊浮子(2)、球壳防护罩(3)、轮桨复合行进机构(4)以及为机器人提供行进动力的电机模块,其中气囊浮子(2)周向等间距对称置于机器人骨架(1)上下方,用于为机器人提供在水面行驶时的浮力;球壳防护罩(3)设置在机器人骨架(1)上方,并且气囊浮子(2)位于机器人骨架(1)上方部分设置在球壳防护罩(3)内部;轮桨复合行进机构(4)与电机模块均置于机器人(1)骨架下对方,其中轮桨复合机构(4)沿周向等间距布置在电机模块外围,轮桨复合行进机构(4)用于实现机器人水陆两栖工作模式,电机模块用于为轮桨复合机构(4)提供动力。
2.根据权利要求1所述的一种半球形水陆两栖机器人,其特征在于,球壳防护罩(3)由直径不同且相互独立的5片球壳防护罩片组成,这些球壳防护罩片按照直径大小,用柔性带(312)顺序两两连接,只有直径最大的第1片防护罩片(310)具有连通球壳两端的完整主轴(309),它的转动是由防护罩驱动伺服电机(301),经由同步带机构驱动而转动;其它球壳防护罩片按照直径大小的顺序,由对应的柔性带(312)牵引,依次被带动,直到5片球壳防护罩片完全打开,此时柔性带(312)已被拉直,防护罩片形成有空隙的封闭的半球形状态。
3.根据权利要求1所述的一种半球形水陆两栖机器人,其特征在于,轮桨复合机构(4)可以实现陆地和水中行进,螺旋桨驱动减速直流电机(405)带动螺旋桨,实现机器人在水中运动;万向轮驱动伺服电机(404)带动全向轮旋转,实现在陆地上的全方位移动,即无需转向机构,就可以前进、后退、左移、右移和零半径转弯。
4.根据权利要求3所述的一种半球形水陆两栖机器人,其特征在于,轮桨复合机构(4)中四个“螺旋桨和全向轮复合机构”两两相对安装,在水中可以向前后左右四个方向即时改变运动方向,这对于需要高机动性的水上侦察作业非常便利;在陆地上,利用全向轮上的被动轮(402),机器人可以实现前后左右四个方向的灵活移动,相对两轮的减速直流电机转速不同,可以实现机器人的灵活转向。
5.根据权利要求4所述的一种半球形水陆两栖机器人,其特征在于,螺旋桨和全向轮复合结构,在水中转弯行进的方式是由相邻两个螺旋桨同时驱动且转速配合来实现。
技术总结
本发明公开一种半球形水陆两栖机器人,包括机器人骨架、球壳保护罩、轮桨复合模块、浮力模块及动力模块;其中球壳保护罩设置在机器人骨架上方,由五片球壳防护罩片组成;轮桨复合行进机构由四组轮桨复合模块组成,四组轮桨复合模块布置在机器人骨架下方;浮力模块由16个气囊浮子组成,为机器人水面行进提供浮力;动力模块包括万向轮驱动伺服电机、螺旋桨驱动直流减速步进电机、主动带轮、从动带轮以及同步带,可为机器人陆地行进与水面行进提供动力;本发明可灵活放置各类通讯及检测设备,机器人在水面工作时其放置于内部的仪器设备可得到较好的保护,同时本发明将万向轮与螺旋桨集成在轮桨复合模块中,提高机器人空间利用效率。
技术研发人员:沈志杰,丁涛,侯梦佳,张鼎一,陈钰欣,胡立芳,石明娟,穆金霞
受保护的技术使用者:中国计量大学
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!