一种多轴车辆辅助驾驶系统协同控制方法
本发明属于汽车智能控制,具体属于多轴车辆的协同控制,尤其涉及一种多轴车辆辅助驾驶系统协同控制方法。
背景技术:
1、随着现代社会使用的地面车辆越来越多,交通电气化和汽车安全问题引起了人们的广泛关注。车辆稳定性控制可以大幅提高车辆稳定性,提高车辆安全性。
2、在各种车辆稳定性控制技术中,车辆防抱死制动系统(abs)和电子稳定控制系统(esc)是其中的两个代表性成果。一般来说,abs可以根据轮胎/路面附着情况调整制动力,防止轮胎抱死,减小制动距离。esc能够通过执行差动制动/驱动来帮助车辆稳定,即对每个车轮施加不同的制动/驱动扭矩,以产生额外的直接偏航力矩控制(dyc)。此外,主动前转向系统(afs)也是esc的有效工具,其与dyc的集成可能比单独执行两者产生更好的效果。
3、提高abs控制性能的方法大致可分为两类,即基于规则的方法和基于模型的方法。其中基于规则的方法被广泛使用,但其控制效果严重依赖于工程师的经验,缺乏最优性,这可能会显著降低abs的性能。为了提高abs的性能,近年来出现了基于模型的控制方法。
4、esc的目标是在确保车辆横向稳定性的同时实现驾驶员的意图。传统上,实现车辆esc的方法有两种,即通过afs和dyc。abs控制和esc与afs或dyc的协同对于提高车辆在紧急制动场景下的稳定性具有巨大的潜力。
5、abs和esc都可以作为多轴车辆子系统通过独立控制每个车轮的制动力来实现。然而,它们的控制目标是相互冲突的,这在一些复杂的驾驶条件下变得更加麻烦。因此,如何协同控制车辆中的各个子系统是一个挑战。
技术实现思路
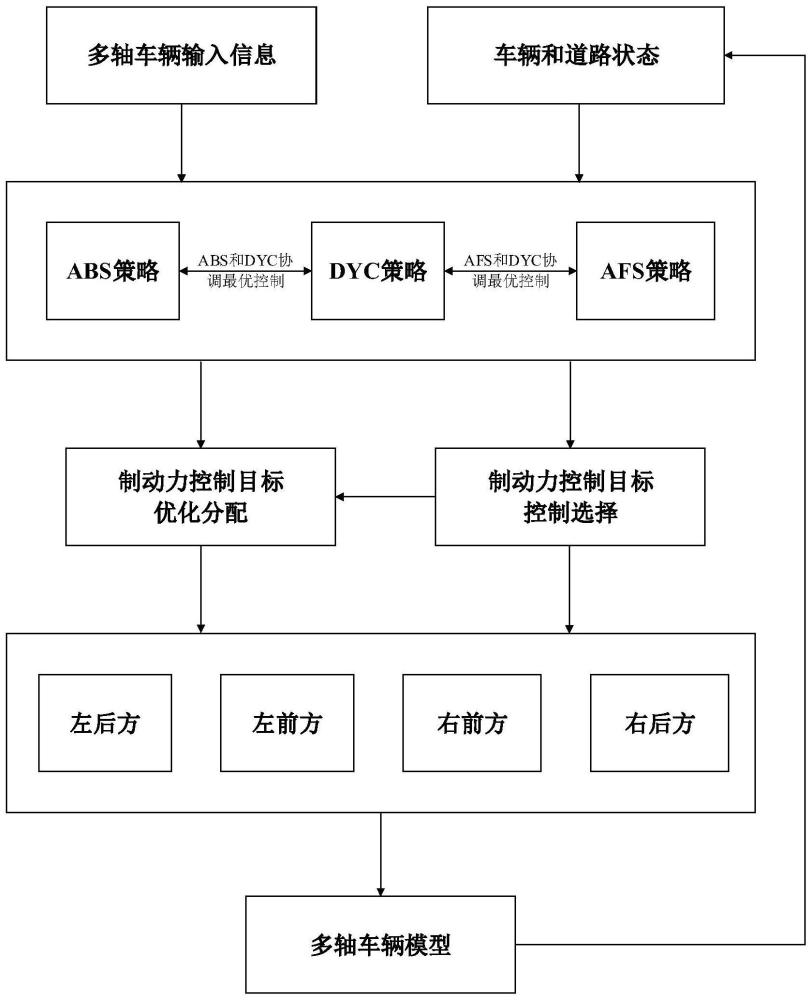
1、针对现有技术中存在的上述问题,本发明的目的在于提供一种多轴车辆辅助驾驶系统协同控制方法,通过构建dyc与abs、dyc与afs的协同控制模块,通过协同控制车辆中的各个子系统,在保持车辆横向稳定性的同时实现制动力最大化,尤其适用于复杂驾驶情形中。
2、本发明提供的一种多轴车辆辅助驾驶系统协同控制方法,包括以下步骤:
3、步骤1)构建车辆平面运动模型,获取紧急制动时的运动方程;采集车辆状态输入所述运动方程,得到多轴车辆所受的合力以及车辆的偏航力矩;若检测到车速超过预设速度,表示车辆高速行驶,或者检测到车辆出现紧急躲避动作时,进入步骤4执行,否则进入步骤2继续执行;
4、步骤2)根据驾驶员意图推导并跟踪dyc控制所需的横摆角速度,在不考虑制动执行机构故障的情况下启动dyc与abs协同模块,执行常规abs控制,使制动力最大化,并综合作动器故障等约束条件;
5、步骤3)dyc与abs协同模块启动dyc控制,dyc控制中充分利用轮胎/道路的最大附着力,以最小化轮胎负荷和避免车轮制动锁死为目的的最优转矩分配;
6、步骤4)启动dyc与afs协同模块,在dyc与afs协同模块中,将每个车轮视为一个智能体,作为无向图的节点,基于图论构造多轴车辆的afs和dyc的协同控制模型的输出预测方程和约束条件,求解得到控制增量序列,用于对afs与dyc子系统协同控制。
7、所述步骤1中,紧急制动时涉及abs/dyc控制的车辆部件主要包括车辆控制单元(vcu)、电子液压制动装置(ehb)、制动压力传感器(bps)、轮速传感器(wss)和转向角传感器。每个车轮的制动压力可通过bps进行测量,并由vcu通过can总线进行控制。
8、所述步骤4中,将每个车轮视为一个智能体,并作为无向图的节点,在dyc与afs协同模块中基于图论构造多轴车辆的afs和dyc偏差模型,偏差模型的状态方程如下:
9、i∈wheels,其中:
10、状态矩阵参数矩阵
11、其中,wheels表示车轮集合;输出矩阵ysi包括车轮i侧向力单独作用时的横摆角速度偏差δγi和侧滑角偏差δβi;γi和βi分别是车轮i侧向力单独作用时车辆质心的横摆角速度和侧滑角;kβi表示侧滑角对横摆角速度的影响系数,kγi表示横摆角速度对横摆角的影响系数,kαi表示轮胎侧偏角对横摆角速度的影响系数,kβi表示侧滑角速度对自身的影响系数,kγi表示横摆角对侧滑角速度的影响系数,αawfi为轮胎i的转向角度,ti是车轮i的驱动力矩,ηαi是αawf1对车辆侧滑角速度的影响程度,ηti是ti对车辆侧滑角速度的影响程度,αawf1是车轮i的轮胎侧偏角。
12、利用正演欧拉方法离散化所述的偏差模型的状态方程,再通过矢量变换将车辆质心的横摆角速度与侧滑角解耦,得到基于图论的多轴车辆的afs与dyc协同控制增量模型;进一步对所述增量模型进行变换,推导获得基于图论的多轴电动车辆的afs和dyc协同控制模型的多步输出预测方程,并构造预测方程的约束条件,求解控制增量序列,用于afs与dyc对车辆质心的横摆角速度和侧滑角与理想值的偏差进行定向。
13、所述预测方程为:yip(k)=hixi(k|k)+kiδuim(k);
14、参数矩阵
15、其中,k为当前k时刻,p为预测时域,m为控制时域,xi(k|k)为当前k时刻的状态,δuim(k)为afs与dyc协同控制模型k时刻输出的决策变量,是调整afs与dyc的控制变量的增量。
16、所述的多轴车辆的afs与dyc协同控制模型的预测方程的约束条件如下:
17、diδuim(k)≥bi;其中,δuim(k)为afs与dyc协同控制模型k时刻输出的决策变量,参数矩阵体积约束的控制参数矩阵增量约束的控制参数矩阵uimax和uimin分别为控制变量的最大值和最小值,如下获得:
18、
19、其中,tm是车轮的最大驱动力矩,fzi是车轮i的垂直载荷,fyi是车轮i为y方向上的侧向力,μ是权重因子,r是轮胎半径;δuimin(k)和δuimax(k)分别表示k时刻的控制变量的最小增量和最大增量。
20、与现有技术相比,本发明的有益效果如下:
21、(1)本发明方法从整体角度出发,根据不同工况进行协同控制,主要包含dyc与abs协同和dyc与afs协同模块,基于车辆动力学的角度,设计了整车协同控制模块,以消除轮毂电机响应差异及故障对车辆直线行驶稳定性和转向操纵稳定性的影响。本发明方法实现了对多轴车辆abs和esc等各个子系统的协同控制,以适用于复杂驾驶场景下的车辆稳定性控制。
22、(2)本发明基于图论和多智能体设计了多轴车辆的afs和dyc偏差模型,并推导出了afs与dyc协同控制模型的多步输出预测方程,构建了约束条件,将多轴车辆afs与dyc子系统协同控制问题转化为带约束的标准线性二次规划(qp)问题,求解该问题,获得用于对车辆的横向摆动角速度和质量横向偏转角偏差进行定向的控制增量序列,从而实现了afs和dyc子系统的协同控制。
技术特征:
1.一种多轴车辆辅助驾驶系统协同控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述的步骤2中,进行abs控制时,在综合作动器故障的约束条件下使制动力最大化;进行dyc控制时,利用轮胎与道路的最大附着力,以最小化轮胎负荷和避免车轮制动锁死为目的进行最优转矩分配。
3.根据权利要求1所述的方法,其特征在于,所述的步骤3中,利用正演欧拉方法离散化所述偏差模型的状态方程,得到如下:
4.根据权利要求1或3所述的方法,其特征在于,所述的步骤3中,采用滑模变结构控制和分布式模型预测控制结合的方式,建立afs与dyc协同控制模型的预测方程的约束条件,如下:
5.根据权利要求1或2或3所述的方法,其特征在于,所述的步骤3中,进行dyc控制时,对车辆的左前轮胎和右前轮胎施加制动力,如下:
6.根据权利要求1或2或3所述的方法,其特征在于,所述的步骤2中,通过下面滑模控制器跟踪期望的横摆角速度:
技术总结
本发明公开了一种多轴车辆辅助驾驶系统协同控制方法,属于多轴车辆智能协同控制领域。本发明包括:构造车辆平面模型;根据驾驶员意图推导并跟踪DYC控制所需的横摆角速度,在不考虑制动作动器故障的情况下进行常规ABS控制和DYC控制;当检测到车辆高速行驶或出现紧急躲避动作时,进行DYC与AFS协同控制,基于图论构造车辆的AFS和DYC偏差模型,推导AFS和DYC协同控制的多步输出预测方程,选择约束条件,求解控制增量序列,对车辆质心的横摆角速度和侧滑角偏差进行定向。本发明通过协同控制车辆中的各个子系统,以消除轮毂电机响应差异及故障对车辆直线行驶稳定性和转向操纵稳定性的影响,尤其适用于复杂驾驶情形中。
技术研发人员:张辉,梁经国,徐向阳,董鹏
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!