零重力座椅控制方法、电子设备及介质与流程
本申请涉及车辆,更具体地,涉及一种零重力座椅控制方法、电子设备及介质。
背景技术:
1、零重力座椅是一种座椅姿态可调节的座椅,旨在模仿宇航员在太空中所经历的失重感。通过对零重力座椅的座椅靠背、坐垫等部分进行调节,以使得零重力座椅能够与人体曲线更加贴合,使用者可以平躺、半躺在零重力座椅上,最大程度保证使用者的舒适。
2、随着人们对驾乘坐舒适性需求的提升,一种能通过调整座椅姿态,实现乘员身体各部位处于高度放松状态的零重力座椅,运用愈加广泛。进而,零重力座椅带来的行车安全问题也不容忽视,人们既希望享受零重力座椅提供的舒适姿态,又希望能得到行车状态下的安全保障。
3、公开号为cn11653836a的中国专利文献公开了名称为“一种零重力座椅控制方法、装置和汽车”、公开号为cn116548764a的中国专利文献公开了名称为“一种零重力座椅姿态调节方法及系统”、公开号为cn115352327a的中国专利文献公开了名称为“零重力座椅安全控制方法、系统、车辆及存储介质”,上述公开的现有技术中未考虑零重力座椅的安全控制,去规避行车状态下,因零重力靠背角度过大导致的碰撞安全风险;未考虑更全面的检测模块设计,实现更优的零重力座椅姿态推荐。
技术实现思路
1、鉴于以上现有技术的缺点,本申请的实施例提供一种零重力座椅控制方法、电子设备及介质,解决的技术问题:当前零重力座椅缺少安全控制逻辑,以规避行车状态下因零重力靠背角度过大导致的碰撞安全风险;未实现更优的零重力座椅姿态推荐。
2、为解决上述技术问题,在第一方面,本申请的实施例提供一种零重力座椅控制方法,所述方法包括:
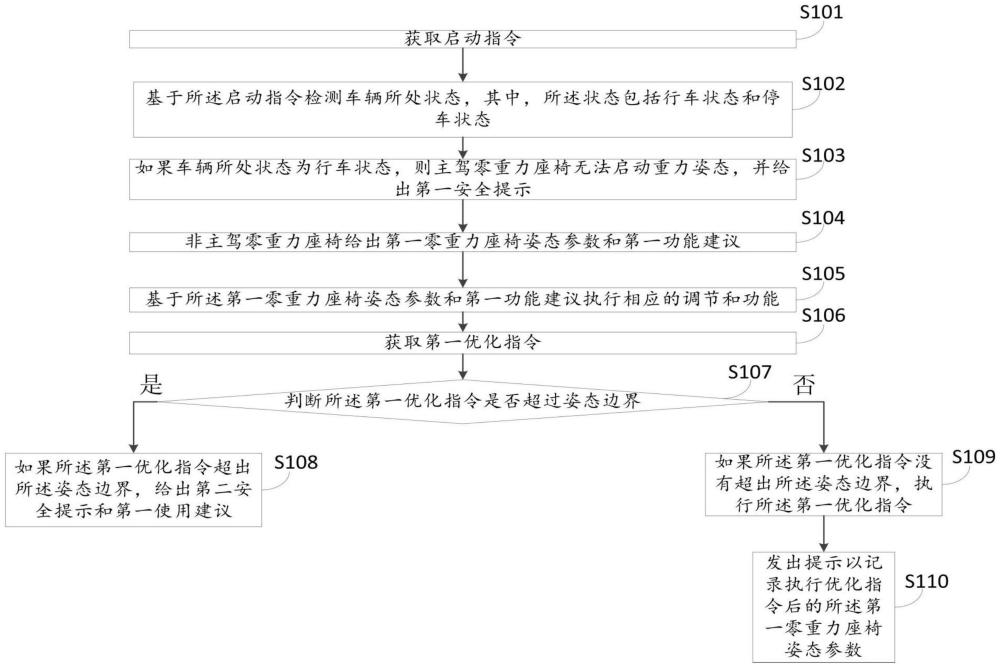
3、获取启动指令;
4、基于所述启动指令检测车辆所处状态,其中,所述状态包括行车状态和停车状态;
5、如果车辆所处状态为行车状态,则主驾零重力座椅无法启动重力姿态,并给出第一安全提示;
6、非主驾零重力座椅给出第一零重力座椅姿态参数和第一功能建议;
7、基于所述第一零重力座椅姿态参数和第一功能建议执行相应的调节和功能;
8、获取第一优化指令;
9、判断所述第一优化指令是否超过姿态边界;
10、如果所述第一优化指令超出所述姿态边界,给出第二安全提示和第一使用建议;
11、如果所述第一优化指令没有超出所述姿态边界,执行所述第一优化指令;
12、发出提示以记录执行优化指令后的所述第一零重力座椅姿态参数。
13、于本申请的一实施例中,如果车辆所处状态为所述停车状态,则主驾零重力座椅给出第二零重力座椅姿态参数和第二功能建议;
14、基于所述第二零重力座椅姿态参数和第二功能建议执行相应的调节和功能;
15、获取第二优化指令;
16、判断所述第二优化指令是否超过姿态边界;
17、如果所述第二优化指令超过姿态边界,给出第三安全提示和第二使用建议;
18、如果所述第二优化指令未超过姿态边界,执行所述第二优化指令;
19、发出提示以记录执行第二优化指令后的所述第二零重力座椅姿态参数。
20、于本申请的一实施例中,非主驾零重力座椅给出第三零重力座椅姿态参数和第三功能建议;
21、基于所述第三零重力座椅姿态参数和第三功能建议执行相应的调节和功能;
22、获取第三优化指令;
23、判断所述第三优化指令是否超过姿态边界;
24、如果所述第三优化指令超过姿态边界,给出第四安全提示和第三使用建议;
25、如果所述第三优化指令未超过姿态边界,执行所述第三优化指令;
26、发出提示以记录执行第三优化指令后的所述第三零重力座椅姿态参数。
27、于本申请的一实施例中,所述发出提示以记录执行优化指令后的所述第一零重力座椅姿态参数之后,还包括:
28、当检测到碰撞预警信号时,利用快速复位装置使靠背角度调整至预设角度;
29、对安全带进行预紧;
30、对安全气囊进行打开;
31、在碰撞过程中,对零重力座椅姿态进行调整;
32、在碰撞结束后,调整零重力座椅姿态至最小伤害建议姿态;
33、对碰撞过程中生成的相关碰撞数据进行存储。
34、于本申请的一实施例中,利用快速复位装置使靠背角度以20°/650ms调整至40°。
35、于本申请的一实施例中,所述安全气囊包括侧边气囊、坐垫气囊和头套式安全气囊。
36、于本申请的一实施例中,所述在碰撞结束后,调整零重力座椅姿态至最小伤害建议姿态,包括:
37、对乘员姿态进行调整;
38、对碰撞能量进行吸收;
39、降低乘员脊柱力;
40、降低腹部压力;
41、减少颈椎伤害。
42、于本申请的一实施例中,所述执行相应的调节包括执行功能调节、执行靠背角度调节、执行腿托角度调节、执行头枕调节,其中,所述执行功能调节包括通风功能调节、按摩功能调节、加热功能调节。
43、在第二方面,本申请的实施例还提供一种电子设备,所述电子设备包括:
44、一个或多个处理器;
45、存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述电子设备实现如上述的零重力座椅控制方法。
46、在第三方面,本申请的实施例还提供一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序被计算机的处理器执行时,使计算机执行如上述的零重力座椅控制方法。
47、如上,通过采用上述技术方案,本申请的实施例能达到的有益技术效果:通过零重力座椅碰撞场景控制逻辑,去规避行车状态下,因零重力靠背角度过大导致的碰撞安全风险;充分利用智能安全检测模块,为座椅控制器给出不同场景更优、更精准的零重力座椅姿态,解决人员还需要反复调整优化。
48、通过以下参照附图对本申请的示例性实施例的详细描述,本申请的其它特征及其优点将会变得清楚。
技术特征:
1.一种零重力座椅控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的零重力控制方法,其特征在于,如果车辆所处状态为所述停车状态,则主驾零重力座椅给出第二零重力座椅姿态参数和第二功能建议;
3.根据权利要求2所述的零重力控制方法,其特征在于,非主驾零重力座椅给出第三零重力座椅姿态参数和第三功能建议;
4.根据权利要求1所述的零重力座椅控制方法,其特征在于,所述发出提示以记录执行优化指令后的所述第一零重力座椅姿态参数之后,还包括:
5.根据权利要求4所述的零重力座椅控制方法,其特征在于,利用快速复位装置使靠背角度以20°/650ms调整至40°。
6.根据权利要求4所述的零重力座椅控制方法,其特征在于,所述安全气囊包括侧边气囊、坐垫气囊和头套式安全气囊。
7.根据权利要求4所述的零重力座椅控制方法,其特征在于,所述在碰撞结束后,调整零重力座椅姿态至最小伤害建议姿态,包括:
8.根据权利要求1所述的零重力座椅控制方法,其特征在于,所述执行相应的调节包括执行功能调节、执行靠背角度调节、执行腿托角度调节、执行头枕调节,其中,所述执行功能调节包括通风功能调节、按摩功能调节、加热功能调节。
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,当所述计算机程序被计算机的处理器执行时,使计算机执行如权利要求1至8任一项所述的零重力座椅控制方法。
技术总结
本申请公开了一种零重力座椅控制方法、电子设备及介质,该方法包括:获取启动指令;基于启动指令检测车辆所处状态;如果车辆所处状态为行车状态,则主驾零重力座椅无法启动重力姿态,并给出第一安全提示;非主驾零重力座椅给出第一零重力座椅姿态参数和第一功能建议;基于第一零重力座椅姿态参数和第一功能建议执行相应的调节和功能;获取第一优化指令;判断第一优化指令是否超过姿态边界;如果第一优化指令超出姿态边界,给出第二安全提示和第一使用建议;如果第一优化指令没有超出姿态边界,执行第一优化指令。本申请实施例能确保驾乘人员更安全的获得零重力座椅提供的舒适姿态。
技术研发人员:何鹏申,郜昊强,刘长宏,业德明,严佳丽,范彦冬,张席席,刘江,曹呈,任岗
受保护的技术使用者:安徽江淮汽车集团股份有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!