一种遥控泊车制动方法、装置及燃油车与流程
本申请涉及制动,具体而言,涉及一种遥控泊车制动方法、装置及燃油车。
背景技术:
1、目前,对于燃油车上的遥控泊车系统来说,在泊车过程中的制动主要是通过车辆的电子稳定控制系统的线控制动功能来实现。若泊车过程中出现电子稳定控制系统主动建压失效这类安全风险时,泊车系统将失去刹停车辆的能力。并且,在遥控泊车过程中,由于驾驶员始终处于车外,一旦电子稳定控制系统发生失效,驾驶员将无法通过踩踏板刹停车辆。为了规避遥控泊车过程的安全风险,制动系统有必要进行冗余设计,以确保制动系统发生单点失效时,仍有能力刹停车辆。
2、因此,如何在布置改动小,成本低的前提下,确保燃油车在遥控泊车过程中制动系统发生单点失效时,仍有能力刹停车辆是本领域技术人员亟待解决的技术问题。
技术实现思路
1、有鉴于此,本申请的目的在于提供一种遥控泊车制动方法、装置及燃油车,以解决现有技术中如何在布置改动小,成本低的前提下,确保燃油车在遥控泊车过程中制动系统发生单点失效时,仍有能力刹停车辆的技术问题。
2、为了实现上述目的,本申请实施例采用的技术方案如下:
3、第一方面,本申请实施例提供了一种遥控泊车制动方法,应用于燃油车制动系统中的电子驻车制动系统,所述燃油车制动系统还包括电子稳定控制系统,所述电子驻车制动系统与所述电子稳定控制系统独立设置,所述方法包括:
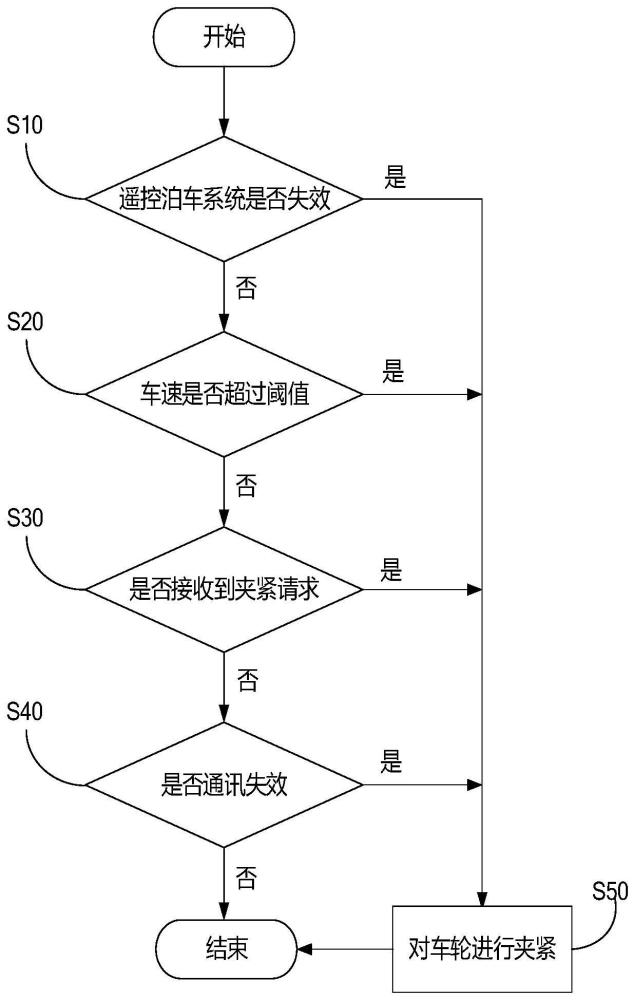
4、当处于遥控泊车状态时,获取车辆的车速;
5、当所述车速小于阈值时,判断是否接收到所述电子稳定控制系统发送的夹紧请求;其中,所述夹紧请求为所述电子稳定控制系统在硬件失效时发出;
6、如果是,则对车轮进行夹紧。
7、在一种可能的实施方式中,在所述判断是否接收到所述电子稳定控制系统发送的夹紧请求的步骤之后,所述方法还包括:
8、当未接收到所述电子稳定控制系统发送的夹紧请求时,判断所述电子稳定控制系统是否通讯失效;
9、如果是,则对车轮进行夹紧。
10、在一种可能的实施方式中,在所述获取车辆的车速的步骤之后,所述方法还包括:
11、当所述车速大于阈值时,对车轮进行夹紧。
12、在一种可能的实施方式中,在所述获取车辆的车速的步骤之前,所述方法还包括:
13、判断遥控泊车系统是否失效;
14、如果是,则对车轮进行夹紧;
15、如果否,则执行获取车辆的车速的步骤。
16、在一种可能的实施方式中,所述判断遥控泊车系统是否失效的步骤包括:
17、获取所述遥控泊车系统的状态机信号;
18、判断所述状态机信号丢失是否超过阈值;
19、如果是,则确定所述遥控泊车系统失效。
20、在一种可能的实施方式中,所述电子驻车制动系统包括主控回路与备用回路,所述主控回路与所述备用回路均与车轮连接;所述对车轮进行夹紧的步骤包括:
21、当所述主控回路失效时,向所述备用回路发送夹紧指令。
22、在一种可能的实施方式中,所述电子驻车制动系统包括主控回路与备用回路,所述主控回路与所述备用回路均包括第一线路与第二线路,所述第一线路与所述第二线路分别连接后左轮与后右轮;所述对车轮进行夹紧的步骤包括:
23、当所述第一线路与所述第二线路均正常时,向所述第一线路与所述第二线路均发送第一信号;
24、当所述第一线路或所述第二线路断开时,向未断开的线路发送第二信号;其中,所述第二信号大于所述第一信号。
25、第二方面,本申请实施例提供了一种遥控泊车制动装置,应用于燃油车制动系统的电子驻车制动系统,所述燃油车制动系统还包括电子稳定控制系统,所述电子驻车制动系统与所述电子稳定控制系统独立设置,所述装置包括:
26、获取模块,用于当处于遥控泊车状态时,获取车辆的车速;
27、判断模块,用于当所述车速低于阈值时,判断是否接收到所述电子稳定控制系统发送的夹紧请求;其中,所述夹紧请求为所述电子稳定控制系统在硬件失效时发出;
28、夹紧模块,用于当接收到所述电子稳定控制系统发送的夹紧请求时,对车轮进行夹紧。
29、在一种可能的实施方式中,所述燃油车制动系统还包括供电模块、第一保险丝与第二保险丝,所述电子驻车制动系统通过所述第一保险丝与所述供电模块连接,所述电子稳定控制系统通过所述第二保险丝与所述供电模块连接。
30、第三方面,本申请实施例提供了一种燃油车,所述燃油车实现上述遥控泊车制动方法的步骤。
31、相对现有技术,本申请具有以下有益效果:
32、本申请实施例提供了一种遥控泊车制动方法、装置及燃油车,应用于燃油车制动系统中的电子驻车制动系统,燃油车制动系统还包括电子稳定控制系统,电子驻车制动系统与电子稳定控制系统独立设置,该方法包括:当处于遥控泊车状态时,获取车辆的车速;当车速小于阈值时,判断是否接收到电子稳定控制系统发送的夹紧请求;其中,夹紧请求为电子稳定控制系统在硬件失效时发出;如果是,则对车轮进行夹紧。基于燃油车的布局,采用独立式电子驻车制动系统和电子稳定控制系统的制动冗余方法,在布置改动小,成本低的前提下,确保燃油车在遥控泊车过程中制动系统发生单点失效时,仍有能力刹停车辆。
技术特征:
1.一种遥控泊车制动方法,其特征在于,应用于燃油车制动系统中的电子驻车制动系统,所述燃油车制动系统还包括电子稳定控制系统,所述电子驻车制动系统与所述电子稳定控制系统独立设置,所述方法包括:
2.根据权利要求1所述的遥控泊车制动方法,其特征在于,在所述判断是否接收到所述电子稳定控制系统发送的夹紧请求的步骤之后,所述方法还包括:
3.根据权利要求1所述的遥控泊车制动方法,其特征在于,在所述获取车辆的车速的步骤之后,所述方法还包括:
4.根据权利要求1所述的遥控泊车制动方法,其特征在于,在所述获取车辆的车速的步骤之前,所述方法还包括:
5.根据权利要求4所述的遥控泊车制动方法,其特征在于,所述判断遥控泊车系统是否失效的步骤包括:
6.根据权利要求1所述的遥控泊车制动方法,其特征在于,所述电子驻车制动系统包括主控回路与备用回路,所述主控回路与所述备用回路均与车轮连接;所述对车轮进行夹紧的步骤包括:
7.根据权利要求1所述的遥控泊车制动方法,其特征在于,所述电子驻车制动系统包括主控回路与备用回路,所述主控回路与所述备用回路均包括第一线路与第二线路,所述第一线路与所述第二线路分别连接后左轮与后右轮;所述对车轮进行夹紧的步骤包括:
8.一种遥控泊车制动装置,其特征在于,应用于燃油车制动系统的电子驻车制动系统,所述燃油车制动系统还包括电子稳定控制系统,所述电子驻车制动系统与所述电子稳定控制系统独立设置,所述装置包括:
9.根据权利要求8所述的遥控泊车制动装置,其特征在于,所述燃油车制动系统还包括供电模块、第一保险丝与第二保险丝,所述电子驻车制动系统通过所述第一保险丝与所述供电模块连接,所述电子稳定控制系统通过所述第二保险丝与所述供电模块连接。
10.一种燃油车,其特征在于,实现如权利要求1-7中任一项所述的遥控泊车制动方法。
技术总结
本申请提供了一种遥控泊车制动方法、装置及燃油车,涉及制动技术领域。应用于燃油车制动系统中的电子驻车制动系统,燃油车制动系统还包括电子稳定控制系统,电子驻车制动系统与电子稳定控制系统独立设置,该方法包括:当处于遥控泊车状态时,获取车辆的车速;当车速小于阈值时,判断是否接收到电子稳定控制系统发送的夹紧请求;其中,夹紧请求为电子稳定控制系统在硬件失效时发出;如果是,则对车轮进行夹紧。基于燃油车的布局,采用独立式电子驻车制动系统和电子稳定控制系统的制动冗余方法,在布置改动小,成本低的前提下,确保燃油车在遥控泊车过程中制动系统发生单点失效时,仍有能力刹停车辆。
技术研发人员:张继深,李忠昊,陈秀梧,黄陆,尹春山,陈峰
受保护的技术使用者:海南海马汽车有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!